 超详细单片机学习汇总资料,STM32大神笔记
超详细单片机学习汇总资料,STM32大神笔记
1、NEC协议在发送的时候,会有560us的38KHz的载波信号,而在接收的时候这部分载波信号被认定为低电平,而剩余的(2.25ms-650us)的逻辑“1”和(1.12ms-650us)的逻辑“0”时间则被认定为高电平。
2、在单位时间内的位移被定义为速度,速度有线速度和角速度之分,分别对应两种传感器测量这两种不同的速度:线速度传感器(加速度计)、角速度传感器(陀螺仪)。
前者多应用在静态或者低慢速运动中的姿态求解,后者多应用在动态运动中姿态求解。
3、根据标准约定,零加速度(或零 G 准位)通常定义为相当于最大输出值(12 位输出为 4096,10 位输出为 1024 等)一半的输出。对于提供 12 位输出的加速度计,零 G 准位将等于 2048。
输出大于 2048 表示正加速度。输出小于 2048 表示负加速度。加速度的数量通常用单位 g (1g = 9.8m/s2 = 重力加速度)表示。
通过确定测量的输出与零 G 准位之间的差值,然后除以加速度计的灵敏度(用计数/g 或 LSB/g表示)来计算加速度。
对于提供 12 位数字输出的 2g 加速度计,灵敏度为 819 计数/g 或 819 LSB/g。加速度等于:a = (Aout - 2048)/(819 计数/g),单位为 g。
4、加速度计测得的加速度的方向和设备设定的坐标系是相反的,因为原理表明在测量力的时候采用的是非惯性系参考系,而我们高中时代研究的坐标系是惯性系参考系,前者在物体进行运动产生加速度时,假想一个与速度方向相反的力作用在物体上,这个力就是惯性力;后者我们说不存在惯性力,只说存在惯性,因为在惯性坐标系中,我们研究的是物体,而非坐标系(即假定坐标系相对地球静止),当我们把坐标系也考虑在内时,当坐标系运动,就产生了惯性力f,这种力作用会假想作用在物体上,只是与运动方向相反。
5、由上可知,加速度计的本质是测量力而非加速度。
6、NRF24L01工作在2.4GHz的频段,由于频段频率较高,所以传输速率较快,为2Mbps。
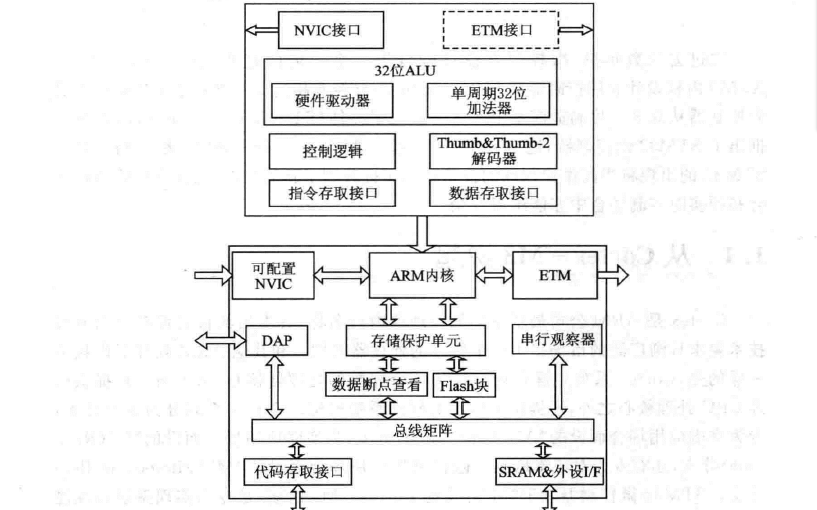
7、STM32的闪存模块由:主存储器、信息块和闪存存储器接口寄存器3个部分构成。
主存储器用来存放代码和const常量;信息块由两个部分组成:启动程序代码、用户选择字节。
最后的闪存存储器接口寄存器用于控制整个对闪存区域的操作。
8、CPU的运行速度比FLASH的操作速度快的多,一般FLASH的最快访问速度≤24Mhz。如果CPU的速度超过这个频率,那么在读取FLASH的时候必须加入等待时间(FLASH_ACR设置)。
9、FLASH编程时,写入必须为半字(16位)。并且在写入的时候必须保证所写区域的数据必须为0xFFFF。
10、STM32的FSMC有HADDR[27:0],其中[27:26]用来选择BANK区域的4个不同块。
剩下的[25:0]则用来连接外部存储区域的地址线FSMC_A[25:0]。
如果数据宽度是8bit,此时的HADDR[25:0]和FSMC_A[25:0]是完全对应的。
如果数据宽度是16bit,此时的HADDR[25:1]和FSMC_A[24:0]是对应起来的。
需要注意:无论数据宽度是多少,外部的FSMC_A[0]和A[0]总是对应的。
11、关于LB和UB的信号控制是由硬件自动控制的,当AHB的数据宽度小于外部存储器的数据宽度时,此时LB和UB的控制信号自动产生(比如字节读取/写入16bit的外部存储器)。
12、 __attribute__ (函数属性、变量属性、类型属性等)。如果在使用SRAM时,可以采用u32 sram_array[xx] __attribute__ ((at(0x68000000))代表将外部SRAM的空间全部给了sram_array这个变量,他具有在at0x68000000这个地址的属性。
往里面写值就直接在SRAM里面写值。
13、
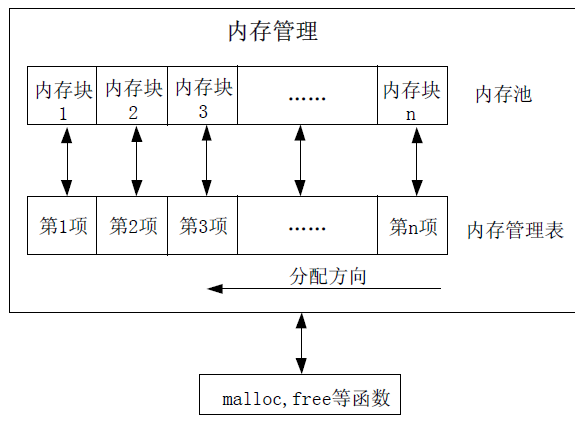
内存管理有一种方式叫做分块式内存管理。
注意表中的分配方向,从顶到底。每一项对应一个内存块。里面的数值代表了内存池的状态:如果为0,表示该内存没有被分配;如果非0,那么数值的大小就表示了该块内存被连续占用的内存数。
比如说数值为20,意思是包括该项在内的内存块被连续占用了20块分给了指针。
14、SD卡的分类:
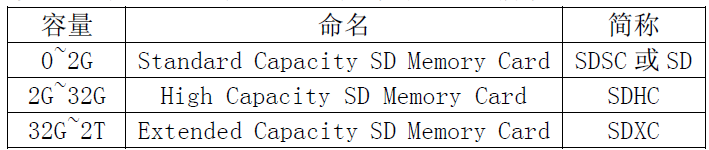
一般的SD卡支持两种传输模式:SD卡模式(SDIO)、SPI模式。显然前面一种是专用模式,所以速度比较快。
15、常用的汉字内码系统有GB2313、GB13000、GBK、BIG5(繁体)。其中GB2313只有几千个汉字,而GBK则有2万多汉字。
16、要显示汉字,采用的方式如果用点阵的形式是不可取的,因为这无法查找汉字。采用的方式就是内码系统。
GBK标准中,一个汉字对应2个字节:前者称为区(0x81~0xFE)后者为(0x40~0x7E)和(0x80~0xFE)。前者有126个区,后者有190,那么可以显示的汉字数量有126*190=23940个。
根据这两个值用来查找字库,字库中存放的还是每个汉字的点阵数据。
这个字库非常大,如果是16*16的字体,那么一个字体就需要32个字节,如此说来需要23940*32=748K的空间,可见非常大,所以需要外部的Flash来存储这个字库。
17、由于汉字内码系统不具有国际通用性,但是Unicode几乎把所有的语言都放置进来,这样在单片机中操作汉字时,就需要将GBK和Unicode转化。
尤其是在FATFS中,创建中文文件名和读取中文文件信息时需要将Unicode换转为GBK后再进行修改操作,再反转换成Unicode保存修改。
这么说,两者的存在是由于标准的不统一,并且Unicode中只有6064个汉字,而GBK显然是一种汉字扩展。
18、BMP图片编码的顺序是从左到右,从下到上。
19、VS1053是一款高性能的数字音频解码芯片,从SD卡中将mp3等音乐音频文件通过SPI送给VS1053后,由其进行音频解码,输出音乐给耳机。
耳机驱动可以采用TDA1308芯片,这款芯片为AB类耳机驱动芯片。

20、IAP(In Application Programming)在应用编程是为了后期开发更新程序方便而提出的概念。具体的实现方法如下图所示:
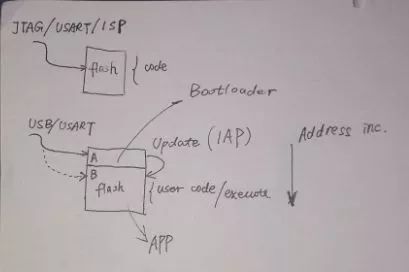
在普通编程中,flash中的code是通过JTAG和ISP等工具下载到单片机中。
而在IAP编程中,flash被分区为A和B两个区域,A区域只允许用USB/USART等方式下载,此区域作为更新B区域的代码用。
B区域则是用户的code区域,真正的代码在这里被执行,放置的就是app。
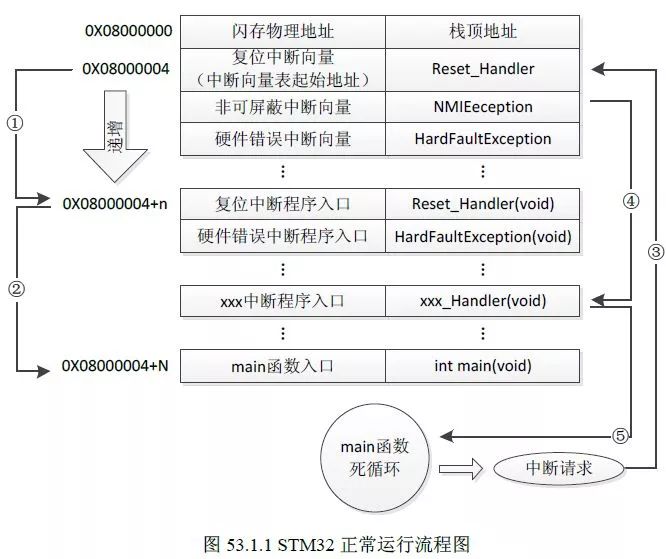
上图表示STM32正常运行的流程图,可以看到上电复位后系统从0x80000004处开始运行程序,这里放置的是复位中断向量,然后跳转至复位中断程序入口后再跳转至main函数运行用户的程序。
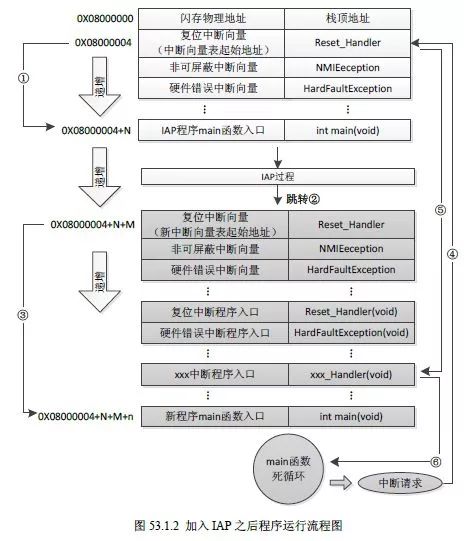
上图表示加入IAP后的STM32程序运行流程图。可以看到上电复位后跳到IAP程序的main函数处运行IAP过程(这个过程就是把下面灰底色块的程序代码烧进B区域à代码更新)。
后面的过程和STM32正常运行一样,如果出现中断请求,还是跳转到A区域中的中断向量表中,然后再跳转到B区域的中断服务入口。
21、USB有四根线,VCC、GND、D+、D-。在USB主机上,D+和D-均通过一个15K的电阻接地,这样两条线均为低电平。
在USB设备中,对于高速设备会在D+通过一个1.5K的电阻接到VCC,而低俗设备会在D-通过一个1.5K的电阻接到VCC。
这样主机就可以通过D+和D-的高电平的到来来检测是否有设备接入,并且识别高低速设备。
22、UCOSII是一种实时操作系统,具有执行效率高、占有空间小(最小内核2KB)、实施性能优良、扩展性强和移植性强等优点。
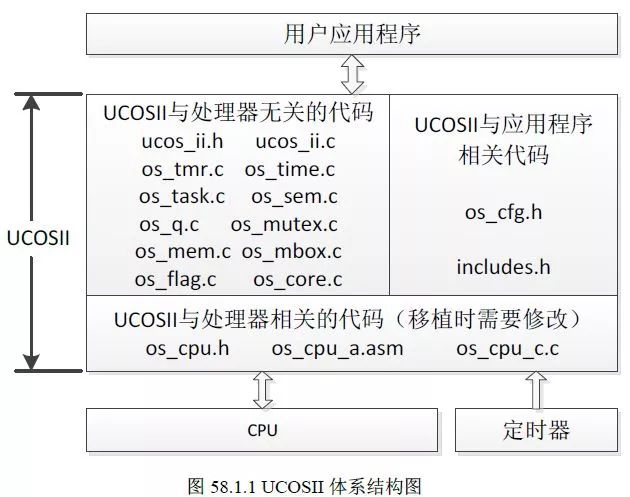
UCOS具有多任务并发工作的特点(注意,任何时候只有一个任务能够占用CPU。并发只是任务轮流占用CPU而不是同时工作)。
最大支持255个任务并发工作。
-
传感器
+关注
关注
2551文章
51106浏览量
753651 -
存储器
+关注
关注
38文章
7492浏览量
163849 -
加速度计
+关注
关注
6文章
702浏览量
45897
原文标题:STM32大神笔记,超详细单片机学习汇总资料(干货分享4)
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
STM32单片机学习笔记(6):PWM波形产生
STM32和51单片机使用教程之实例说明资料免费下载
STM32大神笔记,超详细单片机学习汇总资料






 工商网监
工商网监
评论