 实例S7-1500PLC连接SINAMICS V90伺服系统实现位置闭环控制
实例S7-1500PLC连接SINAMICS V90伺服系统实现位置闭环控制
S7-1500 运动控制功能支持旋转轴、定位轴、同步轴和外部编码器等工艺对象。并拥有轴控制面板以及全面的在线和诊断功能有助于轻松完成驱动装置的调试和优化工作。
S7-1500 支持多种连接方式。可以使用 PROFIBUS DP 和 PROFINET IO 连接驱动装置和编码器,也可以使用模拟量输出模块(AQ)连接带模拟设定值接口的驱动装置并通过工艺模块(TM),读出编码器的信息。本文中所涉及的例子就是使用第二种方式。
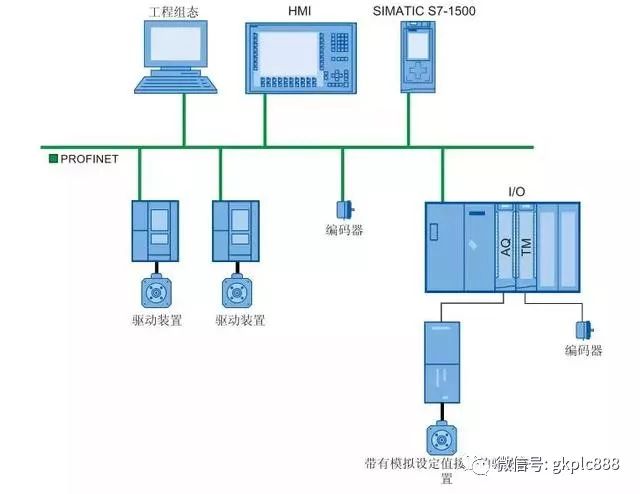
图 2-1 连接方式示意
2.2 SINAMICS V90
SINAMICS V90 是西门子推出的一款小型、高效便捷的伺服系统,可以实现位置控制、速度控制和扭矩控制。
使用 V90 的速度控制功能可以与 S7-1500 运动控制功能配合使用,接收 S7-1500 模拟量模块发出的+-10V 模拟量信号做为速度给定,并通过 PTO 功能反馈位置信号给 S7-1500,在 S7-1500PLC 中实现闭环位置控制。
3、 应用项目配置示例
3.1 S7-1500 组态
3.1.1 组态硬件配置
由于需要模拟量输出信号来控制速度给定,并接收来自 V90 的脉冲反馈信号,所以 S7-1500 系统中至少要配置 1 块模拟量输出模块和 1 块高速计数模块,考虑到 V90 给出的位置反馈信号是 5V 差分信号,S7-1500 系统中也要配置能够接收5V 差分信号的高速计数模块。还需要 1 块数字量输出模块来为 V90 提供使能信号。
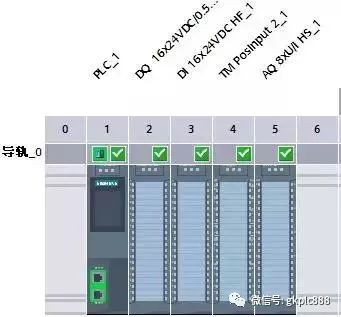
图 3-1 S7-1500 模块配置
3.1.2 组态工艺对象
驱动装置组态
首先在工艺组态中添加一个定位轴,工艺对象一般的组态方法请参考《S7-1500运动控制使用入门》。
由于 V90 接收的是+-10V 模拟量信号,所以模拟量输出模块也要设置输出范围为+-10V。驱动装置类型选择“连接模拟量驱动装置”并在“输出”后面选择模拟量输出的变量名称。为了在 PLC 内激活使能时(如激活 MC_Power 功能块 Enable 管脚)能够把使能信号传递给 V90,勾选激活启用输出,并且选择输出变量名称。
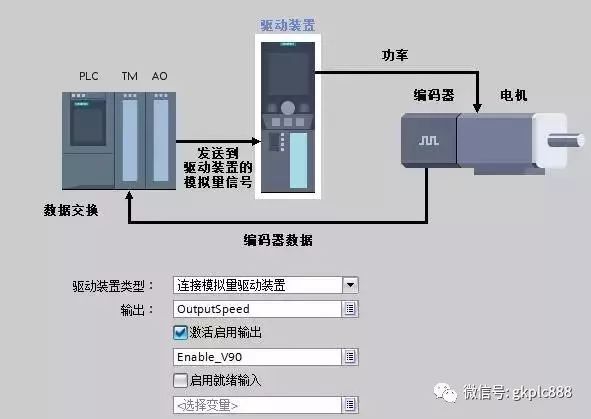
图 3-2 驱动装置选择
需要注意的是输出只能选择变量名称而不能选择绝对地址,所以必须提前定义好变量名称。

图3-3 定义变量名称
只有定义好的变量名称才能在选择 PLC 变量时显示出来

图 3-4 选择变量
位置反馈组态
在本地模块的 TM PosInput2_1 中选择参数设定。
设置通道操作模式为运动控制的位置检测(必须这样设置,才能在随后的编码器连接中选择高速计数模块 TM PosInput2_1 及其通道号)。编码器信号类型选择增量编码器(A、B、N),反向选择暂不勾选,如果在调试时 PLC 给出的速度给定方向与编码器反馈方向相反,就可以勾选反向来校正编码器反馈方向。
建议信号评估选择四重,这样可以增加位置反馈信号的精度。由于 V90 可以提供信号 N(0 脉冲信号),所以参考标记 0 的信号选择增量编码器的信号 N。接口标准选择 RS422、对称。
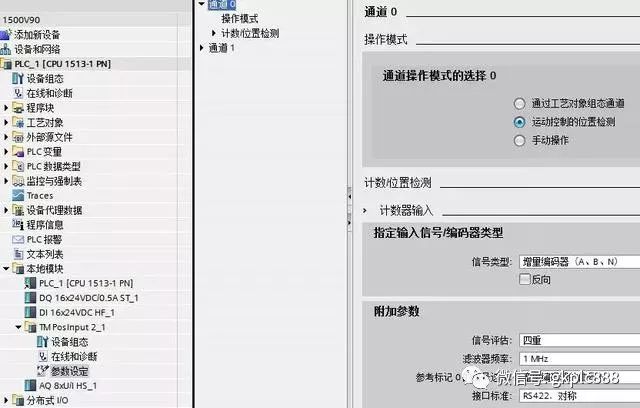
图 3-5 高速计数模块组态
组态编码器连接时选择通过工艺模块(TM)进行连接,并且在选择工艺模块中选择高速计数器通道 0。
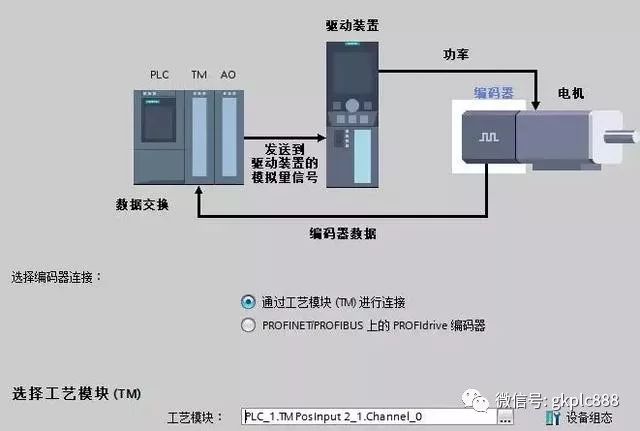
图 3-6 选择编码器连接
编码器类型选择增量式旋转式。单转步数填写 V90 每转输出脉冲个数的 4 倍(信号评估选择了四重),这里填写 4096(4*1024)。增量实际值中的位填写0。
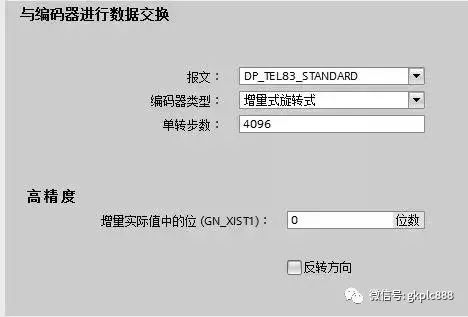
图 3-7 填写编码器参数
3.2 V90 配置
3.2.1V90 输入输出信号
V90 的参数很多,更详细的参数含义及设置方式请参考 V90 操作说明,这里只描述与本例相关的参数设置。
V90 支持速度控制方式,在此方式下 V90 接收来自 S7-1500 的+-10V 模拟量速度给定信号,并把位置值通过 RS422 标准的脉冲信号反馈给 S7-1500,在 S7-1500 中实现闭环位置调节。这种模式下 V90 本身不设置位置闭环。使能信号也需要 S7-1500 提供,这样可以保证在 S7-1500 建立位置闭环的同时,把使能信号发给 V90。
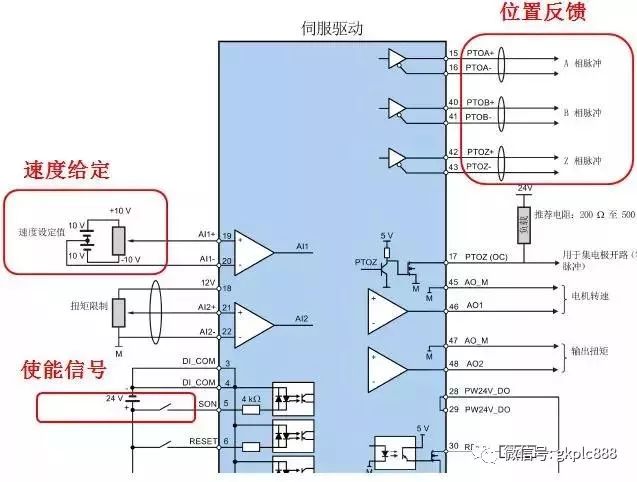
图 3-8 速度模式下的 V90 输入输出信号
3.2.2 V90 相关参数设置
本中使用 SINAMICS V-ASSISTANT 软件来设置 V90 的参数。首先要设置 V90 操作模式为速度模式,即设置参数 p29003 为 2。

图 3-9 设置速度控制模式
本例中使用 V90 的 X8 接口的 DI1 作为使能输入,即设置参数 p29301 为 1。

图 3-10 设置使能信号
设置 V90 每转线数,也就是电机每圈的脉冲个数。为了与 S7-1500 中的参数相相对性(四重评估,每转步数 4096),这里设置为 1024。
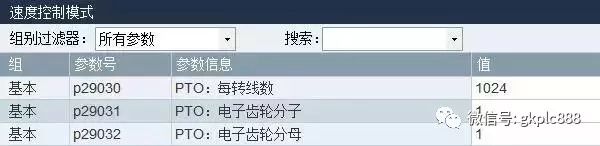
图 3-11 设置每转线数
3.3S7-1500 与V90 接线
3.3.1使能信号连接
在本例中针对 DO 模块的第 0 通道,(微信:503660666),DO 模块的 1 端子与 V90 X8 接口的 5 端子相连、DO 模块的 10 端子与 V90 X8 接口的 3 端子相连。DO 模块的 9 端子和 10 端子分别要连接 24V+和 0V。其中 DO 模块的 10 端子与 V90 X8 接口的 3 端子连接还起到两个系统的等电位连接的作用。
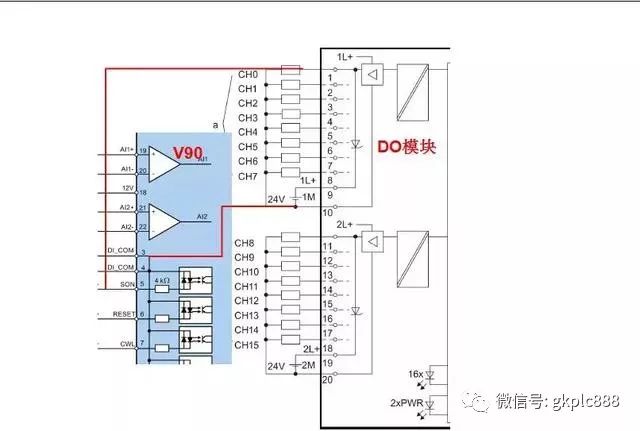
图 3-12 使能信号的连接
3.3.2 速度给定连接
AO 模块输出+-10V 电压信号,针对于第 0 通道 1、2 端子短接后连接 V90 X8 端口的 19 端子,3、4 端子短接后连接 V90 X8 端口的 20 端子。
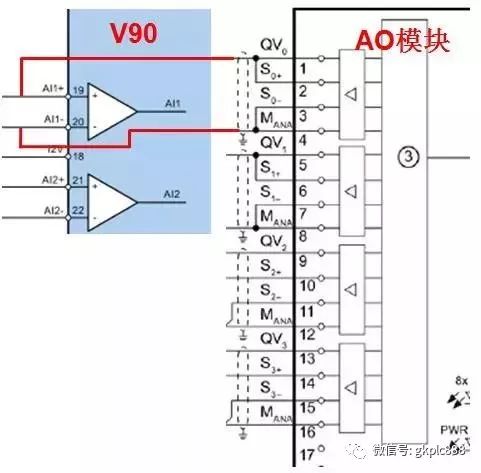
图 3-13 速度给定连接
3.3.3 位置反馈连接
分别连接 V90 X8 端口的 15、16 端子到 TMPosInput 模块 1、2 端子;40、41到 3、4 端子;42、43 到 5、6 端子。
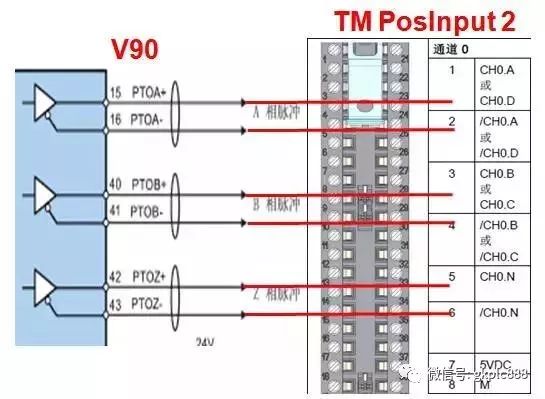
图 3-14 位置反馈连接
3.4 使用分布式I/O ET200SP连接V90
除了前面所描述的使用 S7-1500 中央机架模块以外,还可以使用 ET200SP 上的模块连接 V90。新一代的分布式 I/O ET200SP 使用简单,结构紧凑,性能卓越,支持 PROFINET 网络;可以实现更灵活的配置。
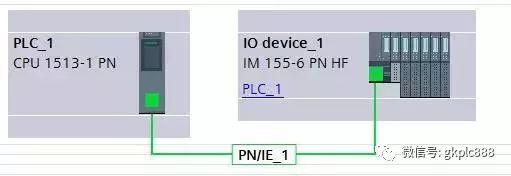
图3-15 使用分布式 I/O ET200 SP
3.4.1设置等时同步
闭环运动控制必须有很好的实时性,所以必须设置等时同步。
在网络视图中用鼠标双击连接线“PN/IE_1”在下边的“属性”、“常规”页面内选择“同步域”、“Sync-Domain_1”,设置“PLC_1.PROFINET 接口_1”的“同步角色”为“同步主站”,设置“IO_device-1”的“RT 等级”为“IRT”。
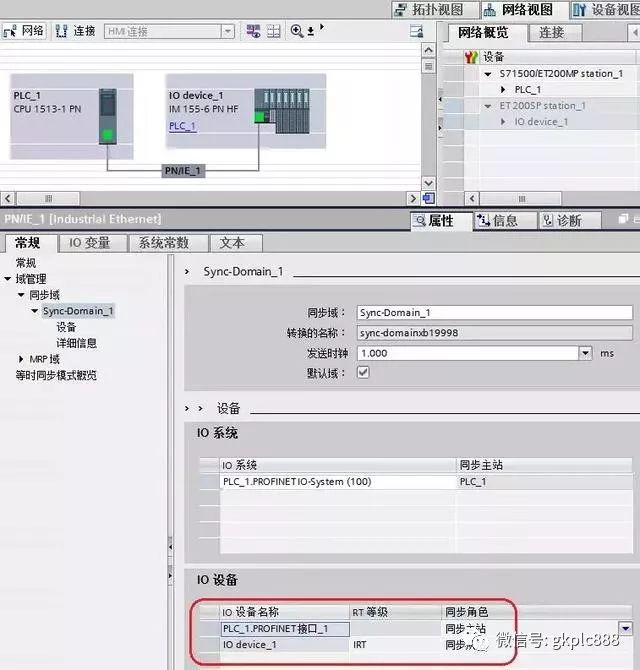
图3-16 设置等时同步
还需要设置实际的网络拓扑,在拓扑视图中拖拽连接两个设备的实际网络接口。
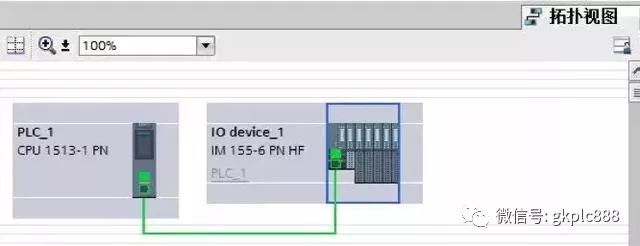
图 3-17 设置网络拓扑
在“IO_device_1”的设备视图中选择“属性”、“常规”、“等时同步模式”页面,然后勾选站点以及站点上模块的“等时同步模式”,如下图所示:
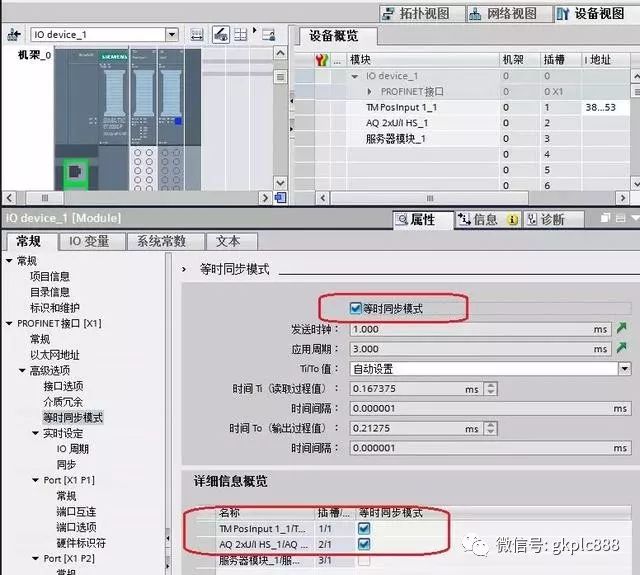
图 3-18 设置模块的等时同步
3.4.2设置OB91的循环时间
OB91 是 S7-1500 运动控制的核心组织块,为了更好的实现运动控制功能,需要把OB91 的循环时间同步到总线。具体操作过程是鼠标在 OB91 上点击右键,在弹出的菜单中选择属性,就会弹出以下页面。在页面中选择“同步到总线”。可根据应用情况选择“因子”,增加“因子”可减轻 CPU 负荷,但会影响控制效果。

图3-19 设置 OB91 的循环时间
3.4.3 工艺组态与接线
工艺组态中把驱动接口和编码器反馈接口分别设置到 ET200SP 的模块上,具体的模块组态方法和工艺组态方法与 3.1.2 章节描述的一样。
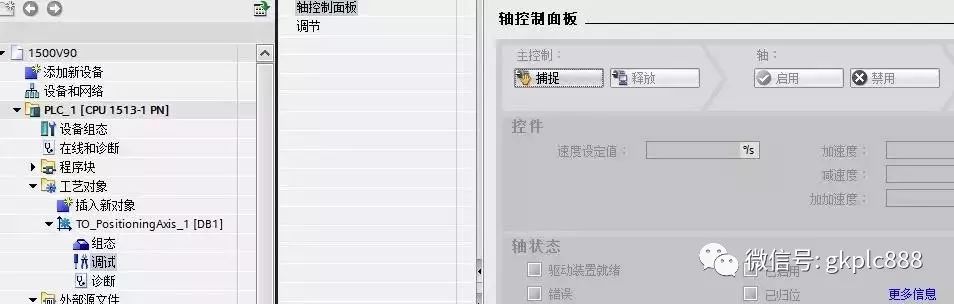
3.5 设备调试
至此 S7-1500 与 V90 的组态配置与接线都已经初步完成,可以打开工艺对象的调试界面进行调试,然后就可以编写控制程序了。具体内容可参考帮助文档,这里不再详述。
-
运动控制
+关注
关注
4文章
593浏览量
33016 -
伺服系统
+关注
关注
14文章
576浏览量
39387 -
S7-1500
+关注
关注
3文章
301浏览量
6545
原文标题:实例 S7-1500PLC 连接 SINAMICS V90 伺服系统实现位置闭环控制
文章出处:【微信号:gongkongworld,微信公众号:工控资料窝】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

基于S7-1200的V90的位置控制
基于S7-1200实现V90的MDI功能


通过PROFINET连接V90PN实现位置闭环控制

基于S7-200实现V90位置控制的MDI功能介绍

基于S7-200实现V90速度控制设计应用

如何通过FM353实现与V90的位置控制








 工商网监
工商网监
评论