 【技术分享】Apollo3 SDK平台添加支持复旦微FM25Q128 SPI Flash的方法
【技术分享】Apollo3 SDK平台添加支持复旦微FM25Q128 SPI Flash的方法
本文详细介绍了,如何在Apollo3 SDK v2.0平台上增加对复旦微FM25Q128 SPI Flash支持的方法。本文将结合软件和硬件,阐述如何通过Apollo3片上串行外设MSPI接口以Quad SPI模式访问SPI Flash的底层驱动代码的实现步骤。
1、 什么是MSPI
MSPI,即Multi-bit SPI的缩写,是Apollo3新引入的串行外设,可以支持单线SPI,Dual SPI,Quad SPI,以及八线Octal SPI(可以是单个Octal设备,也可以是两个Quad Pair组成的Octal 设备)等模式,最高速率24MHz,可以外接串行存储设备,如PSRAM,SPI Nor Flash等,支持XIP片上直接运行代码。MPSI支持全部的4种SPI CPOL/CPHA模式,即模式0-3。支持DMA。支持Command Queue。2个片选,以Quad-SPI为例,MSPI最多支持两路Quad-SPI,这两路共用一个MSPI CLK。两路QSPI分时操作。MSPI具体的管脚复用图如下图1,

图1 MSPI管脚复用图
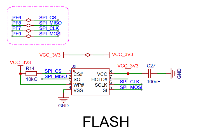
2、 MSPI连接SPI Flash,Quad SPI四线模式,如图2

图2 MSPI采用Quad SPI接口连接外部SPI Flash器件原理图
3、根据以上图2所示硬件原理图,我们需要对SDK中的BSP库进行相应的修改,将MSPI使用到的相关管脚一一进行分配和初始化,如这里用到的:
GP1 --- CE0 (片选)
GP26 --- DQ1(数据IO1, SPI DO)
GP4 --- DQ2 (数据IO2,SPI WP#)
GP22 --- DQ0 (数据IO0,SPI DI)
GP23 --- DQ3 (数据IO3,SPI HOLD#)
打开SDK v2.0目录下的工程libam_bsp,找到文件am_bsp_pins.h,按照上面分配的管脚修改定义:



再在同一工程里面找到am_bsp_pins.c文件,逐一修改以上管脚对应的属性结构体,如下:




如果不需要修改其他外设接口的管脚定义,保存文件后退出编辑模式,SDK v2.0下的示例代码默认包含BSP和HAL库文件进行编译,所以,这里需要重新将libam_bsp工程进行重新编译,假设我们使用Keil MDK编译器,那么生成的库文件为libam_bsp.lib,可以直接包含到其他的Keil MDK示例工程下进行使用。IAR生成的库文件为libam_bsp.a。
4、了解复旦微 SPI Flash器件FM25Q128的基本特性
FM25Q128是复旦微电子生产的串行SPI接口Nor Flash存储器,支持单线SPI, 双线Dual SPI和四线Quad SPI(QPI)模式,我们采用的是Quad SPI,即器件的QPI模式(4-4-4)。
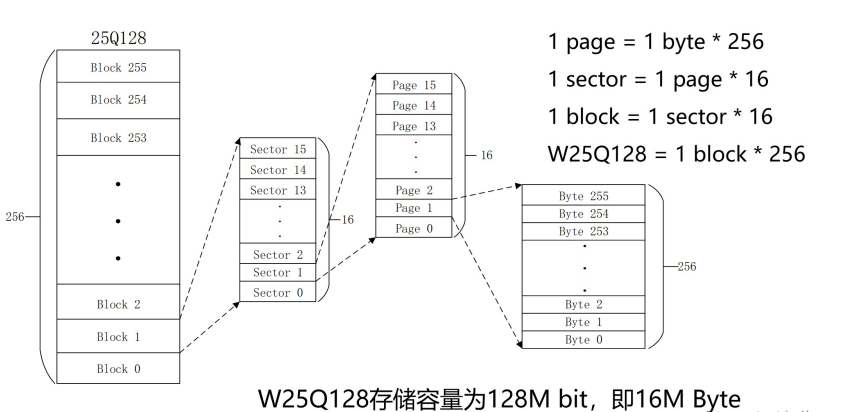
FM25Q128的容量为128Mbit(16MB),单个Sector扇区大小为4KB,支持32KB或者64KB大小的Block块,可编程页大小为256字节。Sector扇区,Block块大小和数量的宏定义详见如下代码:

我们采用的芯片封装和引脚定义如下图3所示;

图3 FM25Q125芯片引脚定义图
请特别注意管脚WP#和HOLD#/RESET#(DQ3)的描述

出厂时,QE位为0,芯片处于单线SPI模式,硬件上,芯片的Pin3为WP#信号,Pin7为HOLD#/RESET#信号,继续了解WP#和HOLD#硬件关键的特点,


SPI模式下,如果WP#管脚为低,则禁止改写Status状态寄存器的值;当HOLD#为低时,即使芯片CS片选脚被激活,芯片仍将进入暂停模式,SPI总线无法正常访问SPI Flash,包括读取Status状态寄存器的值,芯片相当于进入了复位状态。因为芯片出厂默认模式是单线SPI模式,因此,我们需要先通过Apollo3的MSPI接口的单线SPI模式(1-1-1)来初始化器件,让器件进入QPI模式(4-4-4)后,然后再使用Quad SPI进行访问SPI Flash,以实现利用最高的效率访问SPI Flash外设。SPI的不同接口类型在传输指令码、地址码、数据码时所使用的传输通道数量不同,如下图4所示:

图 4 SPI不同接口类型的区别
FM25Q128上电初始化流程如下图所示,要使能芯片的QPI模式,需要使能状态寄存器Status Register-2中的bit1位QE,然后使用0x38命令使能进入QPI模式。退出QPI模式可以发送0xFF命令或者发送软件复位序列0x66 + 0x99,如下图5所示。

图5 FM25Q125上电初始化流程
如上所述,初次上电后,Flash芯片处于单线SPI模式,WP#和HOLD#管脚可能影响状态寄存器的写入操作,实际调试底层驱动代码的过程中,笔者也发现了这个问题,由于HOLD#没有外接上拉电阻,在SPI模式下Flash芯片的HOLD#脚电平不稳,导致读写状态寄存器时而正常,时而失败,开发板正常,客户的板子失败等现象,调试了很长时间才发现问题根源在于此。我们可以将Apollo3芯片的MSPI接口配置成SPI模式,并将连接到FM25Q128的DQ2(WP#)和DQ3(HOLD#/RESET#)的管脚GP4和GP23配置成GPIO输出,使能内部上拉电阻,并且同时输出高电平,让WP#和HOLD#管脚处于非激活状态。
我们先通过阅读Datasheet来了解一下Apollo3的GPIO口结构,以及内部上拉电阻的配置。




Apollo3的所有的GPIO都可以通过软件来配置(PADnPULL)使能内部上拉电阻(除了GPIO20为下拉),上拉电阻默认状态是禁用的。另外,包含有I2C功能的GPIO的内部上拉电阻是可以选择四种不同阻值的。我们用到的GP4和GP23不包含I2C功能,因此不能选择上拉电阻的阻值。经过与AmbiqMicro原厂工程师沟通,了解到内部通用上拉电阻的阻值大约为63KΩ,这个内部的弱上拉足可以保证在SPI模式初始化SPI Flash时,WP#和HOLD#/RESET#管脚稳定为高电平状态。参考代码如下:
#define AM_BSP_GPIO_GP23 23
#define AM_BSP_GPIO_GP4 4
const am_hal_gpio_pincfg_t g_AM_BSP_GPIO_GP23_HOLD =
{
.uFuncSel = AM_HAL_PIN_23_GPIO,
.eDriveStrength = AM_HAL_GPIO_PIN_DRIVESTRENGTH_8MA,
.ePullup = AM_HAL_GPIO_PIN_PULLUP_WEAK,
.eGPOutcfg = AM_HAL_GPIO_PIN_OUTCFG_PUSHPULL,
.eGPInput = AM_HAL_GPIO_PIN_INPUT_NONE
};
const am_hal_gpio_pincfg_t g_AM_BSP_GPIO_GP4_WP =
{
.uFuncSel = AM_HAL_PIN_4_GPIO,
.eDriveStrength = AM_HAL_GPIO_PIN_DRIVESTRENGTH_8MA,
.ePullup = AM_HAL_GPIO_PIN_PULLUP_WEAK,
.eGPOutcfg = AM_HAL_GPIO_PIN_OUTCFG_PUSHPULL,
.eGPInput = AM_HAL_GPIO_PIN_INPUT_NONE
};
static void ConfigGP23AsGpioOutputForPullHighHoldPin (void)
{
//
// Configure the pin as a push-pull GPIO output.
//
am_hal_gpio_pinconfig(AM_BSP_GPIO_GP23, g_AM_BSP_GPIO_GP23_HOLD);
//
// Disable the output driver, and set the output value to the high level
// state. Note that for Apollo3 GPIOs in push-pull mode, the output
// enable, normally a tri-state control, instead functions as an enable
// for Fast GPIO. Its state does not matter on previous chips, so for
// normal GPIO usage on Apollo3, it must be disabled.
//
am_hal_gpio_state_write(AM_BSP_GPIO_GP23, AM_HAL_GPIO_OUTPUT_TRISTATE_DISABLE);
am_hal_gpio_state_write(AM_BSP_GPIO_GP23, AM_HAL_GPIO_OUTPUT_SET); // pull high
}
static void ConfigGP4AsGpioOutputForPullHighWPPin (void)
{
//
// Configure the pin as a push-pull GPIO output.
//
am_hal_gpio_pinconfig(AM_BSP_GPIO_GP4, g_AM_BSP_GPIO_GP4_WP); //
// Disable the output driver, and set the output value to the high level
// state. Note that for Apollo3 GPIOs in push-pull mode, the output
// enable, normally a tri-state control, instead functions as an enable
// for Fast GPIO. Its state does not matter on previous chips, so for
// normal GPIO usage on Apollo3, it must be disabled.
//
am_hal_gpio_state_write(AM_BSP_GPIO_GP4, AM_HAL_GPIO_OUTPUT_TRISTATE_DISABLE);
am_hal_gpio_state_write(AM_BSP_GPIO_GP4, AM_HAL_GPIO_OUTPUT_SET); // pull high
}

代码详见SDK v2.0目录下的示例工程mspi_quad_example,文件am_devices_mspi_flash.c。
5、 在SDK v2.0示例代码mspi_quad_example的基础上添加FM25Q128的支持
am_devices_mspi_flash.h文件中增加器件型号宏定义:#define FUDAN_FM25Q128
以及器件支持的相关操作命令,ID码以及容量宏定义
#if defined (FUDAN_FM25Q128)
//*******************************************************************
//
// Device specific identification.
//
//*******************************************************************
#define AM_DEVICES_MSPI_FLASH_ID 0x001840A1
#define AM_DEVICES_MSPI_FLASH_ID_MASK 0x00FFFFFF
//*******************************************************************
//
// Device specific definitions for flash commands
//
//*******************************************************************
#define AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER1 0x05 // RDSR1, read STATUS_REGISTER 1
#define AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER2 0x35 // RDSR2, read STATUS_REGISTER 2
#define AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER3 0x15 // RDSR3, read STATUS_REGISTER 3
#define AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER1 0x01 // WRSR1, write STATUS_REGISTER 1
#define AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER2 0x31 // WRSR2, write STATUS_REGISTER 2
#define AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER3 0x11 // WRSR3, write STATUS_REGISTER 3
#define AM_DEVICES_MSPI_FLASH_ENABLE_QPI_MODE 0x38 // EQIO, Enable QPI
#define AM_DEVICES_MSPI_FLASH_DISABLE_QPI_MODE 0xFF // Disable QPI
#define AM_DEVICES_MSPI_FLASH_ENABLE_RESET 0x66 // Enable Reset
#define AM_DEVICES_MSPI_FLASH_RESET 0x99 // Reset
#define AM_DEVICES_MSPI_FLASH_WRITE_ENABLE_VOLATILE 0x50 // Write Enable for Volatile Status Register
//*******************************************************************
//
// Device specific definitions for the Configuration register(s)
//
//*******************************************************************
#define AM_DEVICES_MSPI_CLEAR_STATUS_REGISTER1 (0x00) // the value to clear the status register-1
#define AM_DEVICES_MSPI_ENABLE_QUAD_STATUS_REGISTER2 (0xF2) // LC = 11b, dummy cycles = 4 for quad enable, 0 for spi mdode
#define AM_DEVICES_MSPI_CLEAR_STATUS_REGISTER3 (0xFC) // to clear the status register-3, the reserved bits will be bypassed
//*******************************************************************
//
// Device specific definitions for the flash size information
//
//*******************************************************************
#define AM_DEVICES_MSPI_FLASH_PAGE_SIZE 0x100 // 256 bytes, minimum program unit
#define AM_DEVICES_MSPI_FLASH_SECTOR_SIZE 0x1000 // 4K bytes
#define AM_DEVICES_MSPI_FLASH_BLOCK_SIZE 0x10000 // 64K bytes.
#define AM_DEVICES_MSPI_FLASH_MAX_SECTORS 4096 // Sectors within 3-byte address range. 4096 * 4KB = 16MB
#define AM_DEVICES_MSPI_FLASH_MAX_BLOCKS 256 // 256 * 64KB = 16MB
#endif
上电后初始化先清除SR1和SR3中的相应的状态位和错误标志位。
说明:状态寄存器SR2-3中的有些位标注为R,其为Reserved Bit,即保留位,不能被软件改写,建议采用先读出SR2-3的值,再使用与或操作置位或者清除可以改写的位,同时保留那些原有标注R的位的值。






am_devices_mspi_flash.c文件中增加对FM25Q128支持的初始化代码:
SPI接口初始化宏定义:
// Configure the MSPI for Serial operation during initialization
am_hal_mspi_dev_config_t SerialCE0MSPIConfig = // MSPI SERIAL CE0(SPI mode)
{
.eSpiMode = AM_HAL_MSPI_SPI_MODE_0,
.eClockFreq = AM_HAL_MSPI_CLK_3MHZ, // lower speed rate for more stable initialization operation
#if defined(MICRON_N25Q256A)
.ui8TurnAround = 3,
#elif defined (CYPRESS_S25FS064S)
.ui8TurnAround = 3,
#elif defined (MACRONIX_MX25U12835F)
.ui8TurnAround = 8,
#elif defined (FUDAN_FM25Q128)
.ui8TurnAround = 8, // The dummy clocks is 8 under SPI mode by default. will update automatically
#endif
.eAddrCfg = AM_HAL_MSPI_ADDR_3_BYTE,
.eInstrCfg = AM_HAL_MSPI_INSTR_1_BYTE,
.eDeviceConfig = AM_HAL_MSPI_FLASH_SERIAL_CE0,
.bSeparateIO = true,
.bSendInstr = true,
.bSendAddr = true,
.bTurnaround = true,
.ui8ReadInstr = AM_DEVICES_MSPI_FLASH_FAST_READ,
.ui8WriteInstr = AM_DEVICES_MSPI_FLASH_PAGE_PROGRAM,
.ui32TCBSize = 0,
.pTCB = NULL,
.scramblingStartAddr = 0,
.scramblingEndAddr = 0,
};
上电后,选择将MSPI配置为CE0,单线SPI模式,各参数说明如下:
AM_HAL_MSPI_SPI_MODE_0: 配置为SPI Mode
AM_HAL_MSPI_CLK_3MHZ: 配置较低的SPI速率提高稳定性和兼容性
.ui8TurnAround = 8:芯片出厂LC默认值为00,对应的SPI模式下dummy cycles为8
AM_HAL_MSPI_ADDR_3_BYTE: 24位即3字节地址码
AM_HAL_MSPI_INSTR_1_BYTE: 1字节指令码
AM_HAL_MSPI_FLASH_SERIAL_CE0: 单线SPI模式,片选通道CE0
FM25Q128初始化代码如下:
//*******************************************************************
//
// FUDAN FM25Q128 Support
// Added by Roger
//
//*******************************************************************
#if defined (FUDAN_FM25Q128)
//
// Device specific initialization function.
//
uint32_t am_device_init_flash(am_hal_mspi_dev_config_t *psMSPISettings)
{
uint32_t ui32Status = AM_HAL_STATUS_SUCCESS;
// workaround for the HOLD# pin bug
// When read the SPI Flash device at the first time powered-on, the device will present as SPI mode
// If the WP# or Hold# pin is tied directly to a low level (such as, connect to the ground) during standard SPI
// or Dual SPI operation, the QE bit should never be set to a 1.
// Pull the WP# and HOLD# pin of SPI Flash as a high level to prevent hold state
ConfigGP23AsGpioOutputForPullHighHoldPin(); // added by Roger
ConfigGP4AsGpioOutputForPullHighWPPin(); // added by Roger
#if 1
//
// Reset the Fudan FM25Q128. using the existing api
//
if (AM_HAL_STATUS_SUCCESS != am_devices_mspi_flash_reset())
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
// software reset code
#else
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_ENABLE_RESET, false, 0, g_PIOBuffer, 0); // Enable reset
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_RESET, false, 0, g_PIOBuffer, 0); // Reset
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
#endif
am_util_delay_us(1000); // for stable concern, delay 1000us after software reset
g_ui32SR1 = 0;
g_ui32SR2 = 0;
g_ui32SR3 = 0;
am_util_stdio_printf("Dump out the STATUS REGISTER 1 - 3 before configurating:\n\r");
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER1, false, 0, (uint32_t *)&g_ui32SR1, 1);
am_util_stdio_printf("STATUS REGISTER 1 is 0x%02X\n", (uint8_t)g_ui32SR1);
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER2, false, 0, (uint32_t *)&g_ui32SR2, 1);
am_util_stdio_printf("STATUS REGISTER 2 is 0x%02X\n", (uint8_t)g_ui32SR2);
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER3, false, 0, (uint32_t *)&g_ui32SR3, 1);
am_util_stdio_printf("STATUS REGISTER 3 is 0x%02X\n", (uint8_t)g_ui32SR3);
//
// Enable writing to the Status/Configuration register.
//
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE, false, 0, g_PIOBuffer, 0); // Non-Volatile
//ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE_VOLATILE, false, 0, g_PIOBuffer, 0); // Volatile
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Configure the Fudan FM25Q128 Status Register-1.
//
g_PIOBuffer[0] = AM_DEVICES_MSPI_CLEAR_STATUS_REGISTER1 ; // Write status register + Data (0x00) --> Clear
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER1, false, 0, g_PIOBuffer, 1); // SR1
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Enable writing to the Status/Configuration register.
//
//ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE, false, 0, g_PIOBuffer, 0); // Non-Volatile
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE_VOLATILE, false, 0, g_PIOBuffer, 0); // Volatile
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Configure the Fudan FM25Q128 Status Register-3.
//
g_PIOBuffer[0] = g_ui32SR3 & ~AM_DEVICES_MSPI_CLEAR_STATUS_REGISTER3;
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER3, false, 0, g_PIOBuffer, 1);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
// SPI mode does not need to config the QE bit, move the QE setting to the quad SPI initial code
#if 0
//
// Enable writing to the Status/Configuration register.
//
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE, false, 0, g_PIOBuffer, 0); // Non-Volatile
//ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE_VOLATILE, false, 0, g_PIOBuffer, 0); // Volatile
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Configure the Fudan FM25Q128 Status Register-2.
//
g_PIOBuffer[0] = (uint8_t)g_ui32SR2 | AM_DEVICES_MSPI_ENABLE_QUAD_STATUS_REGISTER2; // Setting LC and Enable QE(QUAD ENABLE)
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER2, false, 0, g_PIOBuffer, 1);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
#endif
am_util_stdio_printf("Dump out the STATUS REGISTER 1 & 3 after having been overwritten:\n\r");
g_ui32SR1 = 0;
g_ui32SR2 = 0;
g_ui32SR3 = 0;
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER1, false, 0, (uint32_t *)&g_ui32SR1, 1);
am_util_stdio_printf("STATUS REGISTER 1 is 0x%02X\n", (uint8_t)g_ui32SR1);
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER2, false, 0, (uint32_t *)&g_ui32SR2, 1);
am_util_stdio_printf("STATUS REGISTER 2 is 0x%02X\n", (uint8_t)g_ui32SR2);
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER3, false, 0, (uint32_t *)&g_ui32SR3, 1);
am_util_stdio_printf("STATUS REGISTER 3 is 0x%02X\n", (uint8_t)g_ui32SR3);
switch (psMSPISettings->eDeviceConfig)
{
case AM_HAL_MSPI_FLASH_SERIAL_CE0:
case AM_HAL_MSPI_FLASH_SERIAL_CE1:
// Nothing to do. Device defaults to SPI mode for initializing SPI flash device. Disable QPI mode
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_DISABLE_QPI_MODE, false, 0, g_PIOBuffer, 0); // Disable QPI, return to SPI
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
break;
case AM_HAL_MSPI_FLASH_DUAL_CE0:
case AM_HAL_MSPI_FLASH_DUAL_CE1:
// Device does not support Dual mode.
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
//break;
case AM_HAL_MSPI_FLASH_QUAD_CE0:
case AM_HAL_MSPI_FLASH_QUAD_CE1:
case AM_HAL_MSPI_FLASH_QUADPAIRED:
case AM_HAL_MSPI_FLASH_QUADPAIRED_SERIAL:
am_util_stdio_printf("Check the QE bit in STATUS REGISTER 2.\n");
// check the QE bit in SR2
if ( ((uint8_t)g_ui32SR2 & (1<<1)) == 0)
{
am_util_stdio_printf("Config the STATUS REGISTER 2 for Quad SPI mode.\n");
//
// Enable writing to the Status/Configuration register.
//
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE, false, 0, g_PIOBuffer, 0); // Non-Volatile
//ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE_VOLATILE, false, 0, g_PIOBuffer, 0); // Volatile
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Configure the Fudan FM25Q128 Status Register-2.
//
g_PIOBuffer[0] = (uint8_t)g_ui32SR2 | AM_DEVICES_MSPI_ENABLE_QUAD_STATUS_REGISTER2; // default LC Setting and Enable QE(QUAD ENABLE)
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_STATUS_REGISTER2, false, 0, g_PIOBuffer, 1);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
}
else
{
am_util_stdio_printf("QE bit in the STATUS REGISTER 2 has already been enabled.\n");
}
am_util_stdio_printf("Get the value of STATUS REGISTER 2:\n");
ui32Status = am_device_command_read(AM_DEVICES_MSPI_FLASH_READ_STATUS_REGISTER2, false, 0, (uint32_t *)&g_ui32SR2, 1);
am_util_stdio_printf("STATUS REGISTER 2 is 0x%02X\n", (uint8_t)g_ui32SR2);
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_ENABLE_QPI_MODE, false, 0, g_PIOBuffer, 0); // Enable QPI
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
break;
case AM_HAL_MSPI_FLASH_OCTAL_CE0:
case AM_HAL_MSPI_FLASH_OCTAL_CE1:
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
//break;
}
return AM_DEVICES_MSPI_FLASH_STATUS_SUCCESS;
}
//
// Device specific de-initialization function.
//
uint32_t am_device_deinit_flash(am_hal_mspi_dev_config_t *psMSPISettings)
{
uint32_t ui32Status;
//
// Reset the Fudan FM25Q128
//
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_ENABLE_RESET, false, 0, g_PIOBuffer, 0); // Enable reset
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_RESET, false, 0, g_PIOBuffer, 0); // Reset
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
// added by Roger
am_util_delay_us(1000); // delay 1000us after software reset
//
// Configure the Fudan FM25Q128 Device mode.
//
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_WRITE_ENABLE, false, 0, g_PIOBuffer, 0);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
switch (psMSPISettings->eDeviceConfig)
{
case AM_HAL_MSPI_FLASH_SERIAL_CE0:
case AM_HAL_MSPI_FLASH_SERIAL_CE1:
// Nothing to do. Device defaults to SPI mode.
break;
case AM_HAL_MSPI_FLASH_DUAL_CE0:
case AM_HAL_MSPI_FLASH_DUAL_CE1:
// Device does not support Dual mode.
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
//break;
case AM_HAL_MSPI_FLASH_QUAD_CE0:
case AM_HAL_MSPI_FLASH_QUAD_CE1:
case AM_HAL_MSPI_FLASH_QUADPAIRED:
case AM_HAL_MSPI_FLASH_QUADPAIRED_SERIAL:
ui32Status = am_device_command_write(AM_DEVICES_MSPI_FLASH_DISABLE_QPI_MODE, false, 0, g_PIOBuffer, 0);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
break;
case AM_HAL_MSPI_FLASH_OCTAL_CE0:
case AM_HAL_MSPI_FLASH_OCTAL_CE1:
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
//break;
}
return AM_DEVICES_MSPI_FLASH_STATUS_SUCCESS;
}
#endif
uint32_t
am_devices_mspi_flash_init(am_hal_mspi_dev_config_t *psMSPISettings, void **pHandle)
{
uint32_t ui32Status;
//
// Enable fault detection.
//
#if AM_APOLLO3_MCUCTRL
am_hal_mcuctrl_control(AM_HAL_MCUCTRL_CONTROL_FAULT_CAPTURE_ENABLE, 0);
#else
am_hal_mcuctrl_fault_capture_enable();
#endif
//
// Configure the MSPI for Serial or Quad-Paired Serial operation during initialization.
//
switch (psMSPISettings->eDeviceConfig)
{
case AM_HAL_MSPI_FLASH_SERIAL_CE0: // Select CE0 SPI mode
case AM_HAL_MSPI_FLASH_DUAL_CE0:
case AM_HAL_MSPI_FLASH_QUAD_CE0: // Select CE0 Quad mode
case AM_HAL_MSPI_FLASH_OCTAL_CE0:
g_psMSPISettings = SerialCE0MSPIConfig; // Configure the MSPI for Serial operation during initialization
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_initialize(AM_DEVICES_MSPI_FLASH_MSPI_INSTANCE, &g_pMSPIHandle))
{
am_util_stdio_printf("Error - Failed to initialize MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_power_control(g_pMSPIHandle, AM_HAL_SYSCTRL_WAKE, false))
{
am_util_stdio_printf("Error - Failed to power on MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_device_configure(g_pMSPIHandle, &SerialCE0MSPIConfig))
{
am_util_stdio_printf("Error - Failed to configure MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_enable(g_pMSPIHandle))
{
am_util_stdio_printf("Error - Failed to enable MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
am_bsp_mspi_pins_enable(SerialCE0MSPIConfig.eDeviceConfig); // Set up the MSPI pins for CE0
break;
case AM_HAL_MSPI_FLASH_SERIAL_CE1:
case AM_HAL_MSPI_FLASH_DUAL_CE1:
case AM_HAL_MSPI_FLASH_QUAD_CE1:
case AM_HAL_MSPI_FLASH_OCTAL_CE1:
g_psMSPISettings = SerialCE1MSPIConfig;
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_initialize(AM_DEVICES_MSPI_FLASH_MSPI_INSTANCE, &g_pMSPIHandle))
{
am_util_stdio_printf("Error - Failed to initialize MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_power_control(g_pMSPIHandle, AM_HAL_SYSCTRL_WAKE, false))
{
am_util_stdio_printf("Error - Failed to power on MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_device_configure(g_pMSPIHandle, &SerialCE1MSPIConfig))
{
am_util_stdio_printf("Error - Failed to configure MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_enable(g_pMSPIHandle))
{
am_util_stdio_printf("Error - Failed to enable MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
am_bsp_mspi_pins_enable(SerialCE1MSPIConfig.eDeviceConfig); // Set up the MSPI pins for CE1
break;
case AM_HAL_MSPI_FLASH_QUADPAIRED:
g_psMSPISettings = QuadPairedSerialMSPIConfig;
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_initialize(AM_DEVICES_MSPI_FLASH_MSPI_INSTANCE, &g_pMSPIHandle))
{
am_util_stdio_printf("Error - Failed to initialize MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_power_control(g_pMSPIHandle, AM_HAL_SYSCTRL_WAKE, false))
{
am_util_stdio_printf("Error - Failed to power on MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_device_configure(g_pMSPIHandle, &QuadPairedSerialMSPIConfig))
{
am_util_stdio_printf("Error - Failed to configure MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
if (AM_HAL_STATUS_SUCCESS != am_hal_mspi_enable(g_pMSPIHandle))
{
am_util_stdio_printf("Error - Failed to enable MSPI.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
am_bsp_mspi_pins_enable(QuadPairedSerialMSPIConfig.eDeviceConfig); // Set up the MSPI pins
break;
case AM_HAL_MSPI_FLASH_QUADPAIRED_SERIAL:
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
//break;
}
if (AM_HAL_STATUS_SUCCESS != am_devices_mspi_flash_reset()) // software reset the external flash device
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
// added by Roger
am_util_delay_us(1000); // for stable concern, delay 1000us after software reset
//
// Device specific MSPI Flash initialization.
// Added by Roger
//
ui32Status = am_device_init_flash(psMSPISettings);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
am_util_stdio_printf("Error - Failed to initial device specific MSPI Flash.\n");
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Initialize the MSPI settings for the SPI FLASH.
//
g_psMSPISettings = *psMSPISettings;
// Disable MSPI before re-configuring it
ui32Status = am_hal_mspi_disable(g_pMSPIHandle);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
// added by Roger
#if defined (FUDAN_FM25Q128)
am_util_stdio_printf("Status Register 2 is 0x%02X.\n",(uint8_t)g_ui32SR2);
if ((g_psMSPISettings.eDeviceConfig == AM_HAL_MSPI_FLASH_QUAD_CE0) || (g_psMSPISettings.eDeviceConfig == AM_HAL_MSPI_FLASH_QUAD_CE1))
{
am_util_stdio_printf("MSPI operation with Quad SPI mode.\n");
// added by Roger, for updating the dummy clocks according to the LC setting under QPI mode
switch (((uint8_t)g_ui32SR2 & 0xC0) >> 6)
{
case 0: // LC = 00
g_psMSPISettings.ui8TurnAround = 6;
break;
case 1: // LC = 01
g_psMSPISettings.ui8TurnAround = 8;
break;
case 2: // LC = 10
g_psMSPISettings.ui8TurnAround = 10;
break;
case 3: // LC = 11
g_psMSPISettings.ui8TurnAround = 4;
break;
default:
g_psMSPISettings.ui8TurnAround = 6;
break;
}
}
if ((g_psMSPISettings.eDeviceConfig == AM_HAL_MSPI_FLASH_SERIAL_CE0) || (g_psMSPISettings.eDeviceConfig == AM_HAL_MSPI_FLASH_SERIAL_CE1))
{
am_util_stdio_printf("MSPI operation with SPI mode.\n");
// added by Roger, for updating the dummy clocks according to the LC setting under SPI mode
switch (((uint8_t)g_ui32SR2 & 0xC0) >>6)
{
case 0: // LC = 00
case 1: // LC = 01
case 2: // LC = 10
g_psMSPISettings.ui8TurnAround = 8;
break;
case 3: // LC = 11
g_psMSPISettings.ui8TurnAround = 0;
break;
default:
g_psMSPISettings.ui8TurnAround = 8;
break;
}
}
am_util_stdio_printf("g_psMSPISettings.ui8TurnAround = 0x%02X.\n", g_psMSPISettings.ui8TurnAround);
#endif
//
// Re-Configure the MSPI for the requested operation mode.
//
//ui32Status = am_hal_mspi_device_configure(g_pMSPIHandle, psMSPISettings);
ui32Status = am_hal_mspi_device_configure(g_pMSPIHandle, &g_psMSPISettings); // modified by Roger
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
// Re-Enable MSPI
ui32Status = am_hal_mspi_enable(g_pMSPIHandle);
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
//
// Configure the MSPI pins.
//
am_bsp_mspi_pins_enable(g_psMSPISettings.eDeviceConfig); // Set up the MSPI pins
//
// Enable MSPI interrupts.
//
#if MSPI_USE_CQ
ui32Status = am_hal_mspi_interrupt_clear(g_pMSPIHandle, AM_HAL_MSPI_INT_CQUPD | AM_HAL_MSPI_INT_ERR );
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
ui32Status = am_hal_mspi_interrupt_enable(g_pMSPIHandle, AM_HAL_MSPI_INT_CQUPD | AM_HAL_MSPI_INT_ERR );
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
#else
ui32Status = am_hal_mspi_interrupt_clear(g_pMSPIHandle, AM_HAL_MSPI_INT_ERR | AM_HAL_MSPI_INT_DMACMP | AM_HAL_MSPI_INT_CMDCMP );
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
ui32Status = am_hal_mspi_interrupt_enable(g_pMSPIHandle, AM_HAL_MSPI_INT_ERR | AM_HAL_MSPI_INT_DMACMP | AM_HAL_MSPI_INT_CMDCMP );
if (AM_HAL_STATUS_SUCCESS != ui32Status)
{
return AM_DEVICES_MSPI_FLASH_STATUS_ERROR;
}
#endif
#if AM_CMSIS_REGS
NVIC_EnableIRQ(MSPI_IRQn);
#else // AM_CMSIS_REGS
am_hal_interrupt_enable(AM_HAL_INTERRUPT_MSPI);
#endif // AM_CMSIS_REGS
am_hal_interrupt_master_enable();
//
// Return the handle.
//
*pHandle = g_pMSPIHandle;
//
// Return the status.
//
return AM_DEVICES_MSPI_FLASH_STATUS_SUCCESS;
}
至此,FM25Q128的底层驱动代码与SDK中的MSPI外设API已经对接完成,我们可以操作以下的API对Flash进行擦除扇区,擦除块,擦除全片,读,写等测试。
//SPI Flash初始化
uint32_t
am_devices_mspi_flash_init(am_hal_mspi_dev_config_t *psMSPISettings, void **pHandle);
// 获取SPI Flash的器件ID码
uint32_t
am_devices_mspi_flash_id(void);
// SPI Flash扇区擦除。注意:实际上是调用的Block块擦除命令0xD8,擦除单位为64KB
uint32_t
am_devices_mspi_flash_sector_erase(uint32_t ui32SectorAddress);
// SPI Flash全片擦除
uint32_t am_devices_mspi_flash_mass_erase(void);
// 读取SPI Flash内容
uint32_t
am_devices_mspi_flash_read(uint8_t *pui8RxBuffer,
uint32_t ui32ReadAddress,
uint32_t ui32NumBytes,
bool bWaitForCompletion);
// SPI Flash写入内容
uint32_t
am_devices_mspi_flash_write(uint8_t *pui8TxBuffer,
uint32_t ui32WriteAddress,
uint32_t ui32NumBytes);
SPI Flash的相关API操作Demo详见mspi_quad_example工程下的mspi_quad_example.c文件。注意:开启宏定义#define TEST_QUAD_SPI,即为测试Quad SPI模式读写SPI Flash;如果注释掉该宏,则为单线SPI模式读写SPI Flash。SPI Flash操作成功后,通过J-Link的SWO输出log信息显示操作结果,截图如下:



后记:
整理一下调试过程中遇到的一些坑:
1、SDK v2.0与v1.2.12启动代码startup_keil.s作了改动,直接将SDK v1.2.12中调试好的驱动代码放到v2.0中进行编译,导致无法进入MSPI中断服务程序,读取Flash内容时卡死,原因是SDK v2.0中把MSPI中断服务函数名称修改了:void am_mspi0_isr(void)

2、新的片子FM25Q128在初始化过程中无法正常读取和修改状态寄存器,这是因为芯片默认QE=0,芯片处于单线SPI模式,Pin3为WP#脚,Pin7位Hold#/RESET#脚,由于Pin7电压不稳定,或者处于低电平状态,导致芯片进入RESET状态,MSPI无法正确访问Flash状态寄存器,导致读写失败!初始化为SPI后,将MCU连接到SPI Flash的Pin3和Pin7的IO设置为GPIO输出并使能内部上拉,输出高电平,初始化SPI Flash操作过程中,拉高WP#和HOLD#/RESET#管脚,让Flash芯片处于非写保护和RESET/HOLD状态。代码片段示例如下:

-
SPI Flash
+关注
关注
1文章
13浏览量
10390
发布评论请先 登录
相关推荐
昂科烧录器支持FuDanWei复旦微电子的低功耗微控制器FM33FR024

STM32CUBEMX(13)--SPI,W25Q128外部Flash移植
物联网行业中Nor Flash的软件设计分享_W25Q128的软件设计方案
用spi_flash_read接口去访问SPI外挂的FLASH,无法返回是怎么回事?
FLASH芯片从W25Q80BL换为W25Q80DV后,系统运行经常崩溃怎么解决?
ESP32外部flash与spi外设冲突怎么解决?
【GD32H757Z海棠派开发板使用手册】第十一讲 SPI-SPI NOR FLASH读写实验

【GD32F470紫藤派开发板使用手册】第十一讲 SPI-SPI NOR FLASH读写实验





 工商网监
工商网监
评论