 如何实现PID回路的最优性能
如何实现PID回路的最优性能
在工业自动化行业,尽管大部分人将比例-积分-微分 (PID) 算法作为闭环过程控制的事实标准,但优化PID回路以达到最优性能的最佳方法,仍然没有达成共识。这些实践在概念上很简单:选择用于定义总体控制量的比例、积分和微分的相对大小的增益、速率和重置参数。
在实践中,回路整定与其说是科学,不如说是艺术。优化参数的最佳选择取决于各种因素,包括受控过程的动态行为、运行人员确定的性能目标以及运行人员对调节工作方式的理解。已经开发了各种手动技术,来帮助运行人员调整其回路,但即使在专业软件的帮助下,回路整定也可能是一项艰难而耗时的差事。
“自动整定”或“自整定”PID控制器旨在简化问题,方法是根据对受控过程行为的某种自动分析来选择自己的调节参数。这些自动过程,通常涉及过程输入/输出之间关系的数学模型,经验丰富的运行人员提供的信息可以改进这些数学关系 (参见图 1)。
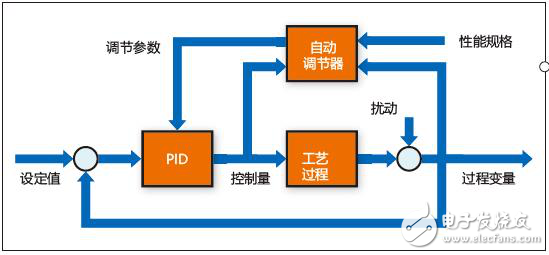
图 1:自动调节PID 控制器,通过测量过程输入 (控制量) 和输出 (过程变量),然后更新其自己的调节参数,以满足运行人员对闭环性能的要求。
“自整定” 指的是那些在控制器在线调节工艺过程时持续执行的程序。"自动整定" 是指控制器处于离线状态时按需执行的过程。但是,这两个术语通常互换使用,因为自整定和自动整定控制器都可以自动调整自身。为了简单起见,在下文中,这两个词用"自动调节器"代替 。
步进测试
在调试回路的过程中,自动调节器可以简单的自动执行操作员可能需要手动执行的调整程序,例如,在控制活动中强制一个波动、观察结果并相应调整参数。但是,自动调节器在执行这些步骤时会有所不同。
例如,最基本的自动调节器可以执行经典的“步进测试”或“阶跃测试”,在这种情况下,控制工作会以循序渐进的方式改变,并禁用反馈。从理论上讲,该过程对阶跃输入的响应,将提供足够的信息来表征过程的动态行为,这反过来又会决定调节参数。然而在实践中,对于那些在所有时间内必须将过程变量波动降至最低的应用中,仅仅为了调节控制器而为过程引入阶跃扰动,是不切实际的。
某些自动调节器在执行步进测试时,可以通过响应设定值的变更来避免此类问题。无论如何,进程都会受到干扰,在试图推动过程变量向新设定值变化的过程中,控制器可以承担在进程中较小的阶跃变化。
例如,当运行人员请求更改设定值时,控制器应施加100% 的控制量 (正步骤),然后在过程变量到达新设定值 (负步骤) 之前关闭。然后,控制器就会检测到过程变量中的波动,以确定过程行为的数学模型(请参阅图2 中所示的步进测试)。

图 2:对于某些应用程序,如果该过程以可预测的方式运行,那么设定值的微小变化,就足以识别过程行为。执行设定值响应测试的自动调节器,会中断控制器对设定值更改的初始响应,以进行两步测试:一个正向测试和一个负向测试。在过程变量完成一个完整变化之后,自动调节器就可以计算出一组新的调节参数,然后重新激活PID算法。当过程变量达到设定值时,控制器已经被调整到运行人员期望的闭环控制,这涉及到回路的上升时间、过冲率、建立时间等因素。
过程的时间常数可以推导出来,或者用从控制器关机到过程变量开始下降之间的时间间隔。然后,可以使用任意的优化规则以及运行人员对闭环性能的偏好,从进程死区时间、增益和时间常数来计算相应的 PID 参数。优化完成后,控制器可以恢复正常的闭环控制操作,将过程变量继续调节到设定值。
噪声和扰动
尽管概念简单,但步进测试对自动化来讲可能也是一个挑战。如果在测试过程中,过程变量发生扰动,则结果会被扭曲。经验丰富的运行人员,在执行手动步进测试时,通常可以识别正在发生的干扰,或者等恢复正常后再启动测试或在必要时重新启动测试。赋予自动调节器类似的观察技能则非常难。
当过程变量受测量噪声的影响时,该问题尤为严重。自动调节器并不是总能区分虚假噪声和真实扰动。即使可以区分,测量噪声仍可能会破坏响应曲线的精确形状,从而损坏过程模型的计算。
某些自动调节器可以通过多次执行自动步进测试,然后将结果平均或选择最常出现的结果来处理测量噪声。复杂的自动调节器,还可以计算出对过程模型的估计是否能够适应嘈杂的数据,或者报告它在最新结果中的可信度,或者重复测试,直到达到运行人员定义的置信度。
没有万能药
但自动启发式调节也有缺点。如果自动调节器经过训练,无法获得过程行为模式,或者如果进程以完全意外的方式运行,那么自动调节器就会不知道该做什么。基于模糊逻辑或人工智能的启发式自动调节器,虽然能记录运行人员的体验,可以重新对其进行训练以识别新模式,但仍然需要经验丰富的运行人员的帮助,因为在大多数时间,它不能自动完成。
启发式调优也可能需要很长时间和几个迭代才能达到最终结果。另外,启发式自动调节器,在调节参数的度和频率方面倾向于保守,以免导致过调节。
-
控制器
+关注
关注
113文章
16562浏览量
180303 -
PID
+关注
关注
36文章
1475浏览量
86164
发布评论请先 登录
相关推荐
PID回路控制的原理与调试
数控机床的运动控制 怎么快速调出最优PID参数?
二手5720A_租售5720A多功能校准器|Fluke福禄克
基于H∞回路成形的鲁棒PID 参数整定
基于FF现场总线的PID控制应用实现


PID理论详解
求解含储能装置的微电网动态最优潮流的对偶半定规划方法
使用GForce-200PLCCPU222进行PID回路控制的原理与调试





 工商网监
工商网监
评论