 Civil Maps突破了用传统的光栅图像或点云数据来生成地图的方法
Civil Maps突破了用传统的光栅图像或点云数据来生成地图的方法
Civil Maps 突破了用传统的光栅图像或点云数据来生成地图的方法,走出一条自己的路。
高精度地图是自动驾驶中不可缺少的一环。不仅是它本身可以看是一个超视距的传感器,而且配合高精度地图的高精度定位技术在高级别自动驾驶中尤为重要。
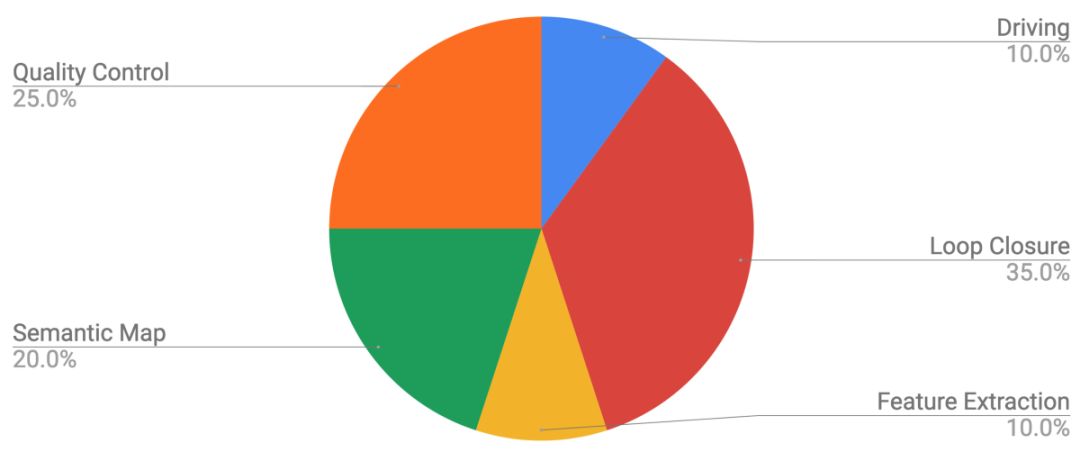
高精度地图是个极其烧钱的行为,暂且不提后续的地图内容制作与分发等,单单是设备齐全数量足够的测试车队就能让很多意图进入这个行业的公司望而却步。在进行成本分解后,高精度地图制作的大部分成本来自驱动物流,数据管理,循环闭包,特征提取,语义数据和云处理费用。
传统图商一般是利用光栅图像或点云数据作为他们的基础地图层,数据量非常庞大。在复杂的数据管道中,可能会遇到四种不同类型的计算瓶颈。这些计算瓶颈可能是由于内存,CPU,网络或存储造成的。而Civil Maps平台基础地图比传统地图小了一万倍。
Civil Maps 为自动驾驶汽车开发了首个基于边缘的高清制图和本地化平台。它凭借先进传感器融合,六自由度(6DoF)指纹定位和Edge Mapping™的新技术,允许汽车OEM、制图提供商和移动公司加速其自动驾驶计划。
地图绘制实际上涉及三个不同的层:首先是基础地图,然后是一个向量层,它用来描述形状;其次是一个语义层。向量层和语义层需要尽可能频繁地进行更新,最终目标是接近实时更新,要做到这一点,大多数的选择是众包:当自动驾驶汽车沿着道路行驶,将实际感知到的数据与基本地图进行比较,然后将差异化的数据上传回到云端,只要有足够多的车辆在这么做,就可以拥有足够的覆盖率。
基础地图无法众包,必须派一辆测量车去收集基础地图数据,然后上传到云端,再通过自动处理或者人工的方式来进行标注和修改,然后发布。
因此,创建基础地图的数据量相当庞大,因为它们都是由原始的3D激光雷达点云或光栅图像构建在云端的。而Civil Mpas生成基础地图的方式略有不同,使用AI算法来删掉除所需传感器之外的所有数据,进而创建“指纹基础地图”,这样上传到云端的数据要小很多。这套技术允许在三个地图层中均使用众包的方式进行数据更新。这是Civil Maps成本低的原因之一。
在2018年国际消费电子展上,Civil Maps推出了一款名为 CityScaleHDMaps 的新产品,并展示了实现城市规模高清制图业务的一些核心功能。
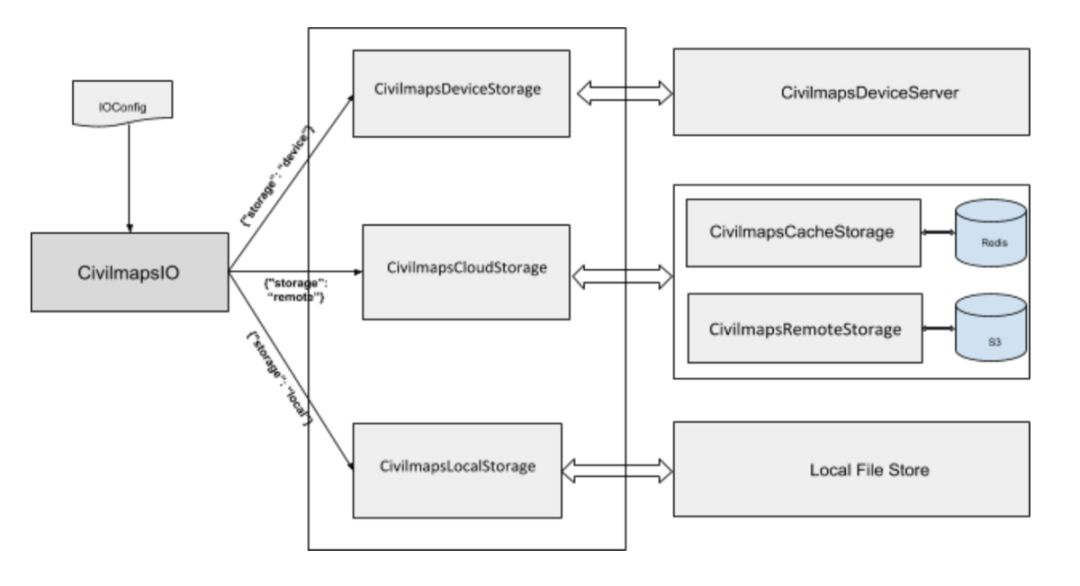
CityScaleHDMaps 的存储框架是3种不同类型系统之间的复杂抽象。首先将Redis用作内存缓存,这是将数据移入CPU的L1和L2缓存或GPU内存的最快方法之一。Redis上面的第二层是边缘分布式文件系统,它使用Ceph在我们的私有云中通过网络在服务器之间移动数据,最后我们与AmazonSimpleStorageService(S3)同步,在所有边缘站点上拥有持久的分布式存储。存储抽象是开发人员读取和写入数据管理层的无缝接口。能够快速更改技术或数据同步架构,而不会影响应用程序层。通过抽象,重构的代码变得很少。
传统上,LoopClosure管道使用地面控制点将点云锚定到参考点,该参考点建立特定特征和对象的地面真实位置。这些地面控制点通常由专业测量员收集。在CivilMaps,利用机器视觉技术实现了闭环的自动化,实现了5CM的全球地理定位精度。
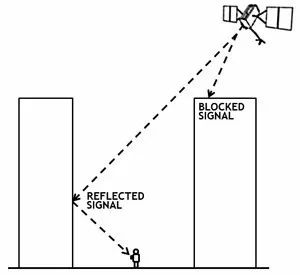
RTK GPS传感器在复杂的城市环境中无法生成可靠的位置信息。传感器数据在穿过城市某些地方会漂移,这会产生复杂性。通常,高层建筑会为GPS创建多路径问题。即使使用差分GPS天线,性能也很差,特别是在旧金山这样的城市。
除了RTK GPS之外,还有传感器融合技术使用视觉里程计融合相机,LiDAR和IMU传感器来创建校正轨迹。然而,由于GPS信号不良,IMU传感器本身的输入质量非常差。这种方法有其局限性,充其量只是对现实世界中地面实况位置的估计。
CivilMaps 引入了一种新颖的循环闭合方法和技术。利用机器视觉,同时使用航空影像和航空LiDAR作为参考共享坐标系。这更有利的原因是由于惯性系统在飞机上,而不是在高层建筑旁边的地面上。如果惯性系统在天空中,并且上面的卫星具有清晰的视线,则GPS误差和IMU漂移会大大减少。从而获得非常精确的轨迹信息,可以使用30-50个地面控制点对大约1,000线性公里的道路网络进行校正,而陆地唯一的环路闭合则是每100米一次。这是地面实况要求的一个数量级减少。CivilMaps利用航空三角测量的航空数据集来创建一个非常准确的共享坐标系。共享坐标系是地面实况地理参考数据集,它能够融合来自多个源的点云。
驾驶飞机获取高精度低分辨率点云数据,这只是创新的一部分。利用图像和激光雷达的组合,通过寻找空中点云和地面点云之间的共同特征来获得XYZ校正。得到修正后,将修正融合到里程轨迹中,得到精度为5cm的修正轨迹。
很少有地图绘制公司可以声称精确度达到5厘米,目前基于地面控制和复杂RTK轨迹的大多数基础地图的精确度在15厘米到25厘米之间。然而,使用地面RTK的精度测量在复杂的城市环境中是不可信的。地面ONLY方法不起作用,有太多变量可能会破坏传感器融合或验证方法的质量。RTK协方差的误报是导致传感器融合质量差的首要原因。RTK的协方差不可信,因为生成轨迹的解决方案基本上是衡量它自身的准确性。
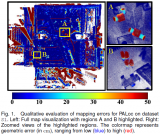
CivilMaps 发布的视频中,在相互正交地比较独立的数据集,其中一个被证明是高度准确的,不容易受到GPS漂移的影响,因为树木、建筑物或加速度的快速变化。通过这种方法,将每次地面旅行集成到通过航空图像+航空激光雷达数据集创建的共享坐标系统中,以创建一流的基础地图。这为创建可伸缩的城市高清地图提供了新的可能性。
循环闭合后,CivilMaps继续进行特征提取,将地图划分为单独的地理空间区域。通过AirFlow使用mapreduce;各个docker容器获取在循环闭包后发布的参考点云数据以提取功能。此特征提取过程提取相关的通道特征和几何,以创建地图所需的矢量几何图形。
创建矢量图层后,在Unity中使用3D光线投射的单独作业会创建相邻的通道语义。最后发布到Web服务中以供使用。城市规模的高清地图由于其大尺寸而可以是几兆兆字节的数据。CivilMaps将HD地图中的原始点云数据称之为指纹基础地图的数据。指纹基础地图是原始点云数据的编码版本,比原始点云数据小10,000倍。。
通过“6D定位”,即6个自由度,因为汽车将知道它的运动轨迹,也知道它的当前姿态。有了这些信息,汽车就可以定位自己,然后将对应的地图数据投射到传感器的视场中,传感器就可以把注意力集中在特定的区域,而忽略其他区域。Civil Maps认为这样做的好处是,知道要看哪里可以节省汽车的计算时间和计算资源,否则就需要反复重复对周围环境进行识别以及与地图进行对比的过程。
Civil Maps使用的增强现实标注方式也是现在大家的常用方式,这种方式相对于激光点云数据,更容易被常人理解。Civil Maps并没有使用昂贵的GPU,而是在ARM Cortex上就可以运行这套程序。目前该公司已获得福特汽车公司,上汽集团,Motus Ventures,Stanford-StartX 基金以及许多其他杰出投资者的资助。
-
传感器
+关注
关注
2552文章
51228浏览量
754653 -
自动驾驶
+关注
关注
784文章
13867浏览量
166597 -
高精度地图
+关注
关注
1文章
18浏览量
3062
原文标题:基于边缘的自动驾驶导航定位公司Civil Maps实现了5cm城区高精定位
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
具有连续调制光栅区域的光波导优化
用于SLAM中点云地图综合评估的开源框架
AIGC与传统内容生成的区别 AIGC的优势和挑战
基于深度学习的三维点云分类方法







 工商网监
工商网监
评论