 现代步进电机如何工作
现代步进电机如何工作
- Load:0 second
- Duration:0 second
- Size:0x0
- Volume:0%
- Fps:60fps
- Sudio decoded:0 Byte
- Video decoded:0 Byte
步进电机
步进电机是一种将电脉冲转化为角位移的执行机构。其将电脉冲信号转变为角位移或线位移,是现代数字程序控制系统中的主要执行元件,应用极为广泛。

步进电机控制系统由步进电机控制器、步进电机驱动器、步进电机三部分组成,步进电机控制器是指挥中心,它发出信号脉冲给步进电机驱动器,而步进电机驱动器把接收到信号脉冲脉冲转化为电脉冲,驱动步进电机转动,控制器每发出一个信号脉冲,步进电机就旋转一个角度,它的旋转是以固定的角度一步一步运行的。控制器可以通过控制脉冲数量来控制步进电机的旋转角度,从而准确定位。通过控制脉冲频率精确控制步进电机的旋转速度。
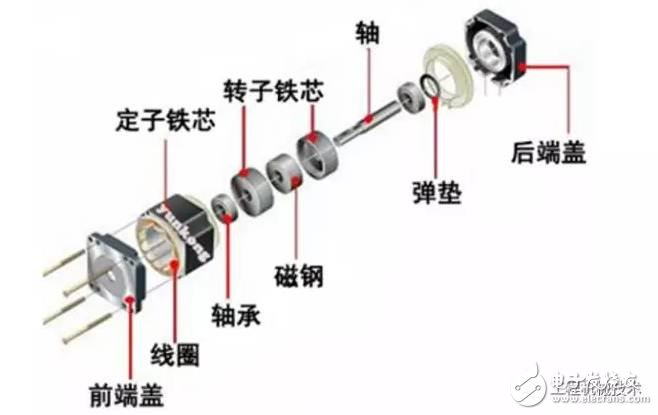
步进电机的结构及工作原理
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。
每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
我们一般用的步进电机是这样的:
他的结构图一般是这样的:
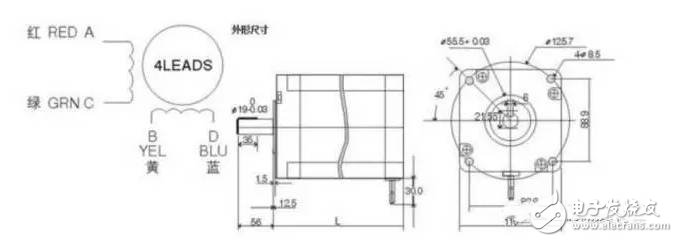
那么这个AC,BD代表什么呢?步进电机又为什么具有以上的那些特点呢?这就要从步进电机的特殊结构说起。先上一个步进电机内部的结构示意图:
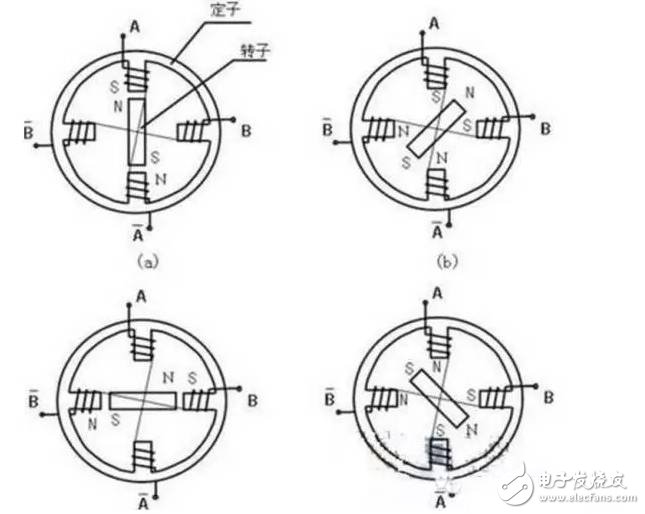
先从这个简单的图分析原理,图中有两组绕组A A-,B B-,可以看出他们分别形成的磁场是相反的,位置也是相对的。这2组绕组对应真实图中的AC和BD。
定子为铁芯,A A-,B B-绕在铁芯上,通电之后产生磁场变成电磁铁,转子为永磁体,磁场将对转自产生吸引或者排斥。
左上图A A-吸引转子,使得转子竖直(此时只有A A-通电)当B B-也通电后,B B-也产生磁场,此时转自将像A B中间区域偏转,具体偏转角度跟A B上电流大小比例有关。
左下图此时A A-断电,B B-继续通电,则转子被吸引到水平位置。
右下图此时A A-反向通电,B B-继续通电,则转自顺时针旋转,重复以上过程,则转子可以进行旋转运动,并控制通电的时机以及顺序,便可以达到控制步进电机旋转角度。
定子铁心:定子铁心为凸极结构,由硅钢片迭压而成。在面向气隙的定子铁心表面有齿距相等的小齿。
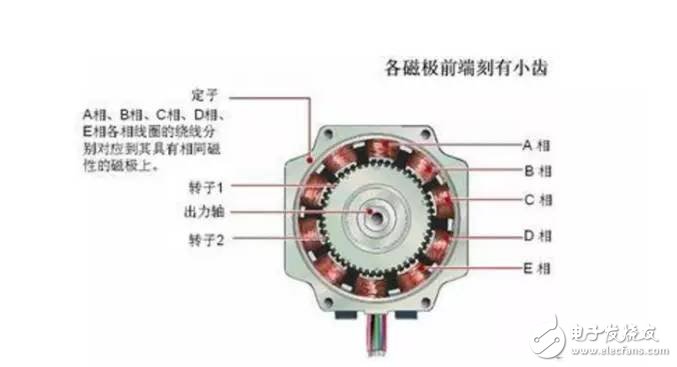
定子绕组:定子每极上套有一个集中绕组,相对两极的绕组串联构成一相。步进电动机可以做成二相、三相、四相、五相、六相、八相等。
转子:转子上只有齿槽没有绕组,系统工作要求不同,转子齿数也不同。定转子齿形相同。
原理
当步进电机切换一次定子绕组的激磁电流时,转子就旋转一个固定角度即步距角。步距角一般由切换的相电流产生的旋转力矩得到,所以需要每相极数是偶数。步进电机通常都为两相以上的,当然也有一些特殊的只有一个线圈的单相步进电机。虽说单相,实为一个线圈产生的磁通方向交互反转而驱动转子转动。实用的步进电机的相数有单相、两相、三相、四相、五相。
现在使用的步进电机大部分用永磁转子。普遍使用永久磁铁的原因是效率高,分辨率高等优点。
-
步进电机
+关注
关注
152文章
3122浏览量
147987
发布评论请先 登录
相关推荐
微型步进电机:现代科技中的精确动力源泉
步进电机的详解解答
行星减速步进电机与步进电机的区别

什么是步进电机?它的工作原理是什么?
步进电机的工作原理介绍

步进电机的类型及工作原理





 工商网监
工商网监
评论