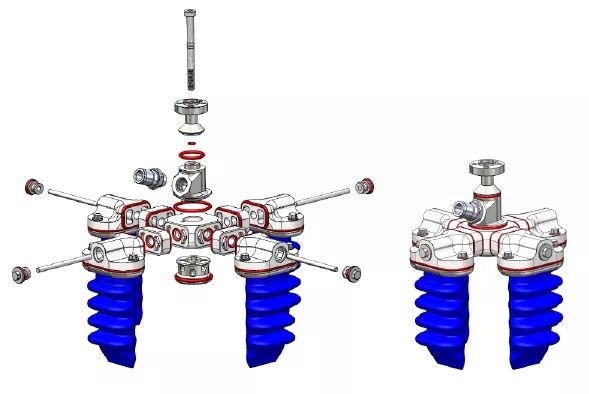
 机械臂+末端夹爪完整构成了人类手臂
机械臂+末端夹爪完整构成了人类手臂
之前介绍过协作机器人行业:协作机器人研究全景图
但机器人本体竞争异常激烈,最近交流中,发现机械臂的最佳排挡 - 末端夹爪,是个不错的方向。国外已经做到很先进的水平,国内还不多,有机会。
01
夹爪是模仿人类的手
就像机械臂,模仿的是人类的手臂,本文介绍的末端夹爪模仿的是人类灵巧的手,机械臂+末端夹爪才完整构成了人类手臂。
工业机器人的夹爪,也称为末端执行器,它是装在工业机器人手臂上直接抓握工件或执行作业的部件,具有夹持、运输、放置工件到某一个位置的功能。
末端夹爪种类繁多
从形态上来看,夹爪可以是像人手那样具有手指,比如三指、五指产品,也可以是不具备手指的手掌,比如平行两指夹子;可以是类人的抓手,也可以是进行专业作业的工具,例如装在机器人手腕上的喷漆枪、焊接工具等。
从驱动方式来说,又可以分为液压驱动、气压驱动及电力驱动3种。
液压末端执行器,调速方便,但压力较大,系统成本高,维护较麻烦。
气动末端执行器因成本较低,产品型号丰富成为目前工业领域运用最广泛的末端执行器,但气源气压的不稳定输出会导致夹持力不够,使得工件易脱落。
电动末端执行器在性能和结构上均优于液压和气动末端执行器,是未来末端执行器行业的发展趋势。
相比于气动末端执行器,其在系统结构上用电动驱动代替气动末端执行器的气源、过滤器、电磁阀等部分。相比于液压末端执行器,其系统维护方便,无需使用液压能源,可减小能源污染。
4种常用的末端执行器
标配-真空吸盘
一般通过控制气泵吸取物品,根据抓取物品形态很多,需要物品表面光滑,且不能太重,应用场景有限,一般是机械臂的标配。
新材料-软体夹爪
应用软材料设计制造的软体手引起了广泛关注,软体手应用柔性材质可达成变形的效果,能够自适应地包覆住目标物体,而无需预先知道其准确的形状和尺寸,有望解决异形、易损物品大规模自动化生产问题。其材质通过食品、药品安全认证,所以可抓取食品、药品等、生鲜果蔬等。
工业常用 - 平行两指
国内外公司:SCHUNK、FESTO、SMC、慧灵科技
可以气动、电动控制,结构较为简单,比较成熟,工业常用。
未来趋势-多指灵巧手
国内公司:RIGHTHAND Labs、Robotiq、大寰机器人、钧舵机器人
一般通过电动控制,可精确调整角度和力度,实现复杂场景抓取。
通过多自由度手掌的自由度变化和构型变化来增加多指灵巧手的工作空间,灵巧度和操作度。相比传统刚性手掌,多自由度手掌的应用极大地提高了多指灵巧手的灵巧度和操控能力。
不同方案对比及国内外公司

02
国外末端夹爪已经做得非常牛逼,除了贵
观摩了一圈国外几家做末端夹爪的公司,挺受震撼,真的是很好很强大,但是也很贵。
目前全球较为成熟的末端执行器生产公司均以欧美日公司为主,实力较强的公司有SCHUNK、FESTO、RIGHTHAND Labs、ROBOTIQ、SMC、SoftRobotics、Grabit、IAI等,中国的末端执行器市场几乎被这些国外产品所垄断,接下来逐一介绍。
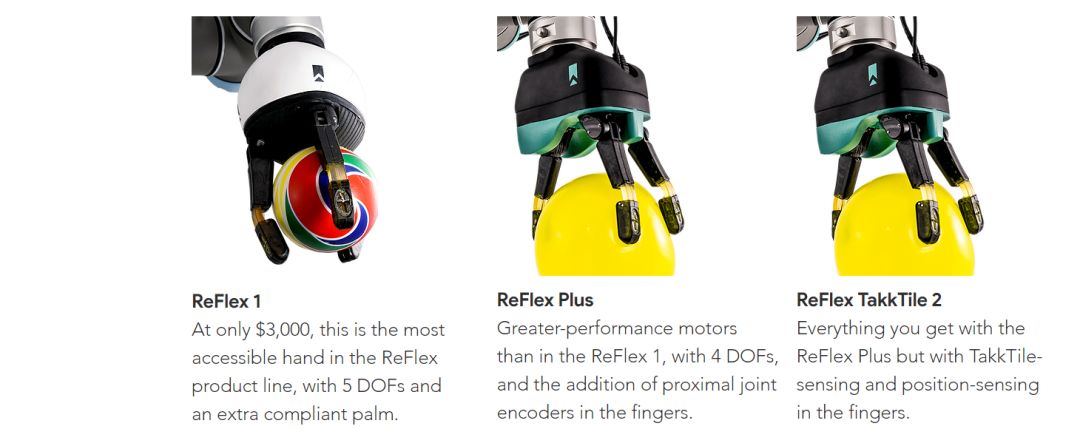
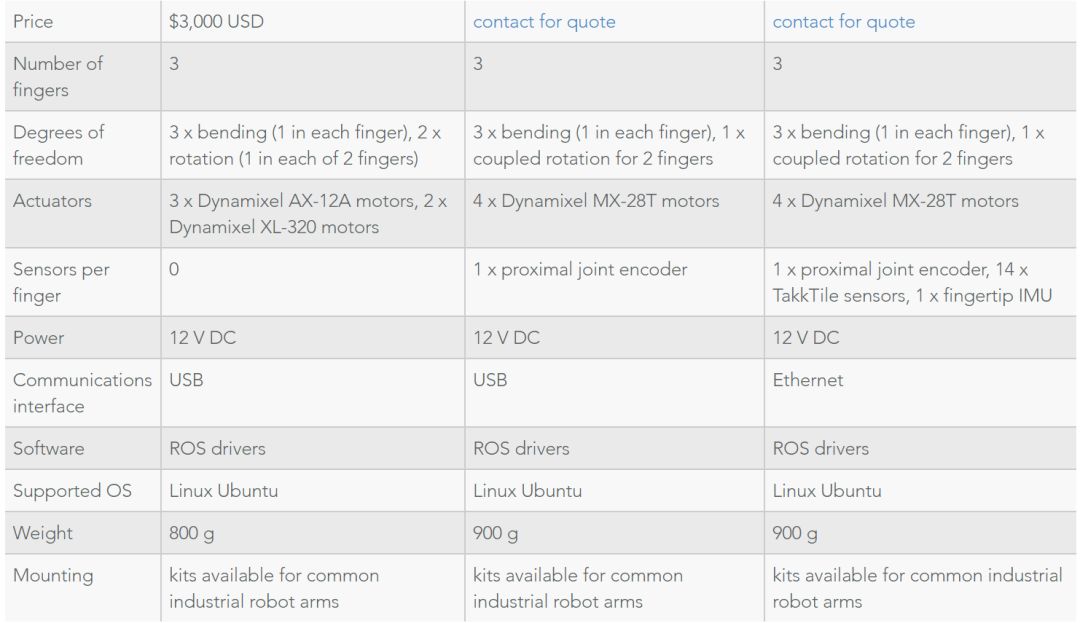
▢RIGHTHAND Labs- 美国- 多指灵巧手+触觉传感器
官网:https://www.labs.righthandrobotics.com/reflexhand
其主打产品三指电动夹爪ReFlex Hand系列,同时推出了具有感应能力TakkTile触觉传感器,既能像手一样抓取,又能感知压力。
ReFlex Hand系列(科研,先进)
视频介绍挺酷炫的:https://youtu.be/4Ku7Q3vEkRw(快去翻墙观看)
TakkTile触觉传感器 - 感知配件
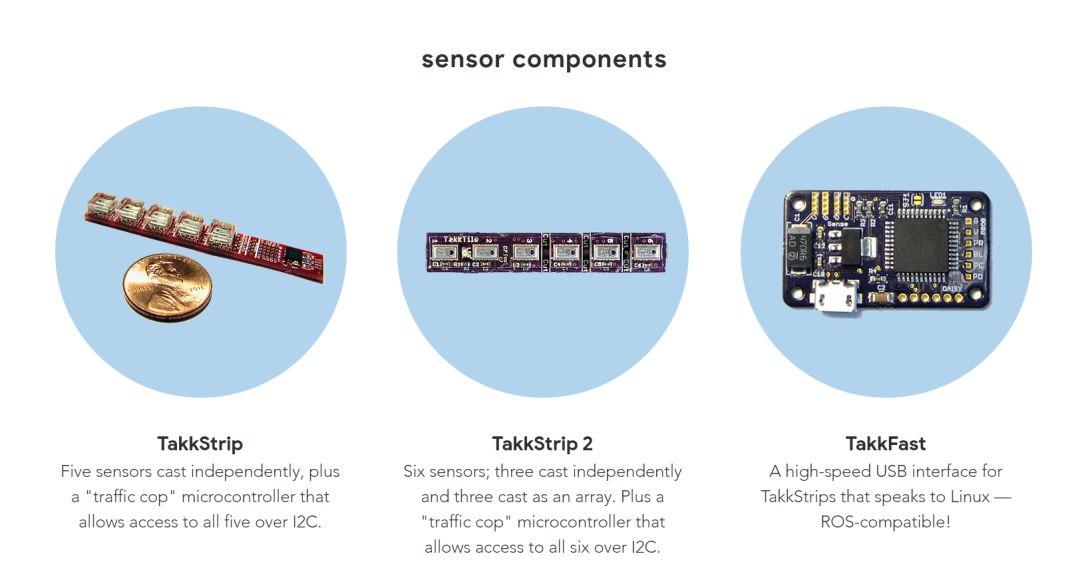
可安装到ReFlex Hand上使用,具备压力触觉。
▢SCHUNK - 德国 - 电动夹爪 - 老牌工业
官网:https://schunk.com/
产品线非常全(气动两指、三指夹爪,电动三指、四指等)
▢FESTO - 德国 - 气动三指、两指
官网:https://www.festo.com
气动夹爪为主
FESTO的气动三指手、二指平行夹爪与弹性夹具,具有很高的柔性。
▢Robotiq -加拿大 -多指灵巧手
官网:https://robotiq.com
Robotiq公司成立于2008年,是加拿大拉瓦尔大学(Laval University)的子公司。总部位于魁北克的Robotiq制造的设备通常需要人类灵巧的双手才能完成任务。该公司生产“夹子”,可用于在装配线上拾取和放置零部件或产品,还可用于传感器、摄像技术和将所有东西结合在一起的软件。
融资历程
18年12月,Robotiq宣布了其首笔机构融资—来自波士顿风险投资公司Battery Ventures的3100万加元(合2300万美元)融资。
产品从2指到3指均覆盖
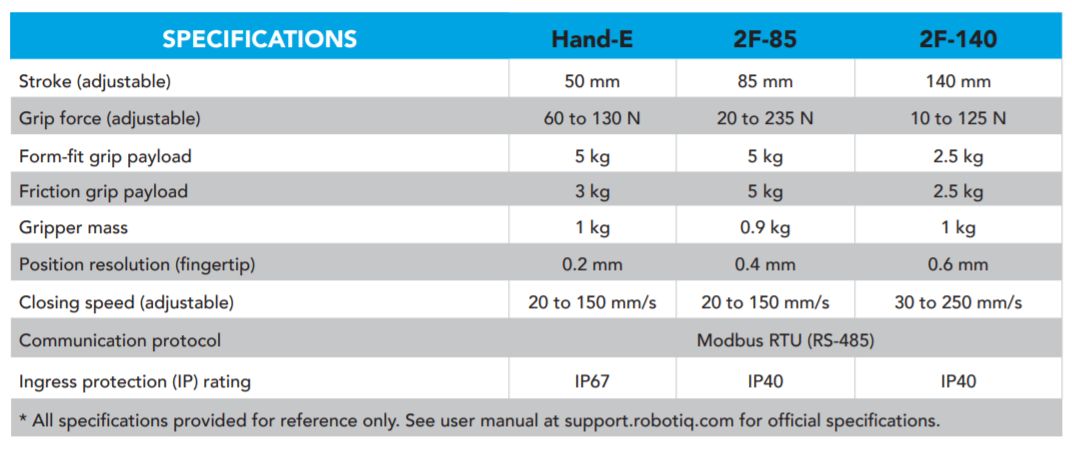
HAND-E平行两指与2F-85两指有区别,HAND-E 是平行两指更简单,只能平行抓持,而2F-85两指既能实现平行两指的夹取,又能实现包络抓持,比如像手一样包裹抓取一个球体。
三指夹爪-3-Finger Adaptive Robot Gripper
三指产品就更加高端了,7自由度不输于机械臂,当然价格也是很高端的。
▢Soft Robotics - 美国 - 软体夹爪
官网:https://www.softroboticsinc.com
Soft Robotics Inc.是一家软性机器抓手及控制系统研发商,传统机械抓手不同,软抓手与内部充满空气,外部使用弹性材料,可以解决目前工业机器人领域面临的采摘和抓放上的困难。可应用于食品、农业、日化、物流等领域。公司还研发了一款拣货系统,每小时可以完成600次拾取。
融到B轮
2018年5月4日宣布获2000万美元B轮融资,投资方包括Scale Venture Partners、Calibrate Ventures、Honeywell Ventures、Tekfen Ventures,以及机器人巨头ABB,曾在2015年后期获得了500万美元A轮融资。

气动柔性夹爪mGrip
视频介绍:https://youtu.be/aj8qjc-GhiE
▢Grabit - 美国 - 静电粘附
官网:https://grabitinc.com
Nike投了最新一轮,用来造鞋

静电吸附(electroadhesion)静电粘附夹爪(很独特)
其电粘附夹具具有无限的灵活性 - 可轻松堆叠皮革,网眼和复合纤维等材料,精度高到能把一束头发抓起来。
▢SMC- 日本 - 气动夹爪- 老牌工业
官网:http://www.smc.com.cn
气动两指夹爪为主


03
国内夹爪学习模仿,机会很大
随着人口红利消逝,机器换人大潮席卷而来,机器人需求量快速上升,作为机械臂的最佳拍档,国内末端夹爪市场也将迎来快速发展。
但是,中国的夹爪市场几乎被国外产品所垄断。
好处是,国内的学习模仿能力很强,不论是电动夹爪还是柔性夹爪,国内都有学习模仿者,而且在成本方面有较大优势。接下来看看国内厂商的表现。
国内夹爪创业融资进展一览表

融资阶段还都处于早期,有机会提前布局。
▢SRT软体机器人 - A轮 - 北京- 柔性夹爪
官网:http://www.softrobottech.com
融资历程

气动柔性夹爪系列产品(类似Soft Robotics)

柔性夹爪自适应能力强,适合抓取易损伤物体。其主要部件由柔性材料制备,模拟人手的抓取动作,同一爪手即可抓取不同尺寸、形状和重量的物体。
不同于传统爪手的刚性结构,柔性抓持器具有柔软的气动“手指”,能够自适应地包覆住目标物体,无需根据物体精确的尺寸、形状进行预先调整,摆脱了传统生产线要求生产对象尺寸均等的束缚。夹爪手指部分由柔性材质构成,抓持动作轻柔,尤其适合于抓取易损伤或软质不定形物体。
适用行业:3C电子、食品、药品等场景应用丰富
价格方面:SRT的软性夹爪目前售价为几千到两万多元,而且容易起量。
▢柔触机器人 - 天使轮 - 苏州 - 柔性夹爪
官网:http://www.rorobot.cc
柔触机器人是一家专业从事机器人柔性末端抓取解决方案的企业,柔触手爪拓展了机器人的应用领域,使机器人能够适用于不同形状,不同尺寸,不同重量和材质的物品而不需要重新设计和更换夹具。柔软的材质和可调节的抓取力度,避免了产品表面的划痕与破损。
融资历程

根据抓取物体重量划分4个型号产品(类似Soft Robotics)

柔触-柔性夹爪火锅料抓取
https://v.qq.com/x/page/j0635082c6k.html
达到食品级安全,可抓取多种形状物体,同一夹爪实现多工序抓取任务。
软体抓手小结
应用空间广:软体抓手达到食品级材质可抓取食品、药品;抓手材质柔软,可抓取易碎品、不规则产品;包裹性好,可完成多工序抓取;物流、玩具、食品包装、3c电子、汽车零部件、服装纺织等都使用,可预见出货量大。
新材料门槛高:在高分子基体材料中,加入了纳米添加剂,提升了现有柔性材料的拉伸强度和耐磨性。而材料的研发本身就具备较高的knowhow,因为除了材料的选择和配比,制造工艺、环境和条件也会影响制成效果。
量产门槛大:工业场景对产品寿命、一致性、成本要求高,实现量产过程对产品的良率和一致性的控制提升要求很高。
竞争对手少:国内目前主要SRT和柔触两家在做软体抓手,据说产品出自同一专利,项目还处于成长期阶段。
▢大寰机器人 - 天使轮 - 深圳 - 多指灵巧手
官网:http://www.dh-robotics.com
深圳市大寰机器人科技有限公司,成立于2016年,是一家致力于开发机器人末端执行器、机器视觉方案与智能抓取系统的高新技术企业。
大寰机器人自主研发并推出国内首款大行程、自适应机器人电动夹爪,使机器人末端手爪更具通用性,在3C电子、汽车零部件、医疗设备与仪器、服务机器人等领域为数十家客户提供机器人自动化解决方案和技术服务。
融资

产品包括两指-三指产品(类似Robotiq)
https://v.qq.com/x/page/o076123zplq.html
抓取力度精确可控,因为是电动夹爪,其手指行程可达到100mm,可实现精确力控,能够执行500-800万次稳定抓取。其产品通过视觉识别和算法来确定抓取部位。同一个机器人手爪可以满足不同大小、软硬物体的抓取,重复定位精度达0.02mm。形象地说,「大寰机器人」既可以抓取易碎的灯泡,也可以抓取沉重的货物。
缺点就是价格昂贵。据了解,黑色五指的变胞仿人手价格在十几万元,而白色三指的变胞手,价格也在数万元。
▢慧灵科技 - A轮 - 深圳 - 平行两指
官网:https://www.hitbot.cc
慧灵科技是一家专注于机器人末端执行器和桌面级协作机械臂技术研究的高科技公司。 慧利用自身全套技术解决方案的优势,从电机设计、编码器设计、伺服控制、本体设计到运动控制,将电动手爪、桌面级协作机械臂的性价比做到极致,突破了行业极限,助力机器人系统集成商低价高效的进行工厂自动化产线的改造。目前己与创维、众为兴、深视智能等近20 家公司达成合作。
EFG系列电动夹爪(类似Robotiq Hand-E产品)
内部集成伺服系统的小型电动夹爪,适用于实验室、医院等无气源场合,根据控制方式分为I/O控制(K)与脉冲信号控制(M),根据控制器的区别分为:NPN型(N)和PNP型(P),根据行程分为EFG-8、EFG-12与EFG-20。
目前,慧灵科技的电动夹爪售价在1000-2000元,价格亲民。
▢钧舵机器人 - 天使轮 - 北京/苏州 - 多指灵巧手
官网:http://pmt319475.isitecenter.cn
苏州钧舵机器人有限公司是一家专注于高端智能灵巧机械手产品研发生产的高科技公司,面向汽车、物流、服务机器人等行业日益柔性化的功能需求,为客户提供智能机械手产品及抓取系统解决方案。公司核心研发团队均来自于哈工大、北航、中科院等知名院所,开发出了以JQ3-5机械手为代表的能用的、实用的、好用的钧巧系列产品,正逐渐成为国内末端执行器行业的领军企业。
产品线从高端3指向中低端平行2指研发
设计有亮点,相比于五指灵巧机械手,钧巧JQ3-5采用了更具抓取效率的模块化三指可重构构型,能在不损失或微损失灵巧性的前提下,大幅降低机构及电控系统的复杂度,能够实现捏、握、抱、夹等动作,具有力感知能力,力度可调地抓取规则、不规则形状的工件,普适性强,抓取范围从几毫米至二百毫米,自重不到1kg,负载能力5kg。
04
末端夹爪的未来
末端夹爪市场受限于价格高、定制化强两大问题
中高端夹爪动辄十几万的价格,即使是常用的平行两指电动夹爪,国外产品也动辄上万,对用户来讲,投资太高,回报周期长,这是限制行业的应用和发展一大问题,但一边随着人口红利消失,工人工资不断提升,另一面是国产替代进口,不断降低产品价格,可以看到未来广泛应用的趋势。
定制化强也是一大限制因素。从前文就可以看出,末端执行器形态各异,就是为了满足客户多种多样的需求,看到一个统计,末端执行器的种类至少在四十种以上,而且很多需要根据客户需求定制,这就导致无法向通用机器人那样大量出货,限制了行业快速发展。
但是,软体抓手的出现、多指灵巧手的趋势,对任务通用性的适应越来越强,未来随着机器人大量出货,末端执行器也将迎来快速发展。
看好柔性夹爪和多指灵巧手
应用软材料设计制造的软体抓手容易起量。软体手应用柔性材质可达成变形的效果,能够自适应地包覆住目标物体,而无需预先知道其准确的形状和尺寸,有望解决异形、易损物品大规模自动化生产问题。而且通过食品药品安全认证,在食品、药品、生鲜果蔬以及3c电子分拣等场景都能很好应用,有一定通用性,容易起量。
多指灵巧手是未来趋势。虽然现在多用于实验室科研,尚未大规模量产和工业使用,同时价格昂贵,但是最接近人手的产品,拥有更多的自由度,更能适应复杂的环境,可完成多任务,通用性极强,能够实现多种构态间的灵活变换,具有捏、夹、握等多样化的抓持与操作能力,大大超越了传统多指机器手的功能范围。
未来随着技术成熟、价格不断下降,多指灵巧手逐渐在工业大面积应用是想象得到的趋势。
与协作机器人相辅相成
协作机器人最近发展很快,协作机器人起量有望带动夹爪市场的起量,因为协作机器人主要面向轻量环境,和夹爪的应用场景相匹配,反过来,创新的夹爪也拓展了机器人的应用领域。
技术是核心
国外机器人技术对国内领先太多,国内机器人团队包括夹爪团队,核心依然是将更多精力投入到传感器、电机等核心零部件研发,最终实现关键部件全部自主开发,同时研发整体驱动的方案,在价格降低后,才会进一步刺激销量,一旦有了规模效应,也将进一步降低成本,才能真正与国外大厂抗衡,形成自身核心竞争力。
引用一句点评结尾
国内夹具企业要么走质优价廉,要么实现大刀阔斧的创新,除此之外不存在任何奇技淫巧。
PS:本文为格物资本关于机器人末端夹爪行业的初步研究部分内容,欢迎业内人士共同探讨该行业。
格物资本致力于成为AIOT领域领先的精品投行,通过深入的研究和精准的投资对接服务,为行业领先公司提供咨询式投行服务。
-
焊接
+关注
关注
38文章
3211浏览量
59978 -
工业机器人
+关注
关注
91文章
3373浏览量
92777 -
机械手
+关注
关注
7文章
338浏览量
29703
原文标题:机械手研发展今天,能像人手一样灵巧吗?
文章出处:【微信号:GeWu-IOT,微信公众号:物联网资本论】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
深度解析!RK3568 加持机械臂是如何实现颜色识别与抓取的?

RK3568国产实验箱+人工智能机械臂:跳舞、叠罗汉、夹方块、积木搬运案例全解!
机械臂的高效运作,连接器起关键作用
【原创】 drawbot 平面机械臂scara写字画画机器人DIY教程贴
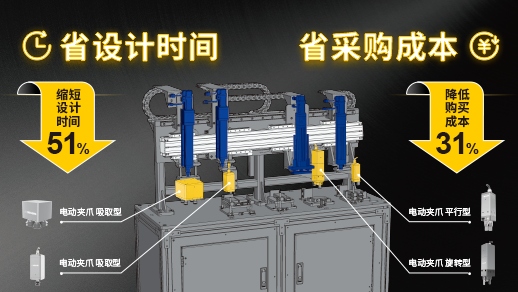
米思米全新上市的经济型电动夹爪,如何解决这些问题?
电动夹爪PK气动夹爪,优势何在?
大象机器人开源协作机械臂机械臂接入GPT4o大模型!


国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享
基于六维力传感器的机械臂自动装配应用

如何去提升机械臂的位置控制性能?

电动夹爪的运动控制方案

求一种电动夹爪的运动控制方案







 工商网监
工商网监
评论