 集成式的ECU的方案会取代L1、L2级辅助驾驶的分离式方案
集成式的ECU的方案会取代L1、L2级辅助驾驶的分离式方案
随着汽车智能化、网联化、电动化、分享化的快速推进,汽车电动化和自动驾驶成为当下最热的话题,也是最紧迫的技术需求。
基于四化背景的推动有很多车厂已经投资了纯电动汽车的平台,这样全新的架构促进了座舱电子和自动驾驶整个技术的发展进步。
因为不受传统的汽车平台的约束,所以在汽车电子里面ECU的整合、集成也会以更快速度推进。此外,自动驾驶的不断演进也正在推动座舱电子ECU的整合、集成。
“现在基于车厂开发L3-L5级自动驾驶技术的背景下,需要有更多的冗余设计,所以集成式的ECU的方案会取代像辅助驾驶、L1、L2级辅助驾驶的分离式方案,我们更需要的是L3以上的集成式的ECU方案”。伟世通中国区业务战略与市场副总裁蔡莉莉表示在高工智能汽车年会上表示。
汽车座舱从数字化、车联网到未来的自动化发展趋势,以及现在L3级自动驾驶技术的不断推进,将会极大地推动汽车座舱电子电器的架构。
当下汽车电子ECU整合从传统的上百个独立的ECU模块,到整合到座舱电子、域控制器、自动驾驶域控制器是一个快速演进的过程。中央域控制器的作用是为了在2024年以后实现冗余计算的平台做一个过渡和铺垫。
为什么要用域控制器?蔡莉莉表示,域控制器一方面可以降低成本、重量和能耗。另一方面受益于芯片和软件的开发能力、计算能力越来越强,综合整个技术,使用域控制器也是必然的发展趋势。
面对这样的趋势,伟世通在这个领域里也采取了新的措施来应对行业发展需求,推出了第一款Smartcore™并引领了域控制器在整个汽车行业的趋势。
作为首款车规级智能座舱电子整合方案,Smartcore™通过在一个多核系统芯片(SoC)上运行多个独立操作系统,包括驾驶信息、抬头显示、信息娱乐系统、高级驾驶辅助、车联网等,帮助汽车制造商对座舱内的信息显示进行集中规划。
根据知名市场调研机构预测,到2025年,高速公路自动驾驶和拥堵道路的自动跟车以及ACC等场景和使用需求将会呈现一个爆发式的增长,其中L3级自动驾驶量产落地最早也要到2025年之后。
我们知道L3-L5级的自动驾驶是需要非常强大的中央计算能力,所以从2023-2024年以后,无论是OEM厂商还是供应商都必须要从冗余计算平台实现向中央集成计算平台的转移。
蔡莉莉认为,这在当下已经是一个非常清晰的技术路径,现阶段的架构过渡到后面,SOA是必然的趋势,平行计算、安全冗余这都是后面重点考虑的方面。
在可升级性和重复利用方面,伟世通的座舱电子可以做到软硬件完全互相独立,基于强大的硬件平台,可以把升级、OTA、数据迁移、动态扩展、冗余等操作贯彻在整个运行过程中。
接下来,ASIL的相关功能都可以通过OTA升级,云计算和边缘计算未来在这上面将会扮演重要的角色,这其实也是软硬件分离的发展趋势,无论是对于车厂还是运营商来讲都是具有非常重要的意义。
-
OEM
+关注
关注
4文章
401浏览量
50331 -
汽车ECU测试
+关注
关注
3文章
7浏览量
8296 -
多域控制器
+关注
关注
1文章
6浏览量
2994
原文标题:自动驾驶的不断演进,正在推动座舱电子ECU的整合、集成 | GGAI视角
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
电路L2电感接上后锂电会短路是啥情况
基于GD32L235系列MCU的土壤湿度检测带磁力翻转式显示方案

华为智能汽车解决方案BU CEO靳玉志畅谈L3级智能驾驶及规划
BK1661 全集成的单芯片 L1 频段 GNSS 解决方案
BK1662 单芯片L1/L5双频GNSS解决方案
BK1616P 全集成的单芯片 L1 频段 GNSS 解决方案(高性价比FLASH版本)
前图森未来中国CTO王乃岩加入小米汽车,助力自动驾驶发展
长安UNI-Z上市,定价11.79-13.19万元,标配L2级自动驾驶系统
请问使用ST25R3916方案的NFC读卡器能否通过EMVCo 3.0 L1认证测试?
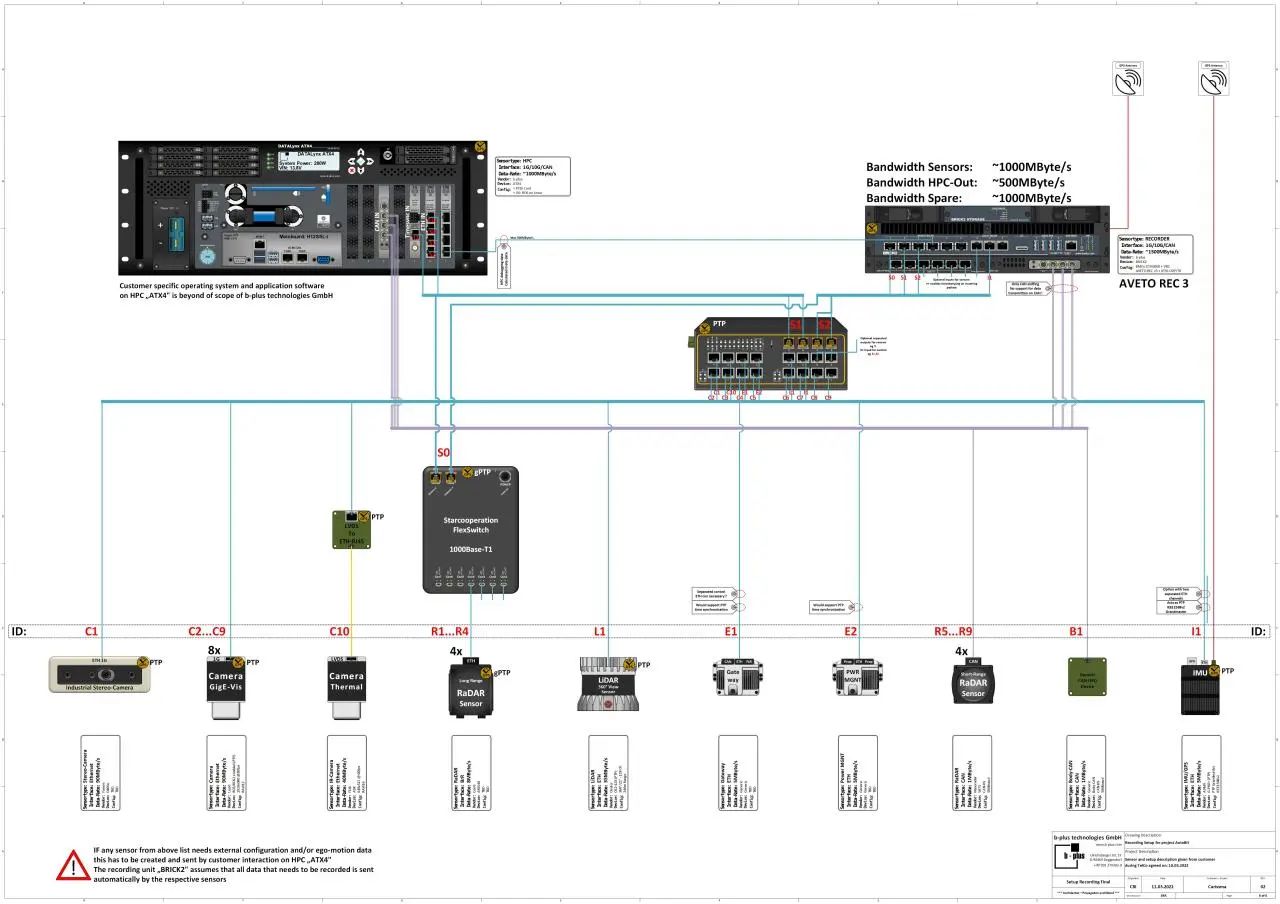
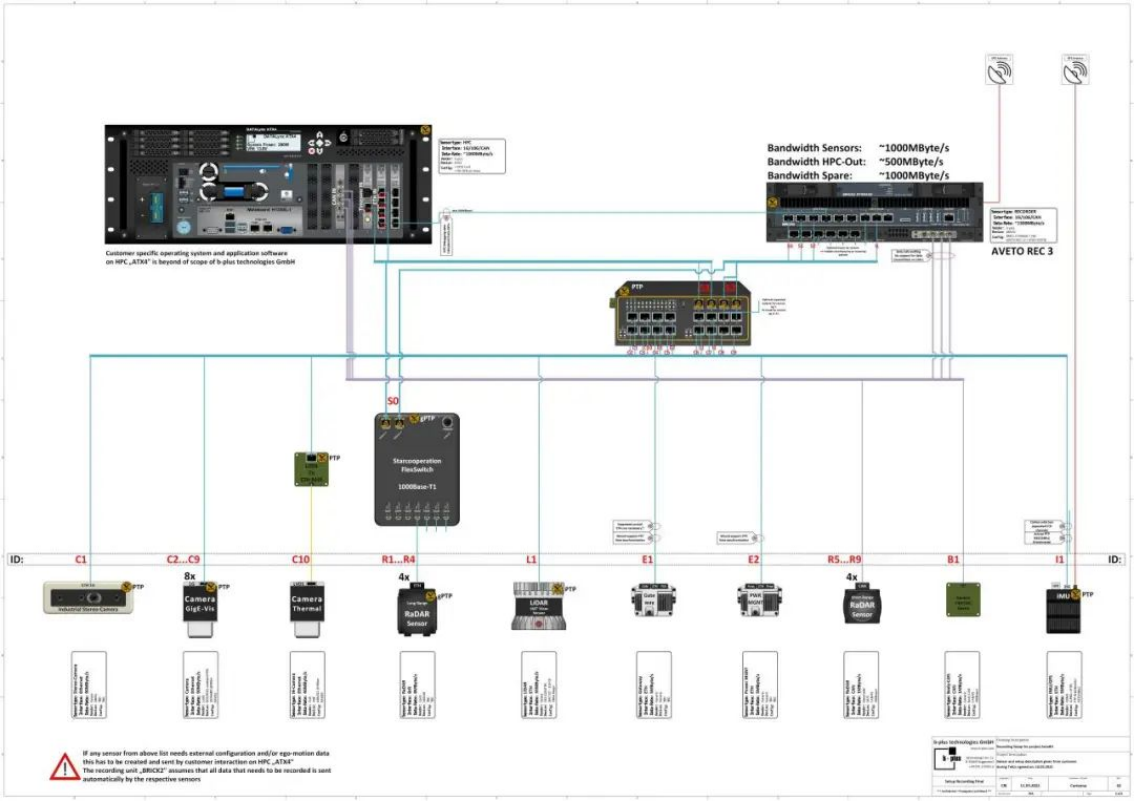
康谋方案 | L2进阶L3,数据采集如何助力自动驾驶





 工商网监
工商网监
评论