 ABB机器人如何与相机详细方法通讯图文讲解
ABB机器人如何与相机详细方法通讯图文讲解
ABB机器人如何与相机通讯
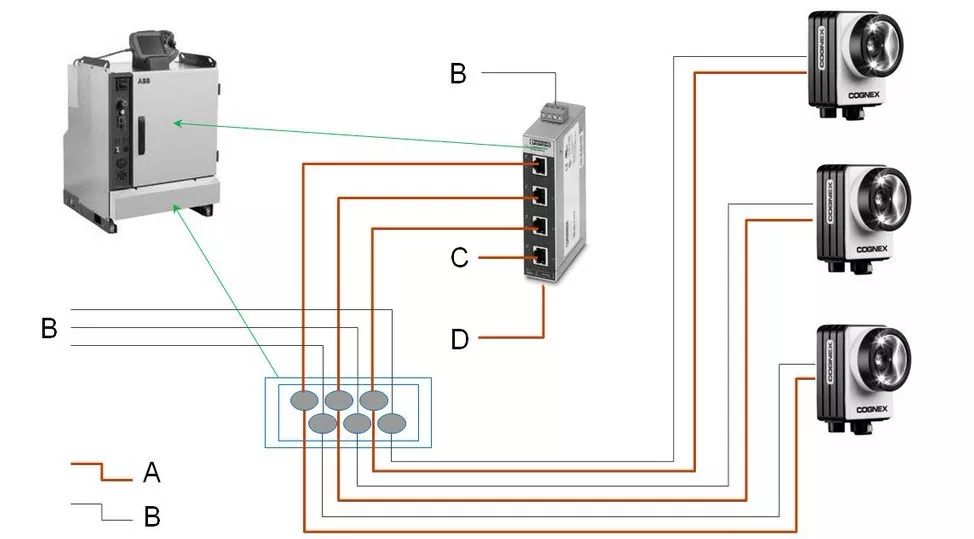
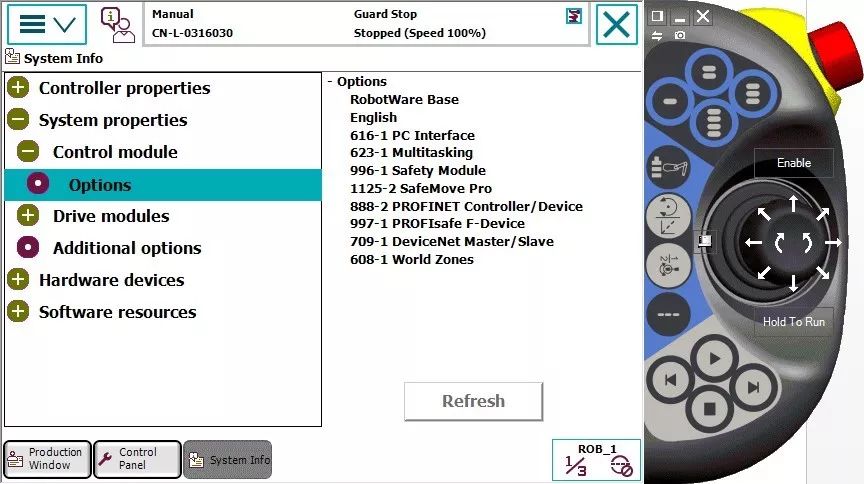
1)机器人与相机一般采用socket通讯(TCP/IP)。所以机器人需要有pc-interface选项。
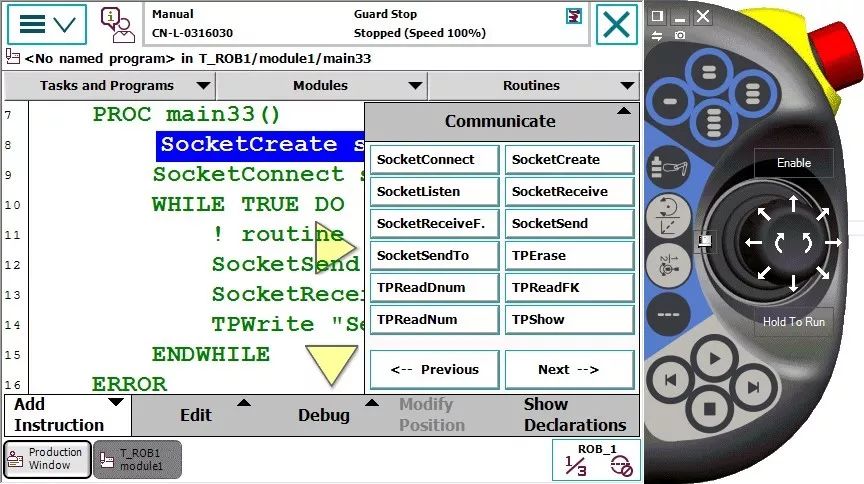
2)机器人一般做client,在示教器-程序编辑器,添加指令-communicate下找到SocketCreate,如下图:
3)下图为机器人做client与相机通讯的一般步骤:
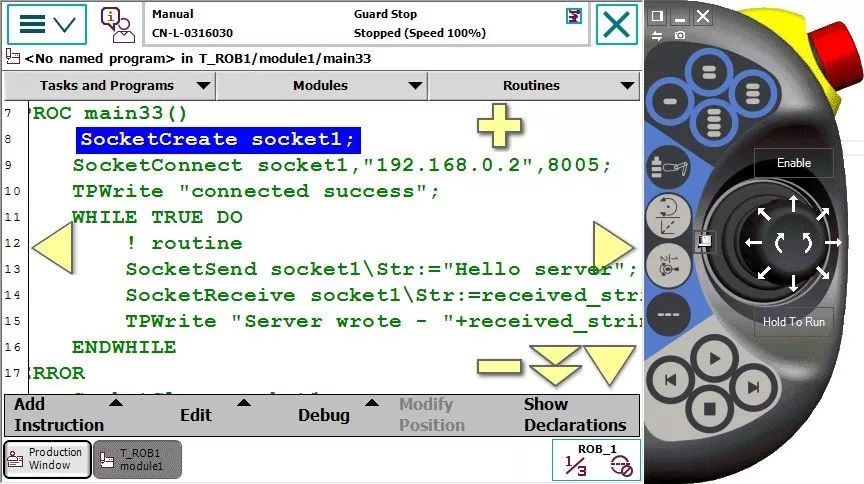
SocketCreate socket1; //创建套接字
SocketConnect socket1,"192.168.0.2",8005; //连接server,这里需要设置server的ip和端口。
TPWrite "connected success" ;//连接成功后输出信息
WHILE TRUE DO
!routine
SocketSend socket1Str:="Hello server";//向server发送请求
SocketReceivesocket1Str:=received_string;//从server接受数据字符串,并存储到received_string字符串
TPWrite "Server wrote- "+received_string;//写屏收到的字符串
END WHILE
4)如果通讯成功,机器人就能收到相机发送过来的字符串,举例如下,即x偏量1.23,y偏量4.56,角度7.89。
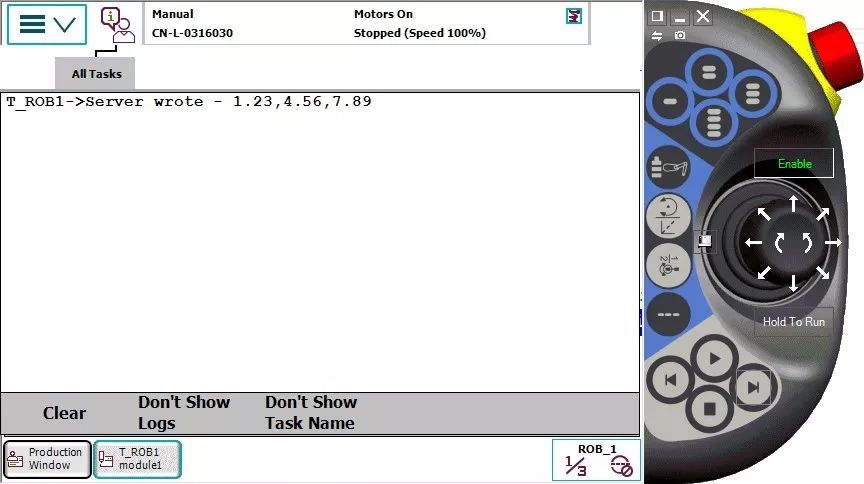
快去试试你的机器人能不能连上相机吧!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
212文章
28904浏览量
209640 -
TCP
+关注
关注
8文章
1389浏览量
79625 -
ABB
+关注
关注
26文章
531浏览量
53221
原文标题:图文详解ABB机器人如何与相机通讯
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ABB IRB5400-喷涂工业机器人
` 本帖最后由 京五环以外 于 2015-1-14 11:17 编辑
ABB机器人IRB 5400是一个喷涂机器人家族,拥有喷涂精确、正常运行时间长、漆料耗用省、工作节拍短以及有效集成涂装设备等
发表于 01-14 11:16
请教各位Labview与ABB机器人怎么进行Profinet通讯
想用Labview做机器视觉,怎样将Labview通过视觉算出的工件的偏移量以及偏移角度的值通过Profinet网络赋于ABB机器人里的变量(变量类型:num)?
发表于 10-31 13:15
ABB焊接机器人问题
我的ABB机器人做焊接用。机器人给焊机的doweldon信号正常,也与机器人内部的weldon信号映射过,但是在使用编程指令arcl /arclstart arclend等指令时不能工
发表于 10-16 23:07
请问各位老哥:stm32直接can总线连接devicenet与abb机器人通讯可行?
stm32直接can总线连接devicenet与abb机器人通讯可行吗,需要另外加隔离或升压设备吗?请老哥们不吝赐教!
发表于 02-13 19:58
青岛ABB工业机器人无法正常进入系统故障维修
青岛ABB工业机器人无法正常进入系统故障维修原因:导致ABB机器人出现此类无法正常进入系统故障,可能有以下几个原因:①控制器的SD卡故障;②主计算机模块内的
发表于 07-16 14:10
ABB机器人维修保养指南
发挥到了快速、准确、实惠的优势,而且大大降低了维修费用。维修价格合理。我们的维修工程师会全职全责,服务到底。 上海仰光电子机器人技术有限公司主营产品:ABB机器人集成销售|工业机器人配
发表于 08-19 10:32
基于ABB机器人的应用协议RAP
介绍了ABB公司的机器人应用协议RAP,该协议提供了一个ABB S4 系列机器人控制器的应用接口,利用协议中的服务可以和机器人
发表于 10-16 09:56
•9次下载

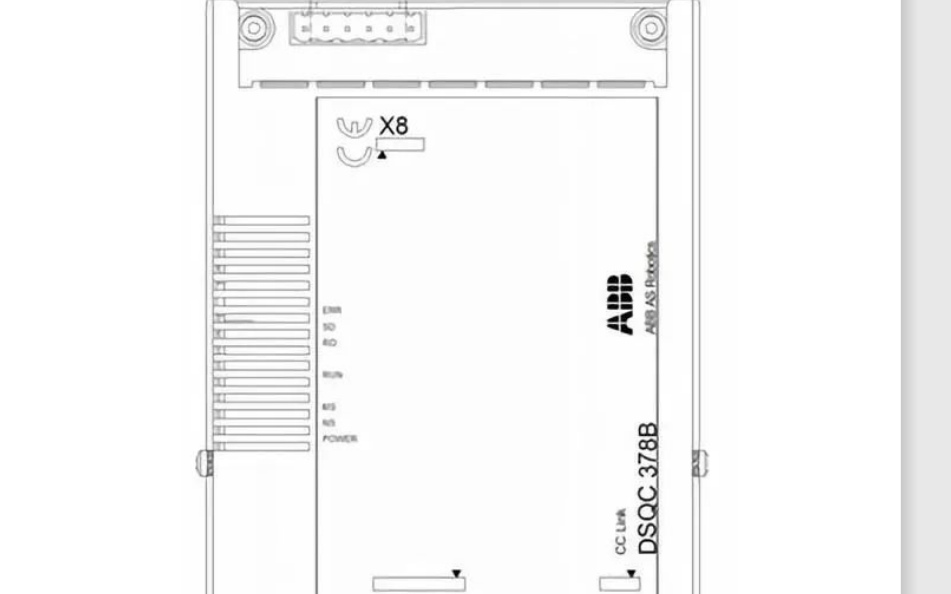
ABB机器人的CCLink配置详细资料说明
ABB机器人提供CC-Link总线的支持。ABB机器人通过DSQC 378B(如下图)模块,把CC-Link协议转化成Devicenet协议,与机
发表于 03-24 08:00
•7次下载


ABB机器人与西门子PLC的Profinet通讯设置
在现代工业自动化领域中,机器人与PLC之间的通讯是实现高效、精准生产的重要环节。ABB机器人与西门子PLC之间的Profinet通讯设置,是
ABB机器人与西门子PLC通讯案例
重要意义。本文将通过一个详细的案例,解析ABB机器人与西门子PLC之间的通讯实现过程,涵盖硬件准备、网络配置、通讯设置、编程调试及故障排查等





 工商网监
工商网监
评论