 6自由度惯性传感器的性特点及应用研究
6自由度惯性传感器的性特点及应用研究
ADIS16375 iSensor®是一款完整的惯性系统,内置一个三轴陀螺仪和一个三轴加速度计。每个传感器都实现了业界领先的iMEMS®技术与信号调理技术的完美结合,可提供优化的动态性能。工厂校准为每个传感器提供灵敏度、偏置、对准和线性加速度(陀螺仪偏置)特性。因此,每个传感器都有其自己的动态补偿公式,可在−40°C至+85°C的温度范围内提供精确的传感器测量。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2553文章
51511浏览量
757287 -
陀螺仪
+关注
关注
44文章
794浏览量
99034 -
加速度计
+关注
关注
6文章
705浏览量
46070
发布评论请先 登录
相关推荐
Xsens新一代Sirius工业惯性传感器:精准应对高要求严苛环境挑战
Movella宣布推出新款旗舰惯性传感器,高端工业级XsensSirius系列,继著名的XsensMTi®100系列之后的新一代传感器。XsensSirius具有IMU、VRU和AHRS功能,可在

H60.XYZTR5六自由度并联机构
、生物科技等微纳操作领域。 H60.XYZTR5六自由度并联机构 H60.XYZTR5系列六自由度并联机构压电纳米定位台,是X、Y、Z、θx、θy、θz六轴运动定位台,内置高可靠性压电陶瓷作为驱动源,通过六支压电促动

线性传感器的灵敏度是什么是多少
线性传感器的灵敏度是指传感器在稳态下输出变化与输入变化值之比,它是一个重要的性能指标,用于描述传感器对输入信号变化的敏感程度。对于线性传感器

功率放大器在重力辅助式Z自由度压电惯性双向平顺驱动研究中的应用
实验名称:功率放大器在重力辅助式Z自由度压电惯性双向平顺驱动研究中的应用研究方向:精密驱动与定位实验内容:测试了其频率特性、水平负载特性、位移曲线、电压特性、分辨力及其在显微成像中的应

基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,为工业自动化提供了一套切实可行的方案。
本文针对基于机器视觉的工业机器人进行研究,主要工作包括以下几点:
(1)设计了基于 伊瑟特的六自由度机器人视觉伺服控制系统总体方案。以 ESR6B机器人
发表于 05-29 16:17
微小层面的专用惯性测量单元——M-G364PDCA
在之前的文章中,我们介绍过在汽车、桥梁检测、水利检测等方面运用的惯性测量单元,但是在相机以及更加微小的方面,对于惯性测量单元的需求也非常旺盛。对于广阔的市场需求EPSON公司推出一款小型6自由

M-G552PR1IMU(惯性测量单元)RS422接口传感器
一般说明M-G552PR1是一个小形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并使用高精度补偿技术提供高 稳定性和高精度的测量能力。M-G552PR1具有一个内置的姿态角度
发表于 04-28 14:34
•0次下载
基于FPGA的六自由度机器人视觉伺服控制方案设计
机器人视觉系统的硬件选择直接影响图像采集,图像的质量和后期的处理,并影响整个控制系统的实时性,所以应根据要求和这些硬件性能,严格选择硬件。基于伊瑟特的六自由度机器人视觉伺服控制系统主要包括摄像头、Zynq、存储、显示、通信等模块。
发表于 04-24 10:31
•584次阅读

功率放大器在重力辅助式Z自由度压电惯性双向平顺驱动研究中的应用
实验名称:功率放大器在重力辅助式Z自由度压电惯性双向平顺驱动研究中的应用研究方向:精密驱动与定位实验设备:ATA-3080功率放大器、信号发生器

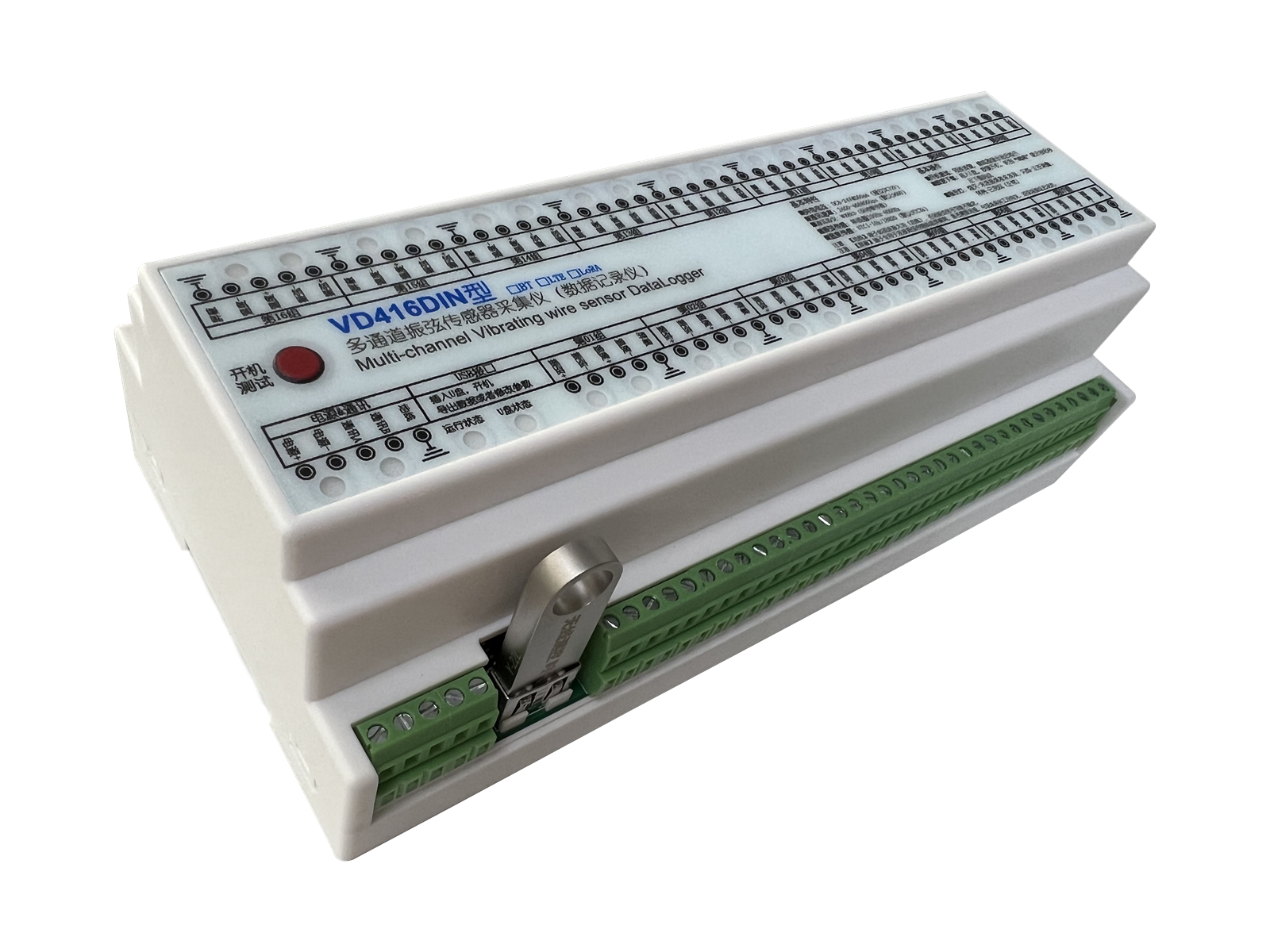
振弦采集仪在桥梁安全监测中的应用研究
梁上的振弦传感器,实时采集桥梁的振动数据。振弦传感器可以测量主梁的振动频率、振动幅度等参数,从而反映桥梁的结构稳定性和变化情况。 河北稳控科技振弦采集仪 桥梁安全监测中,振弦采集仪的应用研究主要包括以下几个方面





 工商网监
工商网监
评论