 如何简单理解方波控制器电机控制?
如何简单理解方波控制器电机控制?
课程介绍
视频亮点展示:
亮点一:本视频也是典型的 数模混合电路,前5部视频主要讲模拟电路。如何实现无缝混搭?电路设计又需要注意哪些细节呢?这是本部视频最大亮点。
亮点二:本部视频通过硬件波形的整形、储存,以及根据 时序 来分配并动作,根据时序进行多路信号的切换,以及不同波形在不同时刻发生不同的动作。锻炼学员综合协调处理波形根据时间来锁存信号与释放信号的能力。如果以前是二元化,现在就是三元化。以前只是电压电流为主轴的波形设计,现在则是 电压电流波形在时间轴上 的分配。
亮点三:全场以实物为依托,进行 现场调试,并且手把手教会大家进行单个模块的调试与模块之间联调的方法,手把手教会并提高大家调试电路的动手能力,这也是工程师必备的最重要的一点。调试过程中遇到的很多难点、很多困难,敬请关注张飞老师如何亲自进行调试,如何克服困难,如何去分析寻找突破点。
亮点四:本部视频,张老师教会大家如何用 万用表来测量 一些元器件,有助于提高维修线路板的效率,节省时间,更多精彩的内容请关注视频。
亮点五:本视频基于前几部视频,让工程师深入到第二阶段学习,提高复杂电路的架构与设计能力,掌握到电路设计的全局观。不再像以前简单的基于元器件的使用,而是如何综合运用各种复杂器件实现各种复杂应用。
通过学习本套视频你可以获得什么?
二、学习有霍尔位置传感器 和无霍尔位置传感器的BLDC区别
①目前有位置传感器用的比较多,由于它能够准确采样转子的旋转位置,所以更能稳定可靠运行,控制方式相对来说也简单些。因此,在很多项目中得到大量使用。应用领域:特别适合大负载和静止启动的情况。比如,电动车、电动自行车、电动汽车、高铁等中均得到大量而广泛的应用。当然,毕竟马达上多个sensor ,在马达制作工艺方面增加了复杂度,增加了成本。同时,霍尔也存在一定几率的老化不良等问题,对电机的整个寿命产生一定的影响。
②由于有位置马达存在上述的弊端,无位置由于没有sensor工艺简单,同时更加安全可靠,所以在很多场合也得到比较多的应用。在一些复杂恶劣的环境、轻负载的情况下应用,比如风机,空调压缩机,汽车的冷却风扇等。但是,由于位置是根据马达的反电动势计算得来的,因此具有不可靠性。而且在马达静止情况下,由于不存在反电动势,因此转子的位置更加难以确定。所以,不适合马达在静止条件下使用。
③综上所诉,有位置的马达的驱动器比较简单,马达相对复杂,可静止启动。无位置控制的马达优点是马达简单控制器复杂,适合轻负载,非零转速启动或者在马达又一定转速下启动。
三、霍尔位置设计
如果是接电网,一般接高压,降低成本。接电网是用310V或者更高。还有一种户外移动电源供电,这种一般情况是做低压。那么,都有这么个代表。空调压缩机--高压;电动车--低压;随着bldc的快速发展,低压为代表的发展十分迅速,智能代步工具;机器人;电动工具;园林工具等等。高压和低压这两个方向发展十分巨大,快速发展的。
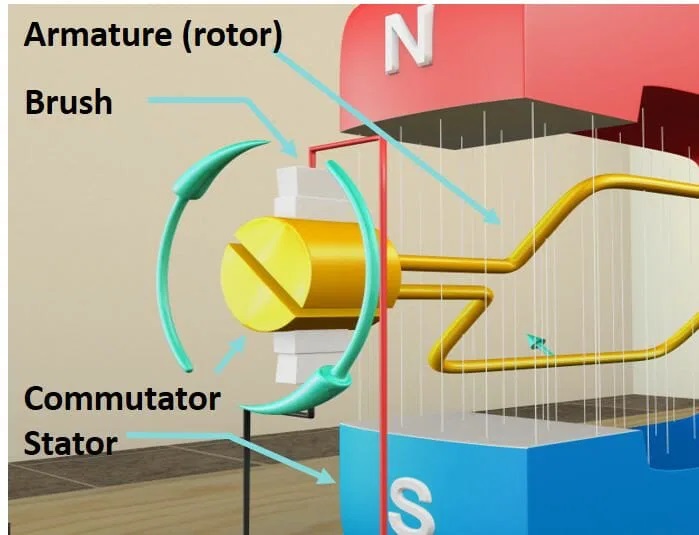
五、马达的转子、定子采样设计
BLDC 分外转子和内转子,如何整合?
外转子应用领域广泛:风扇马达、轮毂马达、多旋翼无人机航模,电动滑板(见下图)。
外转子和内转子相同工作下特性比较:外转子体积小,内转子大;但是,外转子结构复杂,强度不如内转子;
六、方波和正弦波介绍
从马达的反电动势波形来区别,可以分为正弦波和方波。这个主要是指反电动势,这个是由磁钢的充磁方向决定的。在区分马达是否正弦马达输出相两端的端电压,用手拨动马达旋转,如果端电压是正弦波就为正弦波马达,反之为方波马达。目前方波马达的控制技术成熟。正弦波复杂,驱动器控制差不多,未来空间大。但是目前主流仍是方波马达。
七、电压,转速,扭矩,功率之间关系
①功率速度扭距转换公式
②详细解释马达的转速与马达扭距之间的关系(从磁场切割的原理解释)
③详细解释马达的极对数,以及虚拟电机,马达电周期与机械周期之间的区别
④马达线圈扎数与马达扭距之间的关系;
⑤马达的电压与转速之间的关系,及马达的电流与转速,效率之间的关系,和如何调速。
对于BLDC马达,一般情况下电压越高,转速越高;反之,电压越低马达的转速越低。从这个角度来说,实行调速,可以用PWM调速法。
第二个角度讲,定子由硅钢片合成,当线包通过电流,会产生涡流损耗,此涡流的平方和电流平方成正比,随着电流增大而增大,称为铁损,从线包的损耗称为铜损,和涡流的铁损,角度来讲,电流不应过大。
当然,电压也不能够无限制的增加,随着电压的升高,一些马达控制逻辑是低压器件,存在电源转换,电压越高,电源转换付出的成本也就越多。另外,电压选择需要依靠外界提供的电能。所以在一个项目中选择马达根据情况酌情处理。
八、BLDC如何实行电压调速
本项目以三相bldc方波有位置传感器马达为实例,用全硬件的方式来搭建驱动器电路。
①三相桥电路的设计:mosfet的选型和设计;mosfet充放电电路的设计;
②半桥驱动电路的选型和讲解;
③自举充电电路的讲解:如何实现自举电容充电?
④半桥驱动前级,复杂逻辑电路如何实现?分以下几个方面:
Ø 如何用全硬件的方式实现马达正转?
Ø 如何实现马达的停止?
Ø 如何实现自取电容的充电?
Ø 如何根据霍尔的逻辑信号来实现马达的换向?
Ø 如何实现马达的调速?
九、调试部分
1. 霍尔电路的调试
2. 数字电路的调试
3. 半桥电路的调试
4. 充电电路的调试
5. 桥式电路的调试
6. 马达整机的联调
受众群体有哪些?
1、如果你还是学生,正厌倦于枯燥的课堂理论课程,想得到电子技术研发的实战经验;
2、如果你即将毕业或已经毕业,想积累一些设计研发经验凭此在激烈竞争的就业大军中脱颖而出,找到一份属于自己理想的高薪工作;
3、如果你已经工作,却苦恼于技能提升缓慢,在公司得不到加薪和快速升迁;
4、如果你厌倦于当前所从事的工作,想快速成为一名电子研发工程师从事令人羡慕的研发类工作。
张飞直流无刷电机驱动 & 碎纸机项目实战
(包括:第三部办公室碎纸机系统项目,第八部直流无刷电机驱动设计)
地址:http://t.elecfans.com/topic/26.html?elecfans_trackid=page2200
专栏课程28个课时)(点击教程即可观看)
-
传感器
+关注
关注
2550文章
51035浏览量
753080 -
电机控制
+关注
关注
3534文章
1876浏览量
268747 -
BLDC
+关注
关注
206文章
800浏览量
96870 -
方波
+关注
关注
4文章
81浏览量
32888
发布评论请先 登录
相关推荐
其利天下技术·FOC控制和方波控制的区别?分别应用场景是什么?无刷电机驱动方案


对力矩电机控制器的理解


为什么用在有齿无刷电机的控制器是方波而不是正弦波输出?
为什么用在有齿无刷电机的控制器是方波而不是正弦波输出?






 工商网监
工商网监
评论