 卷积神经网络的数学原理介绍
卷积神经网络的数学原理介绍
【导读】在计算机神经视觉技术的发展过程中,卷积神经网络成为了其中的重要组成部分,本文对卷积神经网络的数学原理进行了介绍。文章包括四个主要内容:卷积、卷积层、池化层以及卷积神经网络中的反向传播原理。在卷积部分的介绍中,作者介绍了卷积的定义、有效卷积和相同卷积、跨步卷积、3D卷积。在卷积层部分,作者阐述了连接切割和参数共享对降低网络参数学习量的作用。在池化层部分,作者介绍了池化的含义以及掩膜的使用。
自动驾驶、智能医疗、智能零售,这些曾被认为不可能实现的事情,在计算机视觉技术的帮助下,终于在最近成为了现实。今天,自动驾驶和自动杂货店的梦想不再像以前那样遥不可及。事实上,每天我们都在使用计算机视觉技术帮助我们用人脸解锁手机,或者对即将发布到社交媒体上的照片进行自动修饰。在计算机视觉技术应用这一巨大成功的背后,卷积神经网络(CNN)可能是其中最重要的组成部分。在本文中,我们将逐步理解,神经网络是如何与CNN特有的思想协作的。本文章包含了相当复杂的数学方程式,但如果您对线性代数和微积分不熟悉,请不要气馁。我的目标不是让您记住那些公式,而是让您从直觉上去理解这些公式背后隐藏的意义。
前言
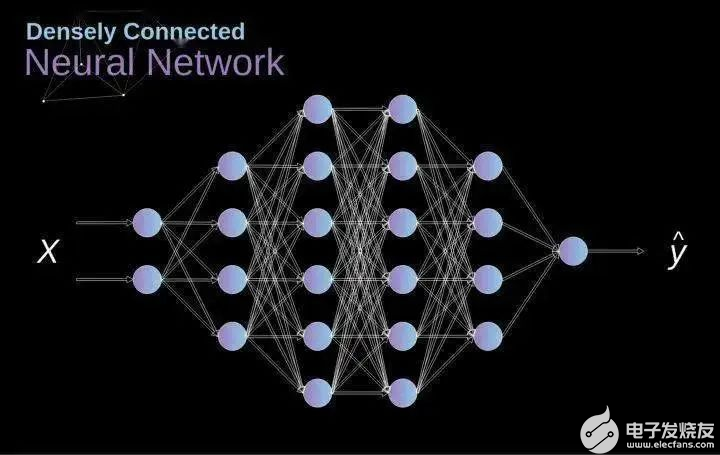
在之前的系列中,我们学习了密集连接的神经网络(densely connected neural networks)。这些网络的神经元被分成组,形成连续的层,相邻的两个层之间的神经元相互连接。下图展示了一个密集连接的神经网络的示例。
Figure 1.Densely connected neural network architecture
当我们解决分类问题时,如果我们的特征是一组有限的并有明确定义的特征,这种方法是很有效的——例如,根据足球运动员在比赛期间所记录的统计数据,预测该运动员的位置。但是,当使用照片来进行预测时,情况会变得更加复杂。我们当然可以将每个像素的亮度视为一个单独的特征,并将其作为输入传递给我们的密集网络(dense network)。不幸的是,为了使神经网络能够处理典型的智能手机照片,该网络必须包含数千万甚至数亿个神经元。我们也可以通过缩小照片的尺寸来进行处理手机照片,但是这样做会使我们丢失很多有价值的信息。可以发现,这种传统策略的性能很差,因此我们需要一种新的、更加聪明的方法来尽可能多地使用数据,并同时减少必要的计算和参数的数量。CNN闪亮登场的时候到了。
数字图像的数据结构
首先花一点时间来解释一下数字图像的存储方式。数字图像实际上是巨大的数字矩阵。矩阵中的每个数字对应于其像素的亮度。在RGB模型中,彩色图像由三个矩阵组成,分别对应三个颜色通道——红,绿,蓝。而在黑白图像中,我们只需要一个矩阵。矩阵中的每个数字的取值区间都是0到255。该范围是存储图像信息的效率(256个值刚好适合1个字节)与人眼的灵敏度(我们区分同种颜色的灰度级别的数量极限)之间的折衷。
Figure 2.Data structure behind digitalimages
卷积
核卷积(kernel convolution)不仅仅用于CNN,它还是许多其他计算机视觉算法的关键要素。核卷积就是将一个小数字矩阵(滤波器,也称作 kernel 或 filter)在图像上进行滑动,并根据 kernel 的值,对图像矩阵的值进行转换的过程。对图像经过卷积操作后得到的输出称为特征映射(feature map)。特征映射的值的计算公式如下,其中 f 代表输入图像,h 代表滤波器 。结果矩阵的行数和列数分别用 m 和 n 表示。

Figure 3.Kernel convolution example
将 kernel 放在选定的像素上后,我们从 kernel 中依次取出每个值,并将它们成对地与图像中的相应值相乘。最后,我们将每个核运算后的结果元素相加,并将求和结果放在输出特征图中的正确位置上。上图从微观角度详细地展示了这一运算的过程,但在完整图像上实施该运算的结果可能更加有趣。图4展示了使用几个不同 kernel 的卷积结果。
Figure 4.Finding edges with kernel convolution
有效卷积&相同卷积(Valid and Same Convolution)
正如我们在图3中看到的,当我们使用 3x3 的 kernel 对 6x6 图像执行卷积时,我们得到 4x4 的特征映射。这是因为在这个图像中,只有16个位置可以将 kerenl 完整地放在这张图像中。由于每次执行卷积时我们的图像都会缩小,因此在我们的图像完全消失之前,我们只能进行有限次数的卷积。另外,如果对kernel 在图像中移动的过程进行观察,我们就会发现图像外围像素的影响远小于图像中心像素的影响。这样会导致我们失去图像中包含的一些信息。下图展示了像素位置的改变对特征图的影响。
Figure 5.Impact of pixelposition
为了解决这两个问题,我们可以使用额外的边框来填充图像(padding)。例如,如果使用 1像素进行填充,我们将图像的大小增加到 8x8,因此使用 3x3 的 kernel 的卷积,其输出尺寸将为 6x6 。在实践中,我们通常用零值来填充额外的边界。根据是否使用填充,我们将处理两种类型的卷积——Valid 和 Same。Valid——使用原始图像,Same——使用原始图像并使用它周围的边框,以便使输入和输出的图像大小相同。在第二种情况下,填充宽度应满足以下等式,其中 p 是填充尺寸,f 是kernel 尺寸(通常是奇数)。

跨步卷积(Strided Convolution)
Figure 6.Example of strided convolution
在前面的例子中,我们总是每次将 kernel 移动一个像素,即步长为1。步长也可以视为卷积层的超参数之一。图6展示了使用更大步长时的卷积运算。在设计CNN架构时,如果希望感知域重叠较少,或者希望让特征图的空间维度更小,我们可以增加步长。输出矩阵的尺寸(考虑填充和步长时)可以使用以下公式计算。

过渡到第三个维度
体积卷积(Convolution over volume)是一个非常重要的概念,这不仅使我们能够处理彩色图像,而且更为重要的是,我们能够在单层网络中使用多个 kernel 。第一个规则是 kernel 和图像必须具有相同数量的通道。一般而言,图像的处理过程和图3的示例非常相似,但是这次我们是将三维空间中的值对相乘。如果想在同一个图像上使用多个 kernel,首先我们要分别对每个kernel执行卷积,然后将结果从顶层向下进行叠加,最后将它们组合成一个整体。输出张量的尺寸(可以称为3D矩阵)满足以下等式,其中:n - 图像大小,f - 滤波器大小,nc - 图像中的通道数,p - 填充大小,s - 步幅大小,nf - kernel 的数量。
Figure 7.Convolution overvolume
卷积层
接下来我们将用前面学到的知识来构建CNN的一个层。我们将要用到的方法几乎与构建密集神经网络时用到的相同,唯一有区别的地方是,我们不再使用简单的矩阵乘法,而是使用卷积。前向传播包括两个步骤。第一步是计算中间值 Z:首先将前一层的输入数据与张量 W(包含滤波器)进行卷积,然后将运算后的结果加上偏差 b 。第二步是将中间值 Z 输入到非线性激活函数中(使用g表示该激活函数)。下面展示了矩阵形式的数学公式。如果您对公式中的任何部分不太清楚,我强烈推荐您去阅读一下我之前的文章,文中详细讨论了密集连接的神经网络的具体内容。下文的插图很好地展示了公式中各张量的维数,以助于理解。

Figure 8.Tensors dimensions
连接切割和参数共享(Connections Cutting and Parameters Sharing)
在本文的开头曾提到,由于需要学习大量的参数,密集连接的神经网络在处理图像方面的能力很差,而卷积却为该问题提供了一种解决方案,下面我们一起来看看卷积是如何优化图像处理的计算的。在下图中,我们用一种略微不同的方式对2D卷积进行了可视化——用数字1-9 标记的神经元构成输入层,用于接收输入图像的像素亮度,单元 A-D 表示经过卷积计算后得到的特征映射。最后,I-IV 表示来自 kernel 的后续值,这些值是需要网络进行学习的。
Figure 9.Connections cutting and parameters sharing
现在,让我们关注卷积层的两个非常重要的属性。第一,从图中可以看到,并非两个相邻层中的所有神经元都相互连接。例如,神经元 1 仅影响 A 的值。第二,我们可以发现一些神经元使用了相同的权重。这两个属性意味着在CNN中我们需要学习的参数要少得多。值得一提的是,kernel 中的任一单值都会影响输出特征映射的每一个元素——这在反向传播的过程中是至关重要的。
卷积层的反向传播(Convolutional Layer Backpropagation)
任何曾经试图从头开始编写神经网络的人都知道,前向传播还不到最终成功的一半。当你开始向回推算时,真正的乐趣才刚刚开始。如今,我们不需要为反向传播而烦恼——因为深度学习框架已经为我们做好了,但是我觉得有必要弄明白它背后发生的事情。就像在密集连接的神经网络中一样,我们的目标是计算导数,然后在梯度下降的过程中,用这些导数去更新我们的参数值。
在下面的计算中,我们将用到链式法则——这在我之前的文章中提到过。我们想要评估参数的变化对结果特征映射的影响,以及随之对最终结果的影响。在开始详细讨论之前,我们需要将数学符号统一 ——为了表示方便,我不会使用偏导数的完整符号,而是用下面提到的缩符号。但是请记住,当我使用这种表示法时,这将始终代表着成本函数的偏导。

Figure 10.Input and output data for a single convolution layer in forward and backward propagation
我们的任务是计算 dW [1] 和 db [l] (它们是与当前层参数相关的导数),以及 dA[l-1](它将被传递给前一层)。如图10所示,dA[l] 作为输入,张量 dW 和 W,db 和 b 以及 dA 和 A 的维度分别相同。第一步是求激活函数关于输入张量的导数,将其结果记为 dZ [1] 。根据链式法则,该运算的结果将在后面用到。

现在,我们需要处理卷积自身的反向传播。为了实现这个目标,我们将利用一个称为全卷积的矩阵运算,该运算的可视化解释如下图所示。请注意,在此过程中我们要使用 kernel,而我们之前用到的 kernel 是该 kernel 旋转了180度所得到的。该操作可以用以下公式表示,其中 kernel 由 W 表示,dZ[m,n] 是一个标量,该标量属于从前一层所获得的偏导数。

Figure 11.Full convolution
池化层(Pooling Layers)
除了卷积层之外,CNNs 经常使用一个称为池化层的网络层,它们主要用于减小张量的大小并加快计算速度。这个层的结构很简单,我们只需要将图像划分成不同的区域,然后对每个部分执行一些操作即可。例如,对于最大池化层(Max Pool Layer),我们从每个区域中选择一个最大值,并将其放在输出中的相应位置即可。与卷积层的情况一样,我们有两个超参数——kernel 的尺寸和步长。最后值得一提是,如果要为多通道图像执行池化操作,则每个通道都应该分别执行池化操作。
Figure 12.Max poolingexample
池化层的反向传播(Pooling Layers Backpropagation)
在本文中,我们仅讨论最大池化的反向传播(max pooling backpropagation),但是通过将该方法稍作调整,便可运用到其他所有类型的池化层。由于在池化层这种类型的层中,我们不用更新任何参数,我们的任务只是适度地分配梯度值。前文讲到,在最大池化的前向传播中,我们从每个区域中选择最大值并将它们传输到下一层。因此很明显,在反向传播期间,梯度不会影响未在前向传播中使用的矩阵元素。在实际操作中,该过程是通过创建一个掩膜(mask)来实现的,该掩膜会记住在前向传播中所使用的元素的位置,随后我们就可以用该掩膜来传递梯度。
Figure 13.Max pooling backwardpass
-
神经网络
+关注
关注
42文章
4772浏览量
100798 -
计算机视觉
+关注
关注
8文章
1698浏览量
46004 -
自动驾驶
+关注
关注
784文章
13826浏览量
166492
原文标题:深入卷积神经网络背后的数学原理 | 技术头条
文章出处:【微信号:rgznai100,微信公众号:rgznai100】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论