 无人机航空摄影测量技术在引黄济宁调水工程中的应用
无人机航空摄影测量技术在引黄济宁调水工程中的应用
一、引言
1.1 引黄济宁调水工程简介
青海省位于我国西部,是多民族聚居区,自然条件差,经济发展滞后,为全国最为贫困的地区之一。位于青海省东部的西宁市和海东市是全省政治、经济、交通、文化中心地区,以仅占全省2.9%的土地面积,3.5%的水资源量,支撑了全省58%的人口,57%的GDP和54%的耕地面积。
引黄济宁调水工程是国务院西部开发领导小组确定的近期重点推进的引调水工程,供水对象包括西宁—海东城市群、湟水两岸农业及生态林带供水以及湟水干流生态补水,初步考虑近期调水量6亿m³,远期调水量12亿m³。工程以黄河干流已建龙羊峡水库为取水水源,经隧洞穿越拉脊山自流输水,受水区分东线城市群、南线湟水南岸灌区、北线湟水北岸生态林三条供水线路。
1.2 引黄济宁工程的意义
引黄济宁调水工程是稳增长、促发展、惠民生的重大举措,是贯彻落实“五大发展理念”和国家西部开发战略的重大水资源保障工程,对加快青海省现代化建设、牢筑西部生态安全屏障、实现民族复兴具有重大战略意义。
1.3无人机航空摄影测量技术的应用
传统大比例尺地形图测绘通常由外业人工测量和大飞机航空摄影测量完成,但是这两项传统技术有明显的短板:人工测量单点精度最高,但是需要足够的地形点才能准确描述地形,且需大量的人力物力,周期长,效率低下,受天气、地形、交通等因素的影响和制约;大飞机航测需要专业的大型起降场地,空域申请手续繁琐,优势在大范围大面积(全省或全国)测图中能得到体现。低空无人机航测技术,有灵活机动、外业工作量少等优势,在中小范围地形图测绘中有明显的优势。
该项目所在区域地形复杂,时间紧任务重,传统的大比例尺测图方法无法如期完成,无人机航测技术在该项目中的应用,其高效率、高机动性的优点得到了很好的发挥。
二、无人机航空摄影测量技术
随着无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出它的优势,无人机航空摄影测量技术是无人机与航空摄影测量的完美结合。无人机航空摄影测量相对于传统外业人工测量和大飞机航空摄影测量,具备以下优点:①携带方便,无需专业飞行跑道和复杂的空域申请,可快速进入测区开展工作;②操作简单,成本较低,作业人员培训周期较短;③飞行高度低,可以获取厘米级高分辨率的影像数据;④效率高,一天能拍摄几十个平方公里的影像;⑤对环境要求较低,可以胜任危险区域的飞行任务。
无人机航测相对于传统测绘手段的诸多优势,近年来得到了广泛的应用,已广泛应用于各行业的大比例尺测绘、灾害应急、规划、土地资源调查等领域。
2.1 无人机航测系统组成
无人机航测系统主要包括飞机平台系统(动力系统传感器、信号处理、GNSS接收、无线电控制)、定位定姿系统(简称POS系统,主要包括GNSS导航定位系统和IMU定姿系统)、信息采集系统(相机、传感器、无线电控制)、地面控制系统(无线电控制、GPS导航、计算机、数据处理系统)、电源系统等。本项目测区飞行采用深圳飞马机器人科技有限公司生产的F300固定翼平台,影像获取搭载SONY DSC-RX1RⅡ相机,飞控系统采用飞马无人机管家3.0航测系统,数据处理采用清华山维3.0、CAD2010等图像处理软件和绘图软件。
2.2 技术测图原理
无人机航摄技术的基本原理是通过搭载在无人机飞行平台上的相机,采集地面上的影像数据和飞机飞行数据,然后用计算机(工作站)处理影像数据,用绘图系统处理影像数据、图形显示和成果输出。
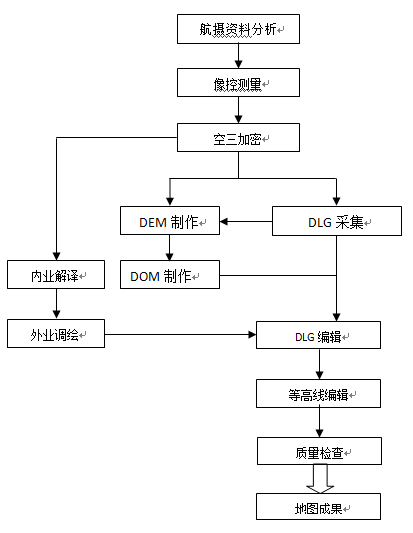
2.3作业流程
基于无人机航摄技术快速测制大比例尺地形图的作业实施流程主要分为外业测量和内业处理。外业包括影像获取、像控布设测量、航线设计及飞行实施、影像质量检查、pos数据处理、检查点测量与外业调绘等;内业数据处理包括空三加密、DEM、DOM生产、立体测图、DLG生产、编辑成图、数据检查及验收等。
流程图如下:
三、无人机航测技术在引黄济宁项目中的应用
此次测量任务涉及青海省西宁市、贵德县、湟中县、平安区、乐都区、民和县6个行政地区,有23处1:2000地形图测绘任务,时间紧任务重,有8处测区为山地和高山区,海拔均超过2500米,山势陡峭,交通不便,人工测量难度大,为保证工期和质量对这8处测区进行无人机航测,其他测区用传统测图方式进行测绘。本次航空摄影作业采用电机固定翼无人机(飞马F300),搭载SONY RX1RII数码相机,航空摄影地面分辨率12cm,采用航空摄影相机焦距35mm,本文以测区一(拉西瓦镇测区)和测区二(南干渠受水区林地典型地块测区)为例进行阐述。
3.1 外业
外业包括:无人机外业环境及路线的选定,无人机起飞,无人机的降落以及像控点的采集。
3.1.1 无人机路线的选定
一般在谷歌地球上选好起飞降落的地方,再实地踏勘确定。起降点应选在方圆100米范围内无遮挡的平坦区域,远离公路、高压电线、建筑物等。选好起降点,把测区范围导入飞马公司的无人机管家软件的智航线模块,测出起降点坐标,选择航测范围,软件自动计算航线、架次等,做好起飞前的准备。
3.1.2 无人机的起飞
一般选在晴朗的天气,最好云少风小(风力在5级以下)的上午10点至下午2点的时间段(此时段太阳较高,采集的影像清晰且阴影较小)进行飞行。飞马仪器公司的F300型无人机采用抛投起飞方式,航测人员经过专业培训,取得飞行执照后方可操作。此次航测区域海拔高空气稀薄,抛出后有时会有少许的下沉,因此抛投需借助少许风力,最好在较高的地方抛投,对投手的经验、技术、心理素质也是极大的考验。
3.1.3 无人机的拍摄
在无人机顺利升空后,由飞机控制系统(简称飞控系统)控制飞机沿着规划好的路线飞行,地面站电脑通过数传电台监控飞机在空中的飞行情况,如果飞机飞出有效工作范围或失联时间超过预设值,飞控系统将会控制飞机返航。
3.1.4 无人机的降落
F300无人机有伞降和滑降两种方式,滑降对地面要求较高,通常用伞降方式。无人机顺利降落后检查机身及相机安全,取出相机检查影像图片的质量,然后采取快拼软件将采集的影像数据拼接,检查外业飞行质量。
3.1.5 像片控制测量
像控测量采用GNSS RTK进行测量,像控点一般选择既能在影像上容易辨别又能在实地准确测量的明显地物点、接近正交的线状地物交点、地物拐角点或固定的点状地物上,或者在测区范围内均匀分布撒上1.6米长的白灰十字图形。利用奥维地图软件提前规划好测区的布点路线,逐点施测。
3.1.6 影像图调绘
影像调绘采用内外业结合的方法作业,对测区内居民地、水系设施、交通设施、植被土质、管线设施等进行调查和测量。
3.2 内业
3.2.1 空三加密
使用飞马无人机管家软件完成空三加密和DEM、 DOM的制作。先在智检图模块完成航飞质量的检查和评估,在智理图模块完成无人机数据预处理,提供畸变纠正、影像匀色、金字塔创建等功能,在智拼图模块完成影像自动拼接。以飞马F300为例,步骤如下:

(1)下载无人机、基站等原始数据,进行数据预处理。
(2)创建工程,导入影像文件和POS数据。
(3)连接点匹配,特征点提取和匹配。
(4)控制点量测,进行平差计算和平差优化,平差优化结束后检查空三报告中的精度统计,如精度满足规范要求可进入下一步,如不满足规范要求,则可进行控制点的调整,重复平差优化功能,直至精度符合要求,如精度始终满足不了要求,需检查原始数据和预处理数据等。
(5)输出空三成果,导出DOM和DEM成果数据。
3.2.2 内业成图
使用清华山维软件进行内业成图,将DEM成果(DSM)和DOM导入清华山维软件,建立三维模型,在三维模型上进行内业测图,绘制地物、提取高程点,将地物导出成cad格式,在cass里面整理出图。
四、成果精度分析
4.1 空三精度评价指标
区域网平差的精度通过野外观测的检查点进行评定,根据解算出的外方位元素和检查点的像点坐标,求出检查点地面坐标的解算值,计算与实测坐标值的差值。检查点的平面中误差、高程中误差分别按公式计算:
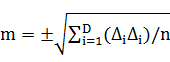
式中,m为检查点中误差;Δ_i为检查点野外实测坐标值与解算值的差值;n为检查点的个数。
4.2精度评定
测区一(拉西瓦镇测区)飞行了两个架次,每个架次4条航线,470张像片,影像航向重叠约77%,旁向重叠约62%。相对飞行高度为780米,航摄地面分辨率为0.12米,测区航线规划图如图1。测区二(南干渠受水区林地典型地块测区)飞行4个架次,总共1193张照片,影像航向重叠约76%,旁向重叠约63%。相对飞行高度为750米,航摄地面分辨率为0.12米,测区航线规划图如图2。
图1 测区一航线规划图
图2测区二航线规划图
2个测区的精度检查结果如表1和表2所示
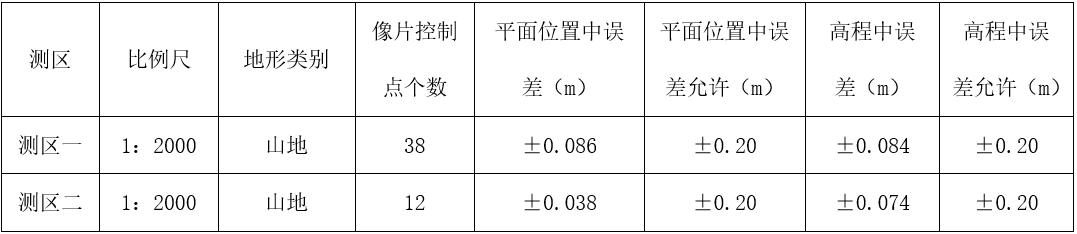
表4-1像控点精度统计
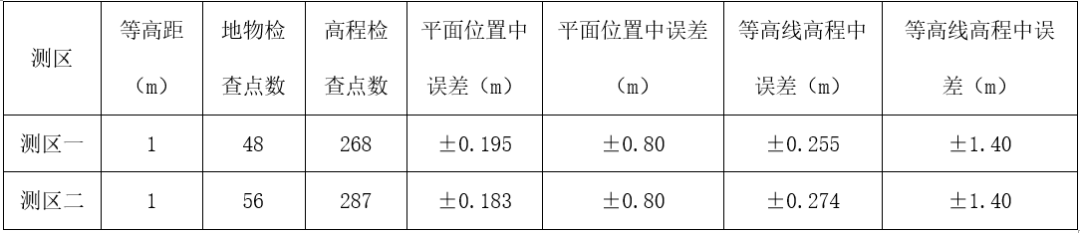
表4-2地形图成果精度统计
由表1和表2可知,像控点精度满足规范要求,每个测区都进行了地形点和地物点的检查,检查结果满足1:2000成图要求。
五、经验总结和结论
按《水利水电工程测量规范》(SL 197-2013)限差要求,本次成果满足规范要求,达到了1:2000地形图的精度指标。本次成图在短时间内完成了较大的任务,给水工、地质等专业争取了宝贵的时间,也为无人机航测技术积累了经验。通过几个测区的飞行任务,得出以下的结论。
(1)无人机航摄技术的生产效率提高明显,节约成本,提高了经济效益。
(2)前期控制测量需做好,像控点尽量布设均匀且保证足够的密度。
(3)高精度DEM提取地貌数据的方法是可行的,极大的节约了人工成本。林地典型地块DEM数据需进行编辑,外业尽量多实测些地形点,结合EPS内业立体测图软件,使成果精度满足规范要求。
(4)可以得到测区的DOM成果,测区地形地貌直观的展现在其他专业人员面前,使其更方便的进行设计。
-
数码相机
+关注
关注
2文章
441浏览量
38399 -
数据处理
+关注
关注
0文章
601浏览量
28579 -
无人机
+关注
关注
230文章
10454浏览量
180728
原文标题:无人机航测技术在引黄济宁调水工程中的应用
文章出处:【微信号:feimarobotics2015,微信公众号:飞马机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
行者X500多旋翼无人机在地形测绘作业中的优势
特信无人机反制 无人机干扰系统:守护蓝天的科技利剑
无人机信号传输技术的原理及分类
特信无人机反制|无人机反制先锋:探索反无人机系统与设备厂家的核心技术
揭秘无人机反制系统:如何精准检测无人机
调水工程管网远程监控管理系统解决方案
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
知语云智能科技:反制无人机新篇章—全景监测与激光打击的尖端技术
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
针对无人机成像应用的镜头设计






 工商网监
工商网监
评论