 飞马F300在大面积实景三维模型生产中的应用
飞马F300在大面积实景三维模型生产中的应用
飞马F300无人机一经推出,就受到了广大用户的喜爱。尤其是其免像控技术的加持,让航测外业省去了大量像控点布设和测量的麻烦,大大提高了航空摄影测量外业的工作效率。同时其还提供载荷的多种选择,不但可以选择正射相机,还可以选择多镜头倾斜相机,这在轻型固定翼无人机中是首创。本文要讨论的应用,正是基于飞马F300飞行平台,搭载倾斜相机进行倾斜摄影测量[1]外业航飞,并对获取的影像进行处理,经过空三计算和模型重建来生产城市真实景三维模型[2]。本项目采用布设稀少像控点的方案进行工程的施测。
一、工程项目概述
1.1、项目基本情况
为推进长岭县基础设施建设,促进长岭县城市及经济发展,我司受甲方委托,对长岭县城区进行地理信息数据的采集。项目要求采用倾斜摄影测量技术[1],并生产城市实景三维模型。此工程测区面积约11平方公里,位于吉林省西北部,整体地势平坦,有国道和省道穿过测区,交通较便利。测区属中温带大陆性季风气候,年平均气温4.9℃;测区内常年有风,项目施测季节最大风力可达8级,对无人机飞行有很不利影响。项目飞行空域已由甲方申请并通过批准。
图1测区范围示意图
根据项目需求,要求真实景三维模型成果要能满足1:1000数字线划图(DLG)生产需要,平面中误差±0.25m,高程中误差±0.17m,最大允许误差不超过2倍中误差。测量基准采用国家2000坐标系统,1985国家高程基准,控制测量基础资料由甲方提供。工程中RTK数据采集统一使用吉林省CORS网系统作为差分源。
1.2项目执飞无人机情况
参与项目航测飞行的飞行平台是深圳飞马机器人公司生产的F300智能航测遥感系统。该无人机机长1.07米,翼展1.8米,支持RTK/PPK差分模式,续航时间最长可达90分钟,巡航速度60KM/H,能在5级风的情况下正常作业,且无遥控器,手抛起飞,自动滑降或者伞降的降落方式,对飞手要求低,EP0加碳纤复合材料易修复。无人机这些特点,让此款无人机能经得住测绘工程项目繁忙的飞行需求,且在轻微损坏的情况下能够快速修复而继续飞行,不会耽误紧张的测绘工期。
图2 飞马F300智能航测遥感系统及倾斜相机
飞马F300挂载的倾斜相机如上图右上角,是两镜头倾斜相机。此倾斜相机的单个镜头采用APS-C(23.2×15.4mm)画幅,2010万像素,索尼QX1相机和索尼20mm焦距镜头。两个镜头布置方式是一个镜头向左倾斜,一个镜头向后倾斜,有效像素为5456×3632。此倾斜相机,需无人机以往返飞的方式来获取足够多角度的原始影像数据。
二、工程项目实施
2.1、项目生产工艺流程
无人机倾斜摄影测量技术是新兴航测技术方法,各种具体的执行标准尚不完善,为了更好的完成工程项目,根据技术设计文件以及相关资料,制定了项目工程生产工艺流程,项目的执行严格按照工艺流程的要求来施测。工艺流程如下图所示:

图3、生产工艺流程图
2.2、项目外业实施
2.2.1、像控点布设及测量
依据甲方提供的项目基础资料和项目要求,并参照奥维互动地图,在室内根据踏勘的信息资料,按照10000到20000像素一个像控点[2],并考虑实际布点可行性,做像控点位置分布的预设。像控点的布置,我们采用L型的图案,此图案在实际工作中最容易喷涂,需要的辅助工具最少,同时边上喷上点号,方便后期处理使用,甚至可以不参考点之记信息就能完成刺点。简单易行的像控点布置,在能保证像控点质量的前提下,可以尽可能的提高外业工作效率。在测量像控点的同时,进行点之记信息的记录。像控点的测量采用控制点测量的方式进行平滑采集。
图4像控点设计分布图
图5 像控点布设与测量
2.2.2、外业航飞的实施
外业航飞对后期数据处理来说,是很关键的一环。好的航线设计,是外业飞行数据高质量的关键之一。按照相关技术资料和要求,在飞马智航线软件里,导入测区kml格式范围线,进行飞行航线的规划和飞行参数的设置。
项目航线主要设计参数如下:
相机型号:ILCE-QX1
地面分辨率:5.0cm
航向/旁向重叠度:80%
航线角度:80度
相对航高、航线间隔、拍照间隔等数据,智航线软件会自动给计算出来。这也是飞马无人机管家软件设计比较人性化的表现之一。
图6 航线规划图
按此航线规划方案,在今年6月初,项目无人机作业组完成了长岭县城倾斜摄影测量的航摄工作。航测外业执飞无人机是飞马F300智能航测系统挂载两镜头倾斜相机,采用往返飞的方式飞行。由于天气原因,外业实际用时4天,共计飞行14架次,获得外业原始影像27972张,相应的静态数据文件和观测记录表格,飞机日志数据文件,每一架次飞行情况记录等资料。
图7 外业飞行现场
2.2.3、外业航飞数据的预处理
航飞数据的预处理是完成高精度POS数据的融合解算。在飞马无人机管家软件智理图模块中,分步骤完成基站静态数据格式转换,机载GPS数据转换,数据完整性检查,GPS数据解算。解算完成后输出txt格式的解算结果,在解算结果文件的第一行有Q1值用来评定此次解算结果的精度,一般要求在98以上[3]。然后对照片和POS数据进行整理,并按计算机处理能力,对测区进行处理分区的划分。
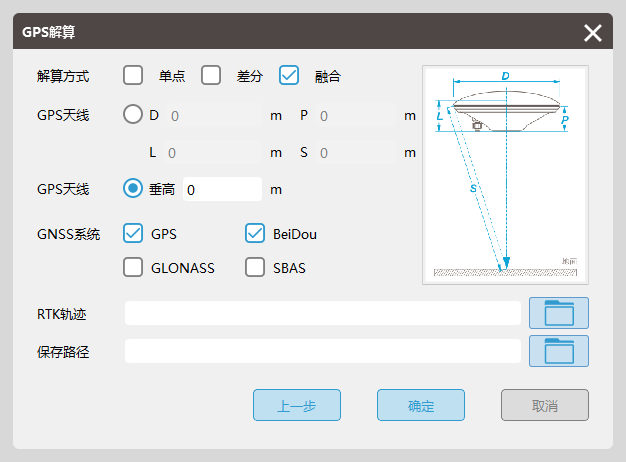
图8 GPS数据融合解算
三、数据处理及实景三维模型生产
3.1、影像数据空三计算
本项目采用的建模软件是Context Capture软件,此软件自动化程度高,操作步骤较少,能支持集群运算,是业内知名的自动化三维建模软件。在软件里新建工程,添加照片和POS数据,按默认参数提交空三计算,软件会自动完成空三计算。如果结果不合格,就在计算结果基础上修改空三计算参数并再次提交空三,直到空三合格为止。空三计算通过后,加入像控点坐标数据,并进行相片刺点,这时候软件能预计出像控点在相片上的位置了,且准确度很高,能提高刺点的速度。刺点完成后,再次提交空三计算,完成后检查空三报告质量,如果合格,就可以进行模型重建生产了。在控制点编辑器里有三个参数,分别是三维精度、三维水平精度和三维垂直精度,这三个精度参数,基本上能体现出最终模型数据的精度水平等级。

图9 像控点三维精度水平计算结果
图10带像控点的空三成果3D视图
3.2、三维模型的重建
空三成果合格后,下一步就进入模型重建生产了。选择项目需要的坐标系,并从KML文件导入重建范围(即测区范围),设置好切块方式和瓦片大小,就可以提交模型重建生产,真正开始生产模型。Context Capture软件模型重建支持的数据格式很多,本项目采用OSGB格式。OSGB数据格式通用性比较好,支持的软件也比较多。
图11模型重建参数和瓦片分块
模型重建生产是比较耗时间的,重建速度主要取决于计算机的整体计算速度。此项目采用5台电脑,耗时将近5天才把模型全部生产完毕。
图12 模型成果截图
图13 模型成果局部截图
3.3、模型成果精度检查
测绘产品精度是测绘工程项目的核心目标,实景三维模型成果已经生产完毕,对成果精度的检核就是必须的要做的事情。我们联合甲方一起对模型进行了一个精度的检查,用RTK设备在测区测量了400个检查点,最终选择了399个平面检查点和375个高程检查点,对模型精度进行了检查。检查结果统计情况如下表所示:
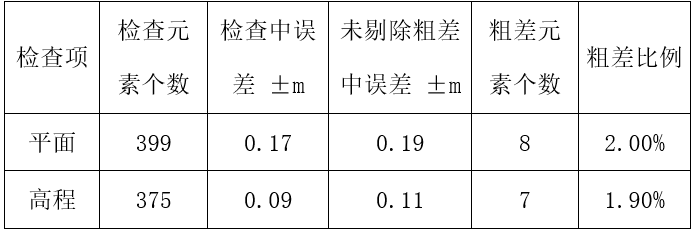
表1 模型精度检查统计表
由上表统计数据来看,该工程项目的成果精度完全达到了项目设计要求,甚至比设计的精度还高出一点。这些数据表明,使用飞马F300智能航测/遥感系统搭载倾斜相机的方案,采用合理的作业工艺流程,是完全可以满足大比例尺测图精度要求的。最终采用的检查点分布情况如下图所示:
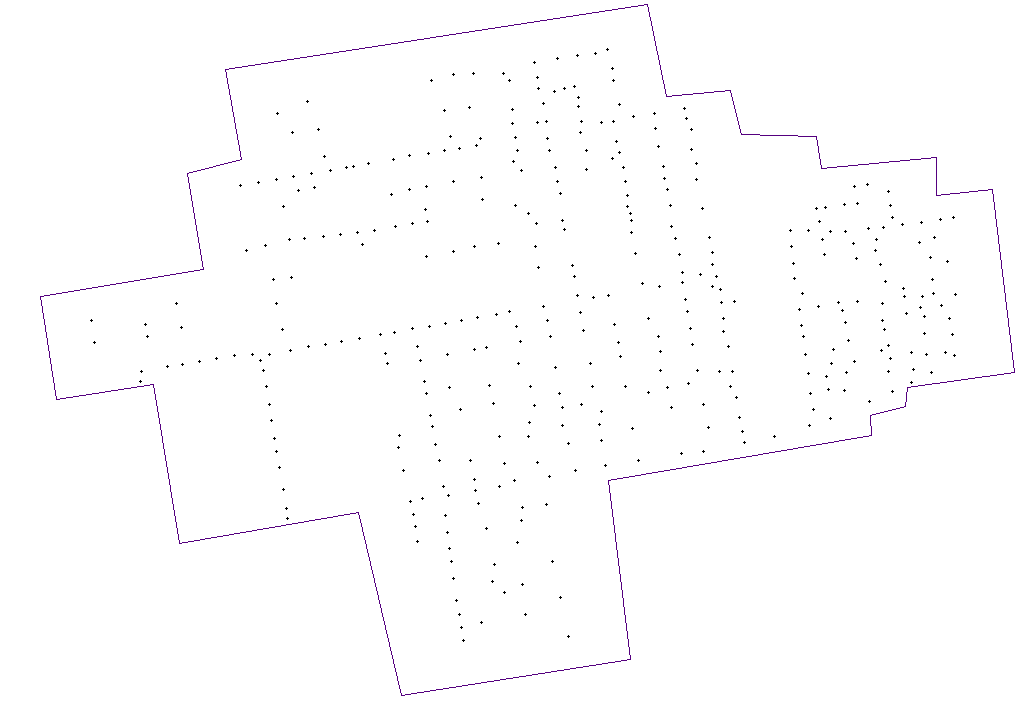
图14 模型精度检查点位置分布略图
四、总结和展望
此工程项目的外业投入人员是踏勘2人一天,像控点2人一天,外业飞行2人4天,内业处理共计1人7天,其中人工操作约1天,其它时间是计算机自动完成计算。计算下来,采用飞马F300搭载倾斜相机的方案,效率是传统测绘方式的10倍甚至更高。
倾斜摄影测量近年来发展迅猛,逐渐成为测量人员很好的测量技术;在保证精度的前提下还能大大的提高测绘的作业效率;降低外业测绘作业人员的劳动强度,也使外业测绘人员的人身安全有了更好的保障;传统测绘不易到达的地方也能测的到,让测绘几乎没有死角;且提供的测绘成果表现形式更容易让普通大众看得懂、理解到位,相当于把现实城市搬回了家。这些优势都是传统的人工测绘所不具备的。在实景三维模型上进行线划图的采集和建库,也是倾斜摄影测量数据成果的一个主要应用方向。业主方已经在此项目成果上采集完成测区1000比例尺的线划图。
图15 基于模型成果采集的局部线划图成果
未来随着5G通信技术的逐渐应用和普及,使实景三维模型数据的在线浏览和应用成为可能,就能为普通大众提供更好地图服务,比街景数据更加真实,而且可以360度的旋转查看;也能为政府相关管理部门提供基于真实景的基础平台应用,再加上更多的各种物联网和传感器数据,让城市的管理和服务水平上一个台阶。
总之,飞马F300智能航测遥感系统,经受住了此项目的实际检验,能满足大比例尺实景三维模型数据的采集和生产需要。飞马F300智能航测遥感系统一定能成为广大测绘从业者爱不释手的测量工具,能为地理信息行业的兴旺发展提供一定的助力。
-
数据采集
+关注
关注
39文章
6138浏览量
113739 -
无人机
+关注
关注
230文章
10456浏览量
180912 -
三维模型
+关注
关注
0文章
50浏览量
13131
原文标题:飞马F300在大面积实景三维模型生产中的应用
文章出处:【微信号:feimarobotics2015,微信公众号:飞马机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高温大面积碳化硅外延生长装置及处理方法
三维测量在医疗领域的应用
三维测量技术在工业中的应用
南方智能SmartGIS Inspec实景三维质检软件介绍
三维扫描与建模的区别 三维扫描在工业中的应用
三维激光扫描仪应用领域 三维激光扫描仪与传统测量工具比较
商汤科技运用AI大模型实现实景三维重建
南方智能推出三维地理实体生产软件
泰来三维 工厂三维扫描建模技术服务

泰来三维 三维激光扫描结合BIM在工厂扫描建模中的优势

泰来三维| 三维扫描在汽车工厂生产改造中的应用
泰来三维|文物三维扫描,文物三维模型怎样制作






 工商网监
工商网监
评论