 从谷歌开始,自动驾驶的发展被推上了世界的舞台
从谷歌开始,自动驾驶的发展被推上了世界的舞台
自动驾驶已经有65年的历史, 1948年称之为现代巡航的发明,开始尝试控制车辆,可以称之为第一个自动驾驶。
1980-1995年期间,在欧洲、美国大学,甚至戴姆勒,做了非常多自动驾驶的贡献,同现在的自动驾驶车一样,他们也组建车队,或跨越欧洲,或穿越美国。那时的传感器体积大,车辆造价昂贵,完成的挑战和任务同今天的很像,只不过人为干涉比现在多一点。
这次大的变化发生之后,有很多ADAS系统开始慢慢出现在市场上。2000年之后,美国军方挑战赛,智能驾驶能做的更多,从谷歌开始,自动驾驶的发展被推上了世界的舞台。
国内自动驾驶从2014年开始起步,无数创业公司涉足这个领域。在谷歌等互联网企业的冲击之下,造势者纷纷提出自己的目标,第一个有限的自动驾驶出现在2020年,全自动驾驶在2030年即将到来。
这些目标能实现吗?
行业共识形成
在2015年的时候,谷歌和传统的OEM差异在于,前者直接从L4级的自动驾驶开始研发,并认为这样的自动驾驶才是能落地的形态,而后者则是从L0、L1开始,认为在无人驾驶真正实现之前,低等级的自动驾驶无法跨越。
特斯拉、Uber、奥迪、凯迪拉克在量产的自动驾驶中,走的最快,但发生的事故给业界带来了不小的震动。不同等级的自动驾驶商业化落地预期,也在悄无声息的延后。
欧菲智能车联驾驶事业部算法及自动驾驶总监段勃勃认为,从技术实现和商业化难易程度来看,商用车比乘用车容易。
商用车的自动驾驶,无论是智能车队,还是限定园区下的运行,体现的特点是:任务复杂度还是L4,只是场景复杂度进行了区分和限制,比如说矿区、港口、园区、封闭高速路等等。
乘用车自动驾驶的着力点主要在L2到L3之间,整个任务复杂度、场景和功能是被限定的。随着这个度的逐渐开放,车辆能提供的服务也越来越丰富,越能满足消费者的期待。
而对于乘用车L4,业内普遍有了共识,技术实现、大规模商业化会稍微远一点,当下人们更关注的是功能、产品的落地能力,商用车的限定条件下的L4自动驾驶,和乘用车的L3及以下的辅助驾驶成为热点。追本溯源,还是因为落地必须技术、商业、法律都满足之后才行。
OEM积累核心竞争力
段勃勃表示,面对这样的形势,传统的OEM会联合Tier1完成一个功能的开发,Tier1要把IP供应商、工程服务、GPU集成在一起,承担非常多的任务。这个阶段,OEM的压力稍微小一点,但OEM也有自己的焦虑。
当互联网造车势力涌现,同传统OEM一样可以采购Tier1的零部件,实现类似的功能、汽车,二者的差异化在哪里?
真正的核心技术掌握在Tier1手中,差异化很难体现,同质化的竞争非常多。因此现在趋势是OEM开始加大研发投入,它要逐渐充当主动的角色,特斯拉、沃尔沃、通用都在尝试做这样一件事情。
现在OEM也承担自动驾驶的开发集成,而且它会有专利的创新。过去可以找到供应商把功能完整copy,现在很难,OEM有自己的软件、集成、专利,在未来会发生的更加明显。
OEM为了发展,也在积累架构能力、软件能力,算法能力的核心技术。比如多域控制器,将会把所有的传感器集成在一起,完成任务和功能。
在段勃勃看来,供应商给OEM提供零部件,OEM做集成控制,供应商就是供应商,真正做控制的可能以软件的模式来实现。OEM的需求在变,相应的产业链也在发生变化。
未来OEM和供应商的关系,可能会是一对多的关系,一个OEM会直接对应IP Tier1、控制器的Tier1,供应链关系更加扁平。Tier1与Tier1之间,将会出现更多密切的合作,这也在给Tier1提出新的挺挑战。
OEM和供应商之间是灵活合作的模式,不同的OEM拥有的能力不同,软硬件实力不同,需要供应商提供的服务也就不同,供应商工程服务的能力要提升。只有这样,在整个开发的周期被压缩短后,配合OEM交付才能顺畅。原来找供应商难,未来更难。
段勃勃表示,现在OEM开发一款车的周期也正在变短,以前先成熟后上市,现在可以先发布,再OTA升级,这样的案例以后越来越普遍,因为这是竞争、发展变化的需要。
2015年欧菲智能车联开始投入智能驾驶的领域,专注于环视系统来做ADAS及无人驾驶技术。
目前,公司环视摄像头已经实现低成本,高收益。技术上目前在国内已经实现L2等级的自动驾驶,接近L3的落地,2019年会有一些L2、L3功能的量产。
2016年9月摄像头产品上市,2017年9月,360度环视系统上市,在2018年6月第一款高清环视上市,第一款AI泊车系统将于2019年Q1完成上市。还有融合方案的全自动泊车,能够适应多场景,于Q4能够达到量产,已经拿到国内非常重要的两家主机厂的项目。
成立三年多,欧菲智能车联积累了十个OEM客户,约40个工程定点,完成十几个SOP的项目。
技术的挑战
在段勃勃看来,随着产业链的成熟,技术的升级,曾经越来越多的不可能正在变为现实。
以低光照下地下停车场的泊车系统为例,光照在20lux左右,通过特殊选型的sensor可以做到L5,以及高精度的相机模组,在可控范围内就可以完成泊车。
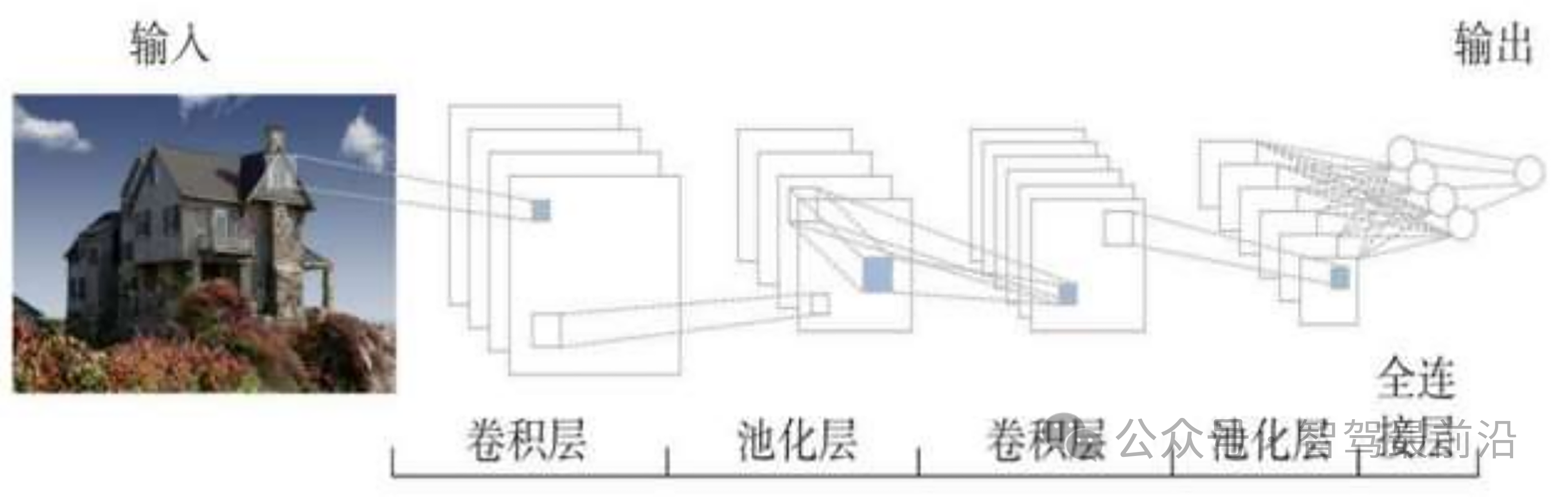
深度学习的重要性会越来越大,其算力也会同步摄像头的发展而升高。对于深度学习,目前的挑战在于单位算力下的功耗降低,面对不同数据模型,计算模型的适配性。
比如,针对不同的目的,数据来源不同,数量也不同,与之匹配的数据筛选、处理也千差万别,而后端数据采集、标注的能力还未跟上。以及,为了适应车内的工作环境,稳定性、可靠性都还有待验证。
-
传感器
+关注
关注
2550文章
51034浏览量
753042 -
adas
+关注
关注
309文章
2183浏览量
208627 -
自动驾驶
+关注
关注
784文章
13784浏览量
166372
原文标题:成立三年,拿下10+ SOP,视觉ADAS还有更多可能 | GGAI头条
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
从特斯拉看智能驾驶未来发展
Waymo利用谷歌Gemini大模型,研发端到端自动驾驶系统
自动驾驶汽车安全吗?


浅谈自动驾驶技术的现状及发展趋势

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
中级自动驾驶架构师应该学习哪些知识
初级自动驾驶架构师应该学习哪些知识
未来已来,多传感器融合感知是自动驾驶破局的关键
自动驾驶发展问题及解决方案浅析
Waymo自愿召回444辆自动驾驶汽车 L4的自动驾驶还有很多路要走






 工商网监
工商网监
评论