 六轴机器人工作原理
六轴机器人工作原理
六轴机器人
六轴机器人是机器人的工作最开始的机器人设备,包括了大多数出售的机器人。他们共同的机器人提供最大的灵活性,但比更昂贵的比他们的对口机器人具有更少的轴。
六轴机器人的工作原理
机器人是一种能自动化定位控制并可重新汇编程序以变动的多功能机器。它有多个机器人主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
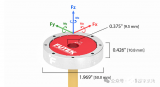
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机器人的自由度。
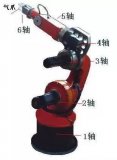
为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机器人的灵活性越大,通用性越广,其结构也越复杂。一般机器人有2~3个自由度。
控制系统是通过对机器人每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
六轴机器人的运行原理
六轴机器人由执行机构、驱动系统、控制系统组成。工业机械手的基本工作原理是在PLC程序控制的条件下,采用气压传动方式,来实现执行机构的相应部位发生规定要求的,有顺序,有运动轨迹,有速度和时间的动作。同时按其控制系统的信息对执行机构发出指令,可对机械手的动作进行监视,当动作有错误或发生故障时即发出报警信号。位置检测装置随时将
执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以的精度达到设定位置。其中驱动系统是驱动工业机械手执行机构运动的,主要由动力装置、调节装置和辅助装置组成。常用的驱动系统有液压传动、气压传动、机械传动。而控制系统是支配着工业机械手按规定的要求运动的系统。
-
机器人
+关注
关注
211文章
28750浏览量
208929 -
六轴机器人
+关注
关注
0文章
42浏览量
4457
发布评论请先 登录
相关推荐
安川工业机器人结构

嵌入式学习-飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景

语音识别机器人的工作原理
如何正确操作六轴焊接机器人
abb机器人工具坐标系问题
深入了解六轴力传感器:原理、分类与应用
码垛机器人的组成和工作原理
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计

机器人是如何工作的 机器人工作原理解析





 工商网监
工商网监
评论