 自动驾驶汽车的电源系统能胜任吗?
自动驾驶汽车的电源系统能胜任吗?
自动驾驶汽车,它们不需要一个人类驾驶员坐在方向盘后面(当然,也许会有一个,但并不是从传统的角度实际使用操控机制)。与之相反,相当于人类驾驶员的微型计算 机主机运行大量的计算机代码,与车辆内外各种不同的传感器阵列相连。它们连接至云,并可以完全实时模拟车辆周围的外 部环境,从而根据当前四周的交通情况预期需要采取的行动。 无论气候、环境和交通条件的范围和状况如何,这些操作都会 正常执行。
不幸的是,最近在亚利桑那州发生了一起自动驾驶路测车撞死 骑车人的事故。据当地警方表示,骑车人当时正在人行道以外的地方穿越马路。虽然自行车位于事故现场,但警方并不认为事故发生时,受害者正骑着自行车。受害者被紧急送往附近的医院,并在抵达医院后不久被宣布死亡。
事发时,在自动驾驶SUV的方向盘后有一个人,但是那个人并没有实际操控车辆。据当地官员介绍,事发时车内没有其他乘 客。值得注意的是,亚利桑那州是美国为数不多的州,认定自 动驾驶汽车的驾驶座不需要有人以便必要时接管车辆操控为合法的。然而,这类事故无法增加公众对无人驾驶汽车的自动驾驶能力的信心。
自动驾驶车辆时间表
毫无疑问,尽管自动驾驶汽车在发展过程上会遭遇一些挫折, 它仍在逐步向我们走近。因此,有一些问题值得思考:我们什 么时候真正步入自动驾驶,还需要多久?
根据汽车行业的分析,自动驾驶的变迁路径有两种标准术语: 一种是演进式的,正如当前许多汽车正在逐步推进(类似于特 斯拉的自动驾驶功能);另一种是革命性的,即全自动驾驶汽 车(如谷歌正在研制的)。在我看来,单靠哪种路径取得成功 仍不明朗,但更有可能的结果是两者共生融合。
那么,未来几年会如何发展?以我从一些关键行业的专家那里 获得的相关信息来看,下列领域将进一步发展:
更多高级驾驶员辅助功能,可实现与导航和GPS系统同步。
类似谷歌这样的公司将收集和积累有关自动驾驶汽车可能 遇到的每一种情况的数据。
测绘公司将需要加强主要城市的3D测绘数据支持。
汽车制造商和高科技汽车系统供应商需要彼此紧密合作, 以确保光检测器、激光雷达、雷达传感器、GPS和摄像头协 同工作。
整合了上述功能的汽车必须在所有地形和气候条件下进行 测试。
展望未来,到2020年,配备了上述半自动功能的汽车应当可以 自主驾驶以通过交叉路口、交通信号灯和停车让行等交通条件。 尽管如此,这些高度自主的车辆在紧急情况下仍然需要一个人 类驾驶员坐在前面。预计到2024年,这些半自主驾驶汽车将能 够在更加严苛的条件(如恶劣天气和夜间)下正常行驶。到那 时,Lyft打车服务提供商也许可以开始使用这类汽车,而无需 任何司机。当然,汽车制造商需要确保其汽车能够理解来自路 人的信号,如在过马路时候招手。所有这些发展必然要求汽车 制造商在其车辆上搭载许多自主功能,这样才有可能实现全自 动驾驶汽车在2030年代中期顺利上路。
当然,实现这一时间表所需的所有发展进步将为IC半导体行业 创造大好良机,因为将其付诸实现将要求许多系统增加大量的 硅技术内容。这些硅技术内容将由数字和模拟集成电路(IC)组成。
模拟IC
全自动驾驶汽车显然将配备众多由不同的数字和模拟IC组成的 电子系统。它们将包括高级驾驶员辅助系统(ADAS)、自动驾驶 计算机、自动停车辅助、盲区监测、智能巡航控制、夜间视觉、 激光雷达等,不胜枚举。所有这些系统都需要多种不同的电压 轨和电流电平,以确保其正常工作。它们可以直接从汽车电池 和/或交流发电机供电,在某些情况下,也可以从经由这些电压 轨进行了后级调节的电源轨供电。后者通常发生在VLSI数字IC (如FPG和GPU)的内核电压情况下,此时可能需要小于1 V的工 作电压而电流为几到几十安培。
系统设计人员必须确保ADAS符合车内各种抗噪标准。在汽车环 境中,开关稳压器正在取代那些在低散热和高效率很重要的区 域中的线性稳压器。而且,开关稳压器通常是输入电源总线上 的第一个有源部件,因此对整个转换器电路的EMI性能有着重要影响。
EMI发射有两类:传导和辐射。传导发射通过电线和走线连接到 产品。由于该噪声局限于设计中的特定端子或连接器,因此如 上所述,在早期开发过程中借助良好的布局或滤波器设计,通 常可以相对容易地保证符合传导辐射要求。
不过,辐射发射完全是另一回事。电路板上任何承载电流的东 西都会辐射电磁场。电路板上的每一条走线都是一根天线,每 个铜层都是一个谐振器。除了纯正弦波或直流电压以外,任何 其他东西都会在整个信号频谱上产生噪声。即使精心设计,在 系统进行测试之前,电源设计人员也并不真正知道辐射发射会 有多糟糕,而辐射发射测试只有在设计基本完成之后才能正式 进行。
常常使用滤波器来衰减特定频率或一定频率范围的信号强度, 从而降低EMI。通过空间传播(辐射)的这部分能量可通过添加 金属和磁屏蔽来衰减。位于PCB走线(传导)的能量部分可通过 添加铁氧体磁珠和其他滤波器来抑制。EMI无法消除,但可以衰 减到其他通信和数字器件能够接受的水平。此外,多家监管机 构通过实施相关标准来确保合规。
鉴于本文所述的应用限制,ADI公司Power by Linear™部门开发出 LT8650S——一款支持高输入电压、单芯片、低EMI辐射的同步 降压转换器。该器件3 V至42 V输入电压范围使其成为汽车应用 (包括ADAS)的理想选择,因为汽车应用必须胜任冷启动和启停 场景下的调节,最低输入电压低至3 V,电源切断瞬变超过40 V。 如图1所示,该器件采用双通道设计,由两个高压4 A通道组成, 提供低至0.8 V的输出电压,从而可以驱动目前市场上电压最低 的微处理器内核。开关频率为2 MHz时,其同步整流拓扑可实现 高达94.4%的效率,而在空载待机条件下,突发工作模式(Burst Mode®)保持静态电流低于6.2 µA(两个通道都打开),因此非常 适合始终开启的系统使用。
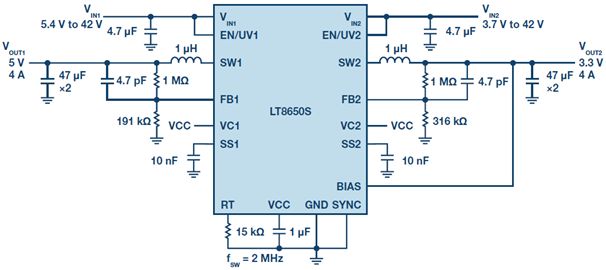
图1. 2 MHz时提供5 V、4 A和3.3 V、4 A输出的LT8650S简化原理图。
LT8650S的开关频率可以在300 kHz到3 MHz范围内进行编程,并 且在整个频率范围内都支持同步。低至40 ns的最短导通时间可 在开关频率为2 MHz时,在高压通道上实现16 VIN到2.0 VOUT的降压 转换。其独特的Silent Switcher® 2架构使用两个内部输入电容以 及内部BST和INTVCC电容,以将热环路面积减至最小。结合严格 受控的开关边沿和集成接地层的内部结构,并用铜柱代替键合 线,LT8650S的设计大大降低了EMI/EMC辐射。
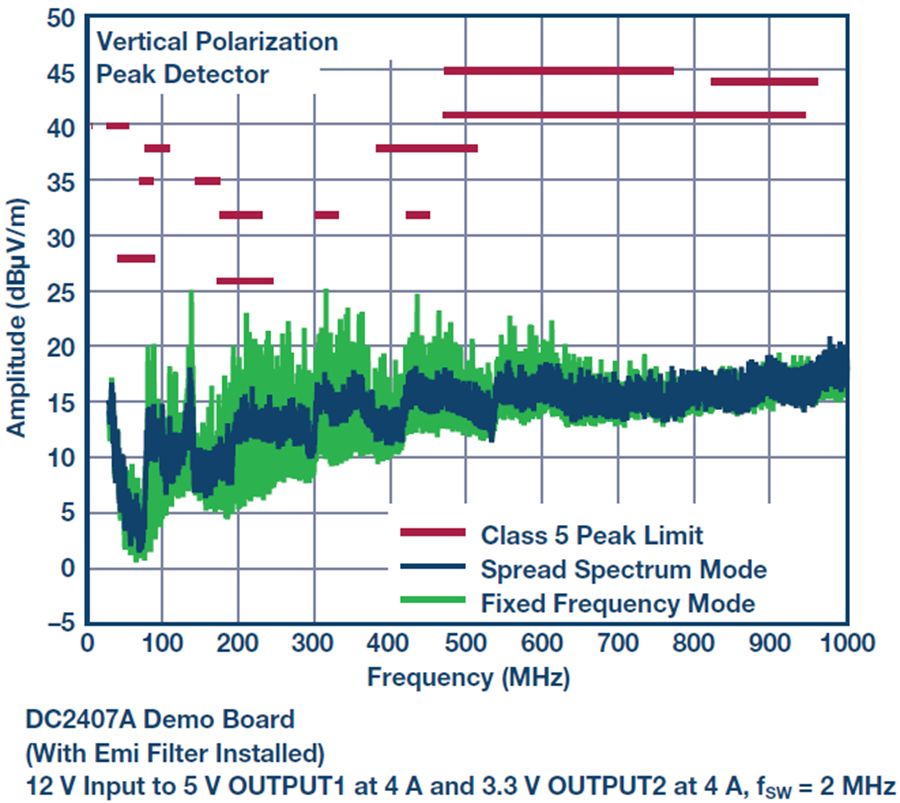
图2显示了输出辐 射的特性。改进的EMI/EMC性能对电路板布局不敏感,即使使 用2层PCB时也是如此,从而可以简化设计并降低风险。在整个 负载范围内,开关频率为2 MHz时,LT8650S可以轻松符合汽车 CISPR 25、Class 5峰值EMI限制。还可以使用展频(SSFM)进一步降 低EMI水平。
LT8650S内置上下高功率开关,并将必要的升压二极管、振荡 器、控制和逻辑电路集成到单个芯片中。低纹波突发工作模 式可在低输出电流下保持高效率,同时使输出纹波低于10 mV p-p。最后,LT8650S采用小尺寸散热增强型4 mm×6 mm IC引脚 LGA封装。
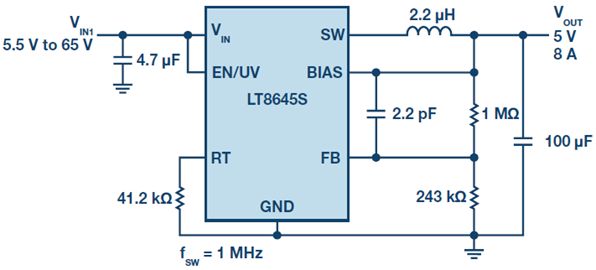
同样的,对于需要比LT8650S提供的输入范围更宽的应用,我们 还开发了LT8645S——一款支持高输入电压、单芯片、低EMI辐 射的同步降压转换器。其输入电压范围为3.4 V至65 V,因而既 适合汽车应用,也适合卡车应用,这些应用必须胜任冷启动和 启停场景下的调节,最低输入电压低至3.4 V,电源切断瞬变超 过60 V。如图3所示,该器件采用单通道设计,提供5 V、8 A输 出。开关频率为2 MHz时,其同步整流拓扑可实现高达94%的效 率,而在空载待机条件下,突发工作模式保持静态电流低于2.5 μA,因此非常适合始终开启的系统使用。
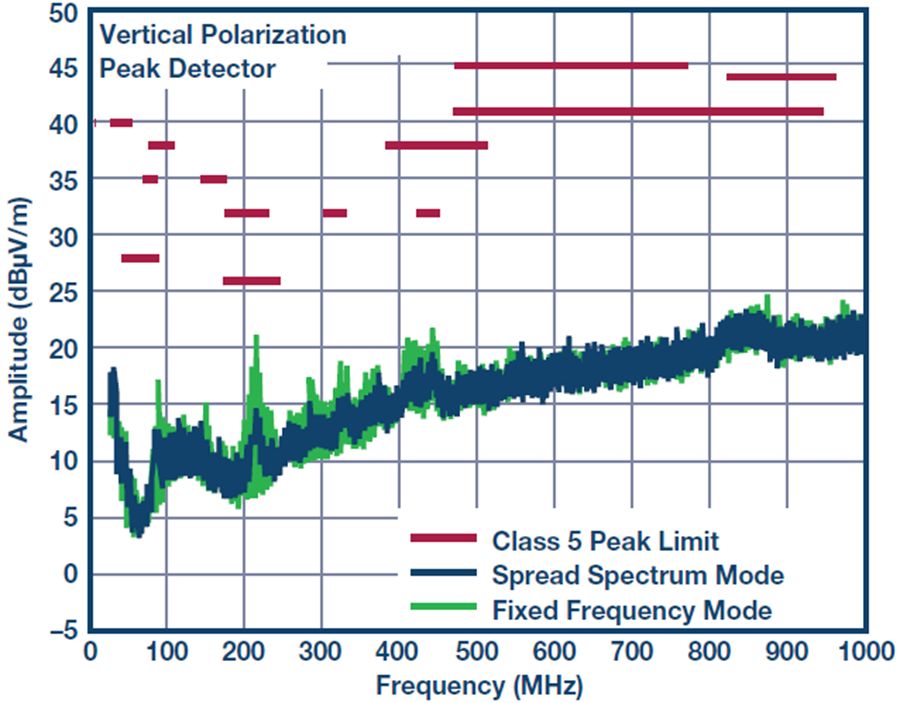
LT8645S的开关频率可以在200 kHz到2.2 MHz范围内进行编程,并 且在整个频率范围内都支持同步。其独特的Silent Switcher 2架 构使用两个内部输入电容以及内部BST和INTVCC电容,以将热环 路面积减至最小。结合严格受控的开关边沿和集成接地层的内 部结构,并用铜柱代替键合线,LT8645S的设计大大降低了EMI/ EMC辐射。图4显示了输出辐射的特性。改进的EMI/EMC性能对 电路板布局不敏感,即使使用2层PCB时也是如此,从而可以简 化设计并降低风险。在整个负载范围内,LT8645S可以轻松符合 汽车CISPR 25、Class 5峰值EMI限制。还可以使用展频(SSFM)进一 步降低EMI水平。
LT8645S内置上下高功率开关,并将必要的升压二极管、振荡 器、控制和逻辑电路集成到单个芯片中。低纹波突发工作模式 可在低输出电流下保持高效率,同时使输出纹波低于10 mV p-p。 最后,LT8645S采用小尺寸散热增强型4 mm×6 mm IC 32引脚LQFN 封装。
论自动驾驶汽车(和卡车)所需的汽车电子系统当前和未来都 在不断发展普及。当然,电压和电流电平会改变。然而,对低 EMI/EMC辐射的要求不会改变——即使在恶劣的工作环境中也是 如此。值得庆幸的是,ADI公司Power by Linear产品线提供越来越 多的解决方案,以帮助系统设计人员应对现在、将来、直至远 及2030年代中期的挑战。
-
电源
+关注
关注
184文章
17740浏览量
250565 -
自动驾驶汽车
+关注
关注
4文章
376浏览量
40837
原文标题:自动驾驶汽车的电源系统能胜任吗?
文章出处:【微信号:analog_devices,微信公众号:analog_devices】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
AUTOSAR通信对自动驾驶的影响 AUTOSAR通信与嵌入式系统设计
MEMS技术在自动驾驶汽车中的应用


自动驾驶技术的典型应用 自动驾驶技术涉及到哪些技术
通用汽车正全力推进L3级自动驾驶系统的开发
FPGA在自动驾驶领域有哪些优势?
自动驾驶汽车如何识别障碍物
自动驾驶汽车传感器有哪些
未来已来,多传感器融合感知是自动驾驶破局的关键
大众汽车和Mobileye加强自动驾驶合作

自动驾驶发展问题及解决方案浅析
Waymo自愿召回444辆自动驾驶汽车 L4的自动驾驶还有很多路要走






 工商网监
工商网监
评论