 汽车正快速进入全新的ADAS世界
汽车正快速进入全新的ADAS世界
近几年,高级驾驶辅助系统(Advanced Driver Assistance Systems,简称“ADAS”)技术的研究和应用在各相关领域迅速开展进行,可以说汽车正快速进入全新的ADAS 世界。ADAS 的应用场景要求其相关功能必须经过足够可靠的测试,以保证自动驾驶车辆能够无风险地安全运行。因而针对ADAS系统的测试成为目前备受关注的问题。
自动驾驶(Autonomous Driving , AD)技术给汽车行业中ECU 的开发带来了巨大的挑战。汽车研发中越来越多地涉及AD技术,整个车载电子系统的复杂度也随之大幅提升。一是硬件的复杂度:现在汽车中会大量使用到摄像头、毫米波雷达、激光雷达这些高性能传感器,为了在各种复杂的外界条件下尽可能准确地检测车辆环境,相关传感器的数量总是越多越好。二是软件的复杂度:传感器提供的数据需要通过AD ECU内的高性能处理器以及图形处理器进行数据融合并实时处理。AD ECU 通常使用QNX、PikeOS 或者 INTEGRITY OS这些遵从POSIX规范的操作系统,这些操作系统可以搭载原先在汽车ECU 开发领域从未使用过的IT 行业软件环境。例如在开发自动驾驶功能时就可以使用TensorFlow、ROS(Robot Operating System)这些用于人工智能分析和机器学习的架构环境。
自动驾驶系统中ECU 复杂的软硬件环境最终都会映射到系统发布流程中测试环节的工作,即使只是软件本身及其相关的自动驾驶功能,需要的也远远不只是简单的测试和验证程序。
自动驾驶功能的验证方法
据估计,自动驾驶功能的验证需要在实际道路上进行数百万甚至十亿公里的驾驶测试,如果再考虑到对道路上行人可能造成的危险以及测试的可复现性,这种使用实车进行的真实路试工作量庞大、效率较慢,因此当前更倾向于在实验室虚拟环境中进行高效率的自动驾驶功能测试。需要指出的是,在实验室中使用的仿真模型只能提供真实物理环境的一些近似值,自动驾驶功能的验证必须是充分结合虚拟平台测试以及真实世界的路试。
ADAS 系统中ECU 的核心是控制算法或者说是软件部分,因此有的ADAS系统仿真测试会采取仅针对软件逻辑的虚拟测试,即所谓的软件在环(Software-in-the-Loop, SiL)测试。SiL 的测试环境一方面需要能够脱离ECU硬件独立运行其软件 ,另一方面需要模拟软件的测试环境,包括目标车辆、车辆行为、车辆运行的外部环境以及相关的传感器执行器等。此外还需要覆盖一些像 “自动化执行” 这样额外的测试需求。整体测试工作可以细分为多个单独的子任务,针对单个子任务当前都有专业的工具能够覆盖实现,在测试过程中可以使用标准化的接口将各个专业工具结合起来搭建一个完整的测试环境,用户甚至无需了解工具之间通信的技术细节。
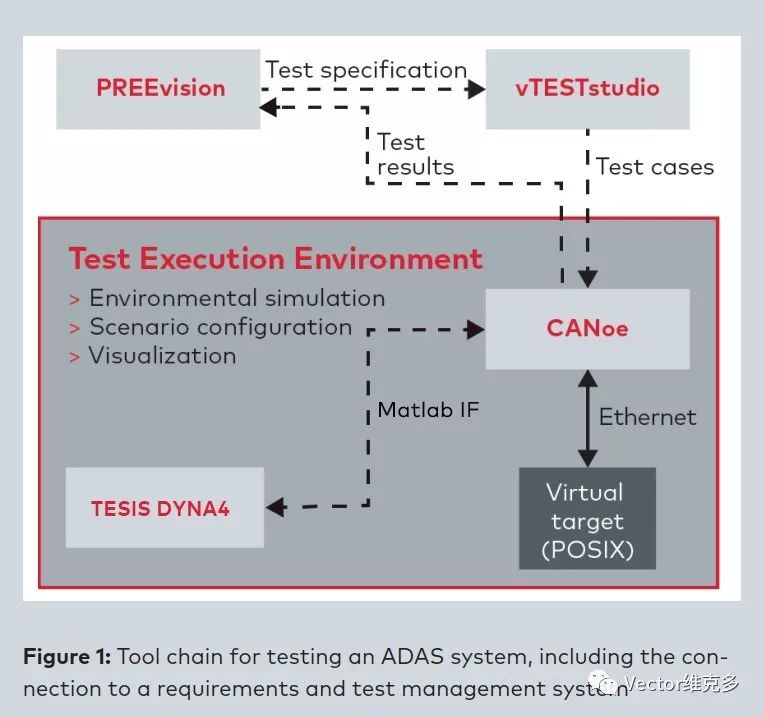
图一展示了基于Vector 工具链的ADAS 测试方案的典型配置,其中待测系统(System Under Test,SUT)由虚拟环境仿真实现。PREEvision支持需求管理和测试数据管理,在工具链中负责管理测试规范和测试结果;vTESTstudio 是自动化测试脚本集成开发环境,用于开发测试用例,生成可执行测试单元;CANoe支持总线分析、仿真以及测试,在系统中作为测试执行平台,集成各工具交互数据,控制测试运行;DYNA4 是专业的虚拟道路测试和仿真解决方案工具,在工具链中负责自动驾驶环境的模拟。测试可以手动控制或自动执行,一旦测试执行完成,测试工具链将会自动创建测试报告并且将测试结果储存在测试数据管理系统中。该方案确保了从测试需求到测试结果的端对端的可追溯性。
以紧急制动功能测试为例来说明SiL测试系统的搭建和设置。如图2所示,SUT 是一个基于Linux系统的AUTOSAR Adaptive ECU,它需要通过SOME/IP 与传感器和执行器进行通信。测试系统包含一个传感器网关和一个执行器网关:传感器网关从速度传感器和距离传感器接收数据并通过SOME/IP 与紧急制动ECU 通信;ECU发出的控制信号则通过执行器网关传递给制动和加速踏板。在整个测试系统中,使用DYNA4模拟行车环境和传感器、执行器,CANoe 仿真节点模拟传感器网关和执行器网关实现与SUT 的通信以及相关测试。

车道偏离警告HiL 测试系统
除了基于全仿真的SiL测试,ECU 软件后续还需要与传感器以及真实硬件进行集成测试。此时可采用半实物仿真的硬件在环(Hardware-in-the-Loop, HiL)测试方案。HiL测试需要在模拟的车辆环境中集成真实的ECU 以及真实的传感器。ADAS 系统要求ECU 与传感器之间能够实时进行数据交互,这就需要搭建一个高性能的实时仿真系统,比如可以通过Vector 的VT System、VN系列总线接口卡来建立ECU、传感器和测试上位机之间的电气连接。
下面以车道偏离警告功能测试系统为例介绍利用Vector 工具搭建的高效、可扩展的HiL 测试系统,当然该HiL 系统架构同样适用于测试其他ADAS ECU。车道偏离警告(Lane Departure Warning, LDW)系统旨在当车辆从当前车道异常偏移时以视觉、听觉或振动等方式警告驾驶员,主要由LDW ECU 和摄像头组成,一般安置在车身侧面或后视镜位置。

测试系统中主要包含CANoe、DYNA4、LDW ECU、力反馈方向盘(Force Feedback Wheel)和总线接口卡五个主要组件,各个组件之间协同沟通实现测试功能。
CANoe 作为测试的执行平台,提供测试的模拟环境,控制整个测试的运行。
DYNA4 软件实现自动驾驶环境的模拟,负责搭建虚拟化行车环境,包括车辆模型、驾驶员模型、交通环境模型以及传感器模型等,模型的各个参数可以通过软件进一步细化设置。在测试过程中,显示器同步显示具体的动画细节,比如各种景观细节或其他道路用户等周围道路环境。
LDW ECU(包含摄像头传感器)被放置在DYNA4 显示器的前方,使其像在真实车辆中一样拍摄DYNA4中模拟的动画场景。LDW ECU 软件接收并处理图像数据,在车辆偏离车道时通过CAN总线发出警告。
力反馈方向盘接收控制信息,用于以振动反馈的形式显示警告信息。
总线接口卡实现软件运行平台PC 端与LDW ECU 、力反馈方向盘的物理连接。示例中使用VN1610搭建CAN 总线通信网络,保证ECU 控制信号的实时传输。Vector 可提供多种总线接口卡支持不同总线类型的通信,以及高性能模块化IO板卡实现IO信号的同步处理。对于高实时性要求的测试,可以通过支持Extended Real Time (ERT)技术的VN8900/VT6000实时处理模块或CANoe专用工控机来解决时间关键任务,进行高性能仿真测试。
整个测试工作通过简单的软件配置就可实现:DYNA4负责测试系统中车辆及环境模型的搭建;随后模型被编译为DLL 文件无缝导入到CANoe中作为CANoe 一个仿真节点;CANoe模拟残余总线与ECU通信交互数据并控制测试的执行;测试脚本则可使用vTESTstudio编写。测试过程可以设置为手动/半自动控制,也可以设置为自动执行。详细的测试步骤和数据流在CANoe中实时监控,并最终自动生成格式可自定义的测试报告。

展望
Vector结合其开发、管理、仿真及测试工具链的优势,提供具有高成本效益的ADAS系统测试解决方案。方案以功能强大的CANoe 和专业车辆仿真软件DYNA4为基础:CANoe支持多种总线通信和残余总线的仿真,丰富的测试API 接口能够快速地实现自动化测试;DYNA4软件带有丰富的辅助驾驶模型库,用户可以使用现成组件进行高效快速设置,无需复杂的自定义操作。
此外,ADAS/AD 功能可以分布在多个ECU 上实现。从测试工程师角度上来说,软件功能相比于作为封闭黑匣子的ECU显得更为重要。面向服务的架构(Service-Oriented Architecture,SOA)为各个功能组件提供通信基础,使得这些组件可以独立于硬件或操作系统进行通信。ADAS系统未来将给测试工具提出更多的挑战。
-
adas
+关注
关注
309文章
2205浏览量
209067 -
机器学习
+关注
关注
66文章
8459浏览量
133370 -
自动驾驶
+关注
关注
787文章
13992浏览量
167632
原文标题:ADAS系统测试解决方案
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
乾瞻科技发布全新汽车IP解决方案
JAE汽车ADAS连接器产品介绍

使用FPGA构建ADAS系统简易过程
康谋分享 | AD/ADAS的性能概览:在AD/ADAS的开发与验证中“大海捞针”!

基于Arm平台的ADAS引领汽车安全未来
康谋分享 | 直面AD/ADAS快速开发挑战:IVEX自动驾驶场景管理及分析平台!


LM5143-Q1 4相降压调节器设计,适合汽车ADAS应用

聚焦MIPI 系列之三:汽车SerDes – 实现更好的ADAS摄像头传感器

优化汽车无钥匙进入系统,利用蓝牙低功耗和LIN技术如何快速实现?






 工商网监
工商网监
评论