 什么是陀螺仪呢?陀螺仪的基本知识
什么是陀螺仪呢?陀螺仪的基本知识
前面介绍了惯性测量单元IMU在自动驾驶和导航中的重要作用,也了解到了IMU里面重要的组成部分就是陀螺仪,那么什么是陀螺仪呢?接下来我们就从头来了解一下陀螺仪的基本知识。
陀螺仪的另一种叫法又称角速度传感器,从定义上来看陀螺仪是测量载体角运动或者角速度的传感器从应用的角度上来看,陀螺仪多用于导航、定位等系统常用实例如手机GPS定位导航、卫星三轴陀螺仪定位,其陀螺仪的精度在整个过程中起到了至关重要的作用,也就是高精度的陀螺仪直接决定了惯性导航系统的精度以及制导和自动控制系统的性能品质。
早在17世纪,在牛顿生活的年代,对于高速旋转刚体的力学问题已经有了比较深入的研究,奠定了机械框架式陀螺仪的理论基础。1852年,法国物理学家傅科为了验证地球的自转,制造了最早的傅科陀螺仪,并正式提出了 “陀螺”这个术语。但是,由于当时制造工艺水平低,陀螺仪的误差很大,无法观察、验证地球的自转。到了19世纪末20世纪初,电动机和滚珠轴承的发明,为制造高性能的陀螺仪提供了有力的物质条件。同时,航海事业的发展推动陀螺仪进入了实用阶段。在航海事业蓬勃发展的20世纪初期,德国探险家安休茨想乘潜艇到北极去探险,他于1904年制造出世界上第一个航海陀螺罗经,开辟了陀螺仪表在运动物体上指示方位的道路。与此同时,德国科学家舒勒创造了“舒勒调谐理论”,这成为陀螺罗经和导航仪器的理论基础。
中国是世界文明发达最早的国家之一,在陀螺技术方面,我国也有很多发明创造。比如在传统杂技艺术中表演的快速旋转的转碟节目,就是利用了高速旋转的刚体具有稳定性的特性。在将高速旋转的刚体支承起来的万向架的应用方面,西汉末年,就有人创造了与现在万向支架原理完全相同的“卧褥香炉”。这种香炉能“环转四周而炉体常平,可置被褥中”。实际上是把这种香炉放在一个镂空的球内,用两个圆环架起来,利用互相垂直的转轴和香炉本身的质量,在球体做任意滚动时,香炉始终保持平稳,而不会倾洒。
随着航空事业的发展,到了20世纪30年代,航空气动陀螺地平仪、方向仪和转弯仪等已经被制造出来了。在第二次世界大战末期,陀螺仪作为敏感元件被用于导弹的制导系统中。特别是20世纪60年代以来,随着科学技术的发展,为了满足现代航空、航海特别是宇宙航行的新要求,相继出现了各种新型陀螺仪。目前,陀螺仪正朝着超高精度、长寿命、小体积和低成本等方向发展。
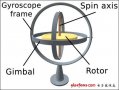
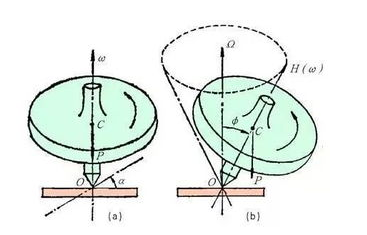
那么,究竟什么是陀螺仪呢?传统的陀螺仪定义是:对称平衡的高速旋转刚体(指外力作用下没有形变的物体),用专门的悬挂装置支承起来,使旋转的刚体能绕着与自转轴不相重合(或不相平行)的另一条(或两条)轴转动的专门装置。其中,陀螺仪的对称轴亦即自转轴,称为陀螺主轴。研究这类陀螺运动特性的理论就是动力学中刚体绕定点运动的动力学理论。
传统陀螺仪的定义包括了一大类陀螺仪,称为机械转子式陀螺仪,如框架式陀螺仪、液浮陀螺仪、挠性陀螺仪、静电陀螺仪等,都是依靠转子的高速旋转来实现角速度信息的测量。
随着相关技术的发展,多种新原理的陀螺被研制出来,它们具有崭新的特性,使陀螺仪家族的阵营在不断扩大。我们把能自主地测量物体角速度或角位移的器件也称为陀螺仪,包括光学陀螺仪、振动陀螺仪、硅微机械陀螺仪等。
自Sperry发明了全球第一个实用的陀螺仪至今,陀螺技术已经经历了近百年的发展。下图为陀螺技术百年发展史的简单回顾。
回顾陀螺技术100年的发展,它们大致可分为以下三个阶段:
阶段Ⅰ:机械转子式陀螺阶段
始于20世纪40年代,当时代表性的应用是在第二次世界大战末期德国研制的V-2导弹上。不管哪种机械转子式陀螺,其基本工作原理都是依据牛顿第二定律(F=ma)。传统的机械转子式陀螺的发展过程,可以说是与框架支承干扰力矩作斗争的过程。此后很长一段时间,提高陀螺性能的主要难题是如何克服作用在陀螺框架轴上的各种外干扰力矩,从而保持其旋转轴在空间的精确指向。根据这一思路,人们先后研制成功了液浮陀螺、静压气浮陀螺、动压气浮陀螺、三浮陀螺以及静电陀螺等。如下图所示,列出了各类机械转子式陀螺仪的外观照片。
阶段Ⅱ:光学陀螺阶段
20世纪60年代末70年代初,微型计算机技术开始被引入惯性导航系统,出现了把陀螺仪直接固联在运动载体上的捷联式惯性导航系统。捷联式惯性导航系统采用数学平台来代替原来的物理平台,早期捷联式惯性导航系统采用的陀螺仪的典型代表是动力调谐陀螺仪。
光学陀螺作为崭新原理的全固态陀螺,它是根据爱因斯坦相对论原理(E=mc2)研制成功的。20世纪70年代中期,环形激光陀螺仪问世,这是陀螺历史上最大的技术进步;20世纪80年代中期,干涉型光纤陀螺仪研制成功。激光陀螺和光纤陀螺的研制成功,开拓了光学陀螺导航新时代的到来。光学陀螺这一称谓是从机械转子式陀螺延续下来的,它实际上是一种角速率传感器。光学陀螺作为一种性能非常优良的惯性传感器,它的地位提升应归功于捷联式惯性导航系统的出现,反之,也正是由于它的研制成功,才使捷联式惯性导航系统走向实用。
目前,光学陀螺主要包括环形激光陀螺和干涉型光纤陀螺两大类(见下图),它们是捷联惯性导航系统的理想元件,已被应用到几乎各种类型的惯性导航系统中。
阶段Ⅲ:微机械陀螺阶段
20世纪80年代初,在微米/纳米(micro/nanotechnology,分别为10^-6/10^-9米量级)技术这一引人注目的前沿技术背景下,微机电系统(Micro ElectroMechanical systems,简称MEMS)引起了人们广泛的关注。微机电系统是指对微米/纳米材料进行设计、加工、制造、测量和控制的技术。它可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。这种微机电系统不仅能够采集、处理与发送信息或指令,还能够按照所获取的信息自主地或根据外部的指令采取行动。它用微电子技术和微加工技术(包括硅体微加工、硅表面微加工、LIGA和晶片键合等技术)相结合的制造工艺,制造出各种性能优异、价格低廉、微型化的传感器、执行器、驱动器和微系统。微机电(MEMS)是近年来发展起来的一种新型多学科交叉的技术,该技术将对未来人类生活产生革命性的影响。它涉及机械、电子、化学、物理、光学、生物、材料等多学科。
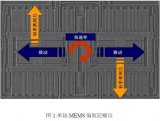
在此基础上,80年代中期,出现了微机械陀螺,即MEMS陀螺,也称为硅微陀螺,它是采用微米/纳米技术,在不足1毫米见方的硅芯片上,采用类似半导体加工技术的微电子工艺进行加工而成的。它的制作是通过采用半导体生产中成熟的沉积、蚀刻和掺杂等工艺,将机械装置和电子线路集成在微小的硅芯片上完成的,最终形成的是一种集成电路芯片大小的微型陀螺仪。经过多年的努力,1989年采用MEMS技术的第一个微机械陀螺问世,漂移率达10度/小时。它的出现是MEMS技术中具有代表性的一项重大成果,更带来了惯性技术领域的一次新变革。由于采用了成熟的半导体加工技术,这种陀螺从概念提出到批量投产,仅用了五六年时间。
微机械陀螺(MEMS陀螺),它与其他振动陀螺一样,都是基于哥氏效应原理工作的。所有的微机械陀螺都是非旋转装置,通过获取一个振动机械元件上的哥氏加速度效应,实现角速率检测。即一个验证质量在一个平面内做正弦振动,如果此平面以角速率Ω旋转,那么哥氏力就会使该质量以垂直于该平面的方向做正弦振动,其幅值正比于Ω。对哥氏力所引起的运动进行测量,就可获得Ω的信号,这就是微机械陀螺的基本工作原理。
低成本微机械陀螺的研制成功,使得惯性导航系统的应用领域大为扩展,许多以前不能实现的应用变为现实,在军用方面尤其加速了战术武器制导化的进程。目前在车载导航中应用最广的就是MEMS陀螺仪。
-
传感器
+关注
关注
2548文章
50663浏览量
751884 -
陀螺仪
+关注
关注
44文章
777浏览量
98568 -
导航系统
+关注
关注
2文章
256浏览量
30672
原文标题:自动驾驶基础(六十三) - -惯性测量单元(IMU)九
文章出处:【微信号:Analog_World,微信公众号:模拟世界】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
详解三轴陀螺仪的技术原理

三轴陀螺仪是什么_三轴陀螺仪在手机上的应用
三轴陀螺仪有什么用_三轴陀螺仪的作用

MEMS陀螺仪技术原理_三轴陀螺仪技术原理

浅谈MEMS陀螺仪技术 MEMS是否取代光纤陀螺仪技术
光纤陀螺仪与旋转式陀螺仪的工作原理解析
陀螺仪传感器的分类_陀螺仪传感器有什么用
什么是MEMS陀螺仪?
怎么解决陀螺仪角度漂移问题 三轴陀螺仪和六轴陀螺仪的区别
陀螺仪是什么?陀螺仪工作原理





 工商网监
工商网监
评论