 中科院自动化所王飞跃教授作大会报告
中科院自动化所王飞跃教授作大会报告
在第十八届上海国际车展期间,同期举行了 “2019 AI+智能汽车创新峰会”,中科院自动化所王飞跃教授作大会报告,他认为未来交通需要将有人车、遥控车、网联车、无人车通过平行驾驶理论统一成“平行汽车”,平行汽车将实现车辆的运营、监控及应急管理三结合,实现安全高效的未来出行。
汽车与马车的“战争”
1820年,蒸汽汽车在英国达到了实用化的阶段,首先是作为公共汽车,然后是私人汽车。蒸汽汽车行驶时像传说中的火龙,喷吐着烟火粉尘,发出很大的噪音,行人和马倍受惊扰,赶马车的人更为反感。为解决这一矛盾,英国从1858年开始实行最早的道路交通法规——“红旗法”,规定蒸汽车在郊外和市内都要限速,而且在蒸汽汽车前方几米远的地方要有一手持红旗的人先行。
汽车与马车的战争大约持续了接近一个世纪,最终凭借着新生事物强大的生命力,再加上几代人坚持不懈的努力改进,汽车终于代替马车,成为人类在陆地上的主要交通工具。
随着人工智能技术的进步,无人驾驶汽车正逐渐从封闭测试场走向公共道路。有人驾驶的汽车与无人驾驶汽车在道路上混合行驶时,是否也将出现相似的矛盾?
在上海国家会展中心举行的 “2019AI+智能汽车创新峰会”上,中科院自动化所王飞跃教授作了题为《平行汽车到平行驾驶:从“功能汽车”到“智能汽车”》报告,他认为有人车和无人车同时上路是未来交通发展的过渡阶段,就像马车和汽车混合行驶一样,至少要持续十几年。未来以更加智能、高效、节能为核心理念设计的无人车,将会彻底把人从驾驶员位置上取代掉。
平行车:将有人车、遥控车、网联车、无人车统一起来
目前,无人驾驶汽车上路存在诸多难题,不过这在王飞跃教授眼中都是暂时的“马粪问题”,新技术的产生将让这些难题自动消失。“我个人认为从环保、资金投入等角度看,目前大力推广无人驾驶汽车太过着急,可以率先应用于一些特殊的场合,逐渐从矿山、物流(包括码头)、市政落地,慢慢发展到出租车、完全无人驾驶汽车。”王教授的言外之意是当下应该从特殊场景入手,结合技术的延续性,思考未来交通的顶层架构。当道路基础设施、通信技术、车载硬件技术以及算法发展完善后,再推动完全无人化,会少走很多弯路。所以“2050年落地也不迟。”
未来的无人驾驶汽车将用何种人工智能来引导?王飞跃教授借用AlphaGo 战胜人类职业围棋高手的事例解释了未来人工智能的三个范式:
(1)平行:真实世界与虚拟世界的互动
(2)从牛顿到莫顿:从“小规律、大定律”到“大数据、小定律”
(3)小数据导成大数据提炼成小智能
当这种人工智能放到无人驾驶上就形成了虚实互动的平行驾驶。所谓的平行驾驶就是通过人工系统对实际无人车和路建模,构建软件定义车辆及车路系统,软件定义的汽车(人工汽车)和物理汽车一起开,而且一部物理汽车要对应三部软件汽车:一部用来做描述,与物理车通过无线传感网联在一起,描述车辆的即时状态,不论开到哪里都受监护;一部用来做预测,前方道路是否发生事故,是否拥堵,预测车辆都能提前预测;还有一部用来做规划和引导,给你提方案,怎样路线最好,最省油,最节约时间。物理汽车和虚拟汽车同步行驶,保证在物理世界安全,在精神世界安全,在智能世界安全,实现300%的安全。
同时建立控制计算中心,对无人车和道路采集的真实数据及人工系统的虚拟数据进行联合优化,保证无人驾驶更高级别的安全性,对单车进行相应的改造,从而降低车辆成本。平行驾驶充分利用了全球数字化及信息化资源,将云端、道路及车辆上的资源无缝衔接,充分考虑安全性、舒适性、敏捷性和智能性等指标,将物理、社会、信息空间打通,从而有效保证车辆行驶安全与最优行车体验,最终实现可靠、舒适、快速的平行驾驶。
王飞跃教授提到“从有人车、遥控车、到网联车、再到无人车,这四类车可通过平行驾驶完成统一,形成第五种车叫做平行车。平行车未来的目标是将物理世界的 UDC(不定性(Uncertainty),多样性(Diversity)和复杂性(Complexity))转化为知识世界的 AFC(具有深度知识支持的灵捷(Agility)、通过实验解析的聚焦(Focus)、能够反馈互动自适应的收敛(Convergence))。用现实世界的术语来讲,即实现运营、监控及应急管理三结合。其中,运营要实现两个“E”-Effective、Efficient。”
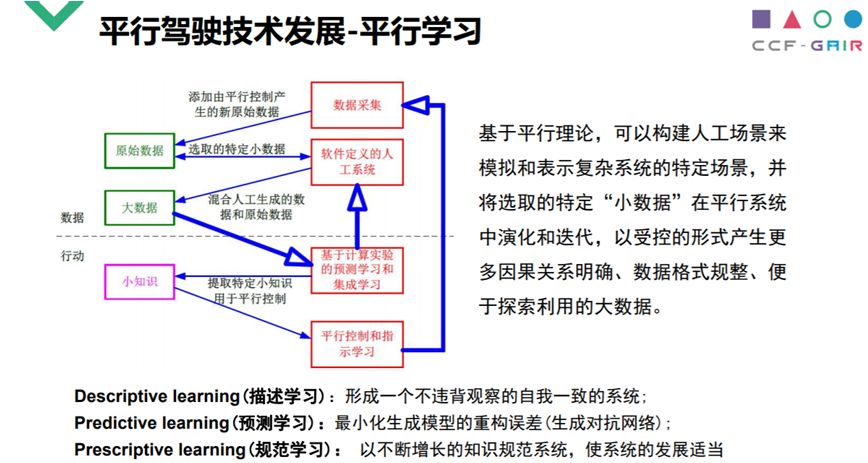
在平行理论的框架下,感知、规划、网络、转向控制、测试都需要平行。无人车通过计算实验的方式把小数据导成大数据,大数据导成小智能,核心就是平行学习。基于平行理论,可以构建人工场景来模拟和表示复杂系统的特定场景,并将选取的特定“小数据”在平行系统中演化和迭代,以受控的形式产生更多因果关系明确、数据格式规整、便于探索利用的大数据,这就是平行视觉。
同时,虚实互动的车辆智能评估与扩展方法平行测试,可以用来测试和验证无人车对复杂交通场景的理解和行驶决策的能力, 使无人驾驶车辆进一步提高适应复杂环境的能力。平行测试的文章于近期发表在国际知名《科学》杂志的子刊《科学·机器人学》(Science Robotics)中。
人在回路的平行测试模型架构
平行驾驶技术发展
谈到平行驾驶技术近年来的发展,就必须要提到一家中科院系的慧拓智能机器有限公司,该公司以ACP平行理论为基础,致力于新一代云端化智能网联自动驾驶技术的研发及产业化。去年3月18日,慧拓在中国智能车综合技术研发与测试中心(常熟)发布其 “第三代平行驾驶系统”,公开演示了“驾驶员”如何利用平行驾驶管控中心的遥控驾驶系统中远程管理并控制在真实道路上行使的多辆无人驾驶车。去年6月30日,在IEEE IV 2018 On-Road Demonstration 国际智能车联合道路演示上,展示了平行驾驶3.1版,现场演示了一般交通场景响应式接管、紧急交通场景主动接管、主动避障、中心驾驶员实时状态检测四个部分。围绕“平行驾驶”框架的平行驾驶3.1系统,通过平行驾驶管控平台流畅的管理多台无人车,让无人车更安全平稳的在道路上行驶,这无疑是自动驾驶技术的落地提供了一种安全、可靠、高效的实施方案,实现道路上混合车辆系统(有人驾驶、自动驾驶、无人驾驶)的安全平稳智能管理,同期也成立了一个国际平行驾驶联盟(iPDA),由18所学校参加进来共享数据。
另外,慧拓与吉利合作的平行驾驶,与徐工合作的平行矿山,与一汽合作的平行物流等项目都在进行中。王教授最后提到,“目前平行驾驶中虚拟测试已经占到了99%,但是仍然是不够的,最终要将物理车测试降到万分之一甚至更小。把过去在物理世界吃一"堑",虚拟世界长一"智",变成在虚拟世界吃多"堑",物理世界长多"智"。”
-
AI
+关注
关注
87文章
30897浏览量
269117 -
智能汽车
+关注
关注
30文章
2852浏览量
107280
原文标题:平行汽车到平行驾驶:从“功能汽车”到“智能汽车”
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
罗克韦尔自动化亮相2024中国国际矿业大会
华大九天亮相第61届设计自动化大会
开启全新AI时代 智能嵌入式系统快速发展——“第六届国产嵌入式操作系统技术与产业发展论坛”圆满结束
机械自动化和电气自动化区别是什么
机械自动化是自动化的一种吗
机械制造与自动化是自动化类吗
工业自动化和自动化区别是什么
浅谈对化工厂内35kV及以下变电所的综合自动化
罗克韦尔自动化亚太区PartnerNetwork合作伙伴大会圆满落幕
自动化智能运维系统在高铁牵引变电所的研究与应用
浙江图灵算力研究院向知存科技颁发“年度最具影响力企业奖”
湖南大学校长、王耀南院士一行赴中科亿海微调研指导






 工商网监
工商网监
评论