 实现自动驾驶必不可少的核心技术:线控转向
实现自动驾驶必不可少的核心技术:线控转向
提起当下大热的自动驾驶,我们总爱把注意力集中在传感器和Ai智能算法上,多数人会忽略自动驾驶必不可少的构成要素:伺服机构。上一期专栏为大家介绍了EHB和EMB制动系统的性能特点,本期接着为大家介绍实现自动驾驶必不可少的核心技术:线控转向。
如果说传统燃油车时代,发动机和变速箱是主机厂或者供应商的核心技术的话,那么到了新能源车时代,特别是智能车时代,线控转向就成了各大车企需要突破的核心技术。
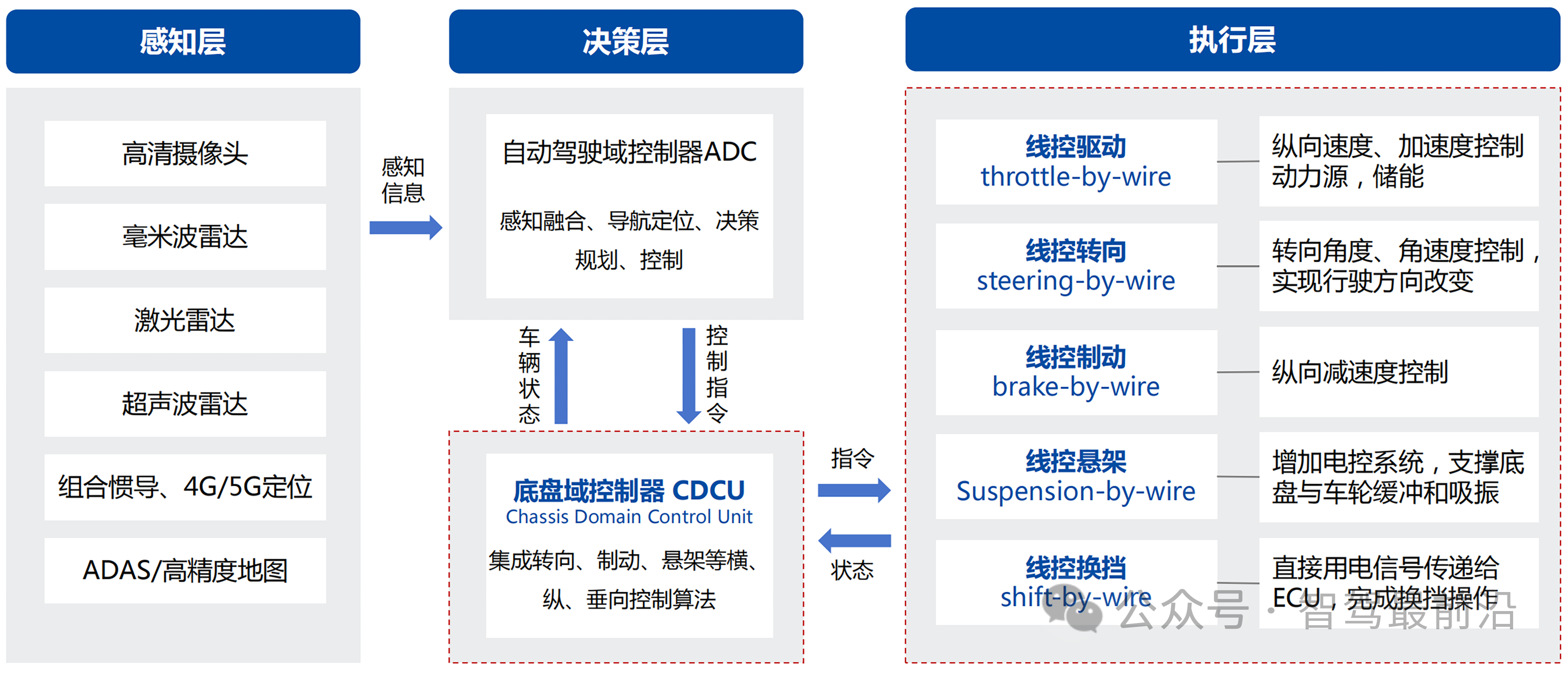
如上图,构成线控底盘的核心要素包括:线控油门、线控换挡(新能源车不需要)、线控转向、线控制动、线控悬挂。
什么是线控转向系统?
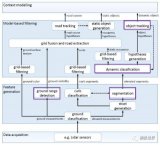
如果用一句话来概括什么是线控转向:就是把依靠转向管柱连接转向机构来实现转向的传统方式,转换成为通过传感器检测方向盘角度信号,并通过电脑控制伺服电机来实现驱动转向的转向系统。这就类似于上一期为大家介绍的BBW线控制动系统一样,同样是只给电脑输入一个电信号,然后全权由电脑来控制伺服机构的动作。
上图为SBW(steering by wire)系统的基本布局,驾驶员对方向盘的操作仅仅只是在驱动一个转角传感器,并由方向盘电机提供转动阻尼和回馈,方向盘与前轴转向机构之间没有任何刚性连接。
线控转向最关键的安全冗余设计
说到这里有人肯定为提出疑问:作为转向系统,它就像刹车系统一样,是关系到行车安全的重要装置,如果取消了转向管柱,那么一旦传感器或者伺服机构发生故障应当如何应对?
事实上,SBW线控转向系统有两种“冗余”设计方式,用于应对部件失灵造成的特殊状况:
第一种,仍然通过传统的转向管柱将方向盘与转向执行机构连接在一起,基本形态与普通燃油车无异,但在转向管柱与转向执行机构之间有电控多片离合器相连。正常情况下,多片离合器为断开状态,就是说,虽然转向管柱仍然存在,但并不起作用。只有当伺服机构发生故障的紧急情况下,离合器才会接通。
接通后,通过方向盘与转向机构(齿轮齿条机构)的刚性连接仍然能够实现转向操作,只是手感会变重一些。我们熟悉的率先在量产车上采用线控转向的英菲尼迪Q50采用的就是这样的冗余方式。
▲ 采用传统转向管柱实现冗余设计的英菲尼迪Q50线控转向系统
第二种,在执行机构处(转向机构)采用多个电机控制来实现冗余度,在方向盘处通过多个传感器布置来实现输入信号的冗余度。这种冗余方式更先进,但成本非常高,这相当于需要制造两套重复的转向机构。
但是这种设计可以完全取消掉转向管柱,从可靠性上来说甚至可以取消掉方向盘,实现L4以上的自动驾驶级别,也是自动驾驶必须要的转向系统配备。这种SBW线控转向系统完全取消了转向管柱设计,但还没有应用在任何一台量产车上。所以,在这种纯SBW量产之前,所有宣传的自动驾驶都无法达到L4以上(含L4)的级别。
▲采用传统管柱转向系统结构与纯线控转向系统结构对比
线控转向的发展现状
当然,要想实现SBW,必须要有EPS(电子助力转向系统)作为基础,目前比较成熟的SBW基本上都是从EPS基础上发展而来。所以,目前全球能够提供SBW的主要供应商之前在EPS领域也是占有相当市场分额的供应商。

▲2015-2016全球转向系统供应商份额
从上图可以看到,无论是2015年还是2016年,全球转向系统供应商的主要市场分额几乎就是由JTEKT,博世,ZF以及NSK几家瓜分。其中,JTEKT主要供应丰田为主的日系品牌。ZF主要供应德系品牌,博世和NSK则供应全球各个品牌。
▲能够提供SBW产品的供应商
从上图看,离SBW线控转向系统量产比较近的也就是博世、ZF、JTEKT三家,即便如此,目前都还拿不出量产产品。因为在SBW领域对可靠性和耐用性的要求非常高,所以各大供应商还在研发过程当中,但现阶段他们已经开始在与主机厂洽谈,大概在2020年前后可以逐步实现量产。
依靠自主研发实现自动驾驶
国内供应商任重道远
几乎国内所有造车新势力在宣传的过程中都逃不开智能汽车这个主题。但是要想实现自动驾驶,SBW是各个车企绝对绕不开的核心技术。这项技术就像燃油时代的变速箱技术一样重要。所以全球各大供应商早在数年前就投入巨资进行研发,布局了SBW相关的产品。
如果说,要想实现自动驾驶,Ai智能算法以及机器学习是软件方面的核心要素的话。那么高精度传感器和SBW操纵机构则是绕不过去的硬件门槛。
无论是传统EPS转向机构还是更高级的SBW都需要投入巨资研发,所以可以预见,未来这种关乎到汽车智能化和安全性的技术只会集中在少数几家供应商巨头手中,就像变速箱一样。
国内车企要想实现自动驾驶,或多或少的会被供应商卡住脖子,如果自主开发,则需要超长的耗时和巨大的资金投入。我曾经在主机厂工作的时候就遇到过这方面的问题。
甚至还不是SBW这么先进的系统,仅仅是一套需要支持两米车宽,2吨左右车重的EPS转向系统都只能从博世或ZF购买,由于他们与BMW之间的知识产权保护协议,如果使用还需BMW授权,所以很多先进系统很难在自主品牌特别是产销量不大的品牌上实现。可以说,国内供应商对这类核心系统的开发任重而道远。
-
核心技术
+关注
关注
4文章
625浏览量
19618 -
自动驾驶
+关注
关注
784文章
13836浏览量
166519 -
AI算法
+关注
关注
0文章
251浏览量
12265
原文标题:深度| AI算法靠边站!它是自动驾驶真正的“幕后黑手”
文章出处:【微信号:e700_org,微信公众号:汽车工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论