 用塑料瓶盖制作四轴无人机
用塑料瓶盖制作四轴无人机

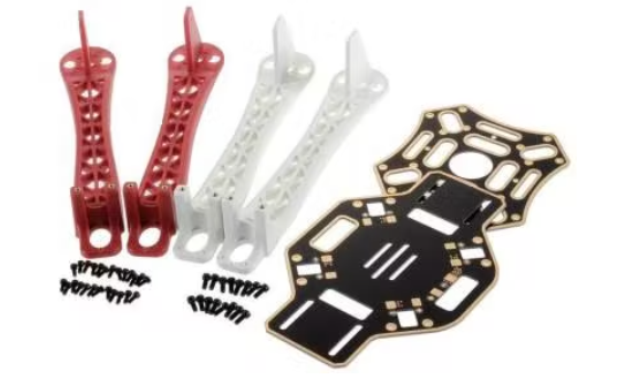
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
DIY
+关注
关注
176文章
900浏览量
360440 -
无人机
+关注
关注
237文章
11427浏览量
197064
发布评论请先 登录
相关推荐
热点推荐
四轴无人机设计
毕设四轴无人机考研结束了,不出意外考的很差,老师在考试之前就说过我有些浮躁,我现在有点怀疑自己的能力了,等二战吧,毕业论文开始了。这次采用的是匿名科创的拓空者飞控,stm32f407主控板,其实我
发表于 07-19 08:05
制作无人机的小型PCB
描述使用 ESP32 的无人机飞控这是我们制作自己的无人机的小型 PCB,它使用 ESP32 和 MPU-6050 进行轴控制。电机控制是通过 PWM 完成的。我们仍在忙于对其进行编程
发表于 08-01 07:04




评论