 以电机的最高转速为目的电子齿轮比设置
以电机的最高转速为目的电子齿轮比设置
伺服驱动器的位置控制模式,必须有电子齿轮比功能,才能顺利地与伺服控制器配合,其电子齿轮比的设置有不同的方法和目的,电子齿轮比一般分成分母及分子两项参数设置。
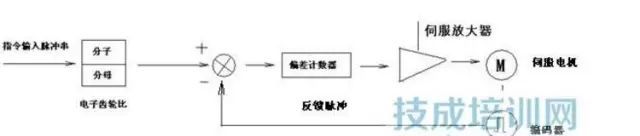
如上图:从上位机发出的指令脉冲串。经过电子齿轮比转换为一定比例的输入脉冲信号,与编码器反馈的脉冲信号相匹配,产生偏差脉冲信号,再经过伺服放大器驱动伺服电机。
1、以电机的最高转速为目的电子齿轮比设置
例如,伺服电机的额定转速为3000转/分;编码器的每圈产生的脉冲数10000脉冲数/圈。
通常PLC控制器输出的最高脉冲频率为100KHZ。
2、计算说明
要达到伺服电机额定转速3000转/分,需要输入的指令脉冲频率为
10000×3000/60s=500000HZ=500KHZ
3、设置电子齿轮比
PLC能输出的最高脉冲频率为100KHZ,必须与编码器反馈的脉冲频率相匹配。
100KHZ×A/B=500KHZ,
A/B=500/100=5/1,即A=5,B=1
式中:
A为电子齿轮比的分子
B为电子齿轮比的分母。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
放大器
+关注
关注
144文章
13719浏览量
214703 -
电机
+关注
关注
143文章
9132浏览量
146907 -
伺服驱动器
+关注
关注
22文章
496浏览量
31992
原文标题:伺服驱动器电子齿轮比的设置
文章出处:【微信号:EngicoolArabic,微信公众号:电子工程技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
请问变频电机的转速最高是多少?
我知道转速N=60f/p,我的电机铭牌上写着恒转矩调速 5到50HZ 恒功率调速50到100HZ,那最高转速是6000转/分吗?对这个变频器里如何设置呢?
发表于 12-26 06:33
1FK7063-2AF71-1RG1伺服电机的最高转速是多少?
用到7200转(满足电压限制特性曲线条件下,还需要取决于驱动模块规格吗)?问题3:高速立加上该款电机最高转速设计多少为合适?感谢。
发表于 12-12 08:21
伺服电机电子齿轮比计算方法
以带17位编码器的电机为例,伺服电机每旋转一周,伺服放大器要给伺服电机传送131072个脉冲,同时编码器反馈131072个脉冲给伺服放大器。
发表于 02-05 09:59
•12.3w次阅读
齿轮减速机配电机如何保持最高转速
由于回转齿轮减速机的旋转支承主要靠其上的两个轴承来支承,两轴承间距的增大,可增加回转减速机的旋转稳定性和承载能力。采用圆螺母调整两轴承间的轴向间隙,调整方便、可靠。更能保证回转齿轮减速机的正常运转;
高转速电机的类型和应用
高转速微型电机就是转速非常高,它的特点是:转子速度高、定子绕组电流和铁芯磁通频率高、功率密度和密度大。高转速电机具有不同于普通微型
发表于 06-25 18:11
•3651次阅读
全球最高转速伺服电机问世
新产品名为“AC Servo Drive Σ-X”,转速从此前的每分钟6000转提高至7000转。停止电机时的精度相当于环绕JR山手线1圈后以误差4毫米停住列车,此前的误差为2厘米。
汽车电子电驱动高转速齿轮技术分析
小结:为降低高转速齿轮传动的NVH噪音、提高其疲劳寿命,要制造出高精度、高质的齿轮匹配,所以给出的制造策略是:适度提高齿轮参数的精度等级、控
发表于 06-01 09:55
•371次阅读

直流电机怎么提高转速
直流电机,作为现代工业中不可或缺的驱动装置,其转速的调节对于实现高效、精确的机械运动至关重要。本文将深入探讨直流电机提高转速的方法,通过分点表示和归纳,结合具体的数据和信息,以期
伺服电机转速一般多少?最高转速能达到多少?
和最大速度。低惯量伺服电机的额定值一般为3000,最大值为5000。中高惯量伺服电动机的额定值通常1500,1000,最好是2000或1500。总之,高转矩的最大转速将非常低。伺服
松下伺服电机电子齿轮比怎么设置
电子齿轮比(Electronic Gear Ratio)是伺服系统中用于调整编码器分辨率和电机转速之间关系的参数。在伺服系统中,





 工商网监
工商网监
评论