 六轴机器人的结构图
六轴机器人的结构图
六轴机器人的结构图
六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。
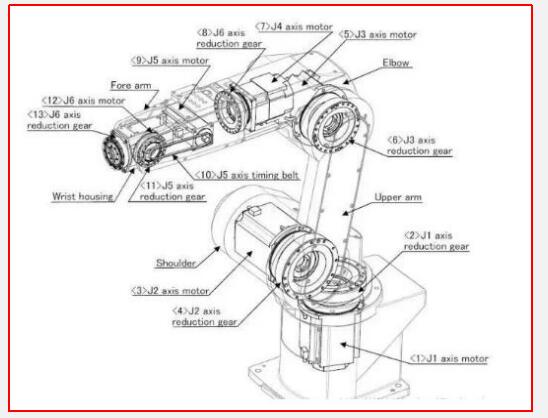
采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。
此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。
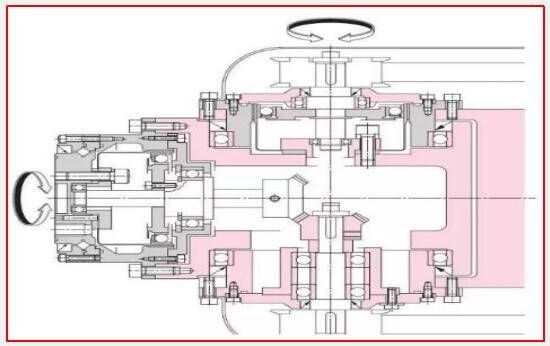
常见的机器人腕部结构如图2~图4所示,在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等。

六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动。小型的六轴关节机器人的腕部关节主要采用谐波减速器。图4较为详细地描述了常见的六轴关节机器人的腕部结构,其腕部关节用到了两个谐波减速器,两个同步齿型带传动输入,中间还用到了一对锥齿轮副传动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28468浏览量
207358 -
六轴机器人
+关注
关注
0文章
42浏览量
4418
发布评论请先 登录
相关推荐
安川工业机器人结构
的连接线缆,也可以根据现场的实际需求来进行选配。 --机器人本体各部分组成:由图可知安川6轴工业机器人可分为机器人底座、S头、L臂、U臂、手腕法兰盘,对应一到

嵌入式学习-飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
六轴传感器主要适用于需要测量和监控物体在三维空间中的运动、速度、方向和姿态的场景。应用场景非常广泛,涵盖了许多不同的领域和行业。具体的应用包括但不限于:1.机器人控制:六
发表于 12-02 09:47
飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
六轴传感器主要适用于需要测量和监控物体在三维空间中的运动、速度、方向和姿态的场景。应用场景非常广泛,涵盖了许多不同的领域和行业。具体的应用包括但不限于:1.机器人控制:六
发表于 11-29 08:57
焊接机器人六个轴分别是什么作用
焊接机器人是现代工业自动化中的重要工具,其灵活性和高效性极大地提升了焊接质量和生产效率。在焊接机器人中,“六轴”是一个常见的结构设计,这

如何正确操作六轴焊接机器人
自动化技术的迅猛发展,六轴焊接机器人已成为现代制造业不可或缺的一部分。它们不仅提高了生产效率,还确保了焊接质量的一致性和可靠性。为了充分发挥其性能,掌握正确的操作方法和注意事项非常重要。今天
六轴焊接机器人多久检修一次
随着工业自动化的发展,六轴焊接机器人在制造业中承担了不少工作内容,成为不可或缺的力量,为了确保这些机器人能够长期稳定地运行,定期的检修和维护至关重要。今天跟随创想焊缝跟踪系统小编一
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17
六轴焊接机器人的操作流程
随着工业自动化的不断发展,焊接技术也迎来了革命性的变革。六轴焊接机器人凭借其高精度、高效率和高稳定性的特点,在众多行业中得到了广泛应用。六轴

集成芯片内部结构图
集成芯片内部结构图是一个相当复杂的图表,因为它包含了大量的电路元件和细微的连接。以下是一个简化的概述,以帮助理解其基本的内部结构。
集成芯片结构图怎么画
集成芯片结构图的绘制需要专业的绘图工具和知识,因为它涉及到芯片内部的微观结构和复杂电路。以下是绘制集成芯片结构图的一般步骤和注意事项。
埃斯顿获首张工业六轴机器人cETLus证书
3月1日,埃斯顿自动化通过了Intertek的严格测试与审核,成功获得首张工业六轴关节机器人cETLus证书,开启迈向国际化战略的新阶段。
高压放大器在介电弹性体折纸术软体机器人中的应用
,机器人被赋予了更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足刚性
发表于 02-27 17:15
ABB机器人拓展其免费的Wizard简易编程软件的应用范围
近日,ABB机器人拓展了其免费的Wizard简易编程软件的应用范围,除了协作机器人外,现在该软件也可应用于由OmniCore™控制器驱动的六轴工业机






 工商网监
工商网监
评论