 PI-PD 控制器的四旋翼飞行器PCB设计和原理图
PI-PD 控制器的四旋翼飞行器PCB设计和原理图

四旋翼姿态控制通常选用 PID控制器作为主控环节,但 PID 控制器的参数不易整定,调控结果也存在较大的系统超调量,难以获得满意的控制效果。因此设计了 PI-PD 控制器的四旋翼姿态控制方式,其中 PI 控制器能够使系统快速无稳态误差的收敛,PD 控制器可以有效的抑制系统超调量。仿真结果表明:PI-PD 控制器能够很好的抑制系统超调量,缩短系统收敛时间,具有良好的控制效果。
近年来,随着微型系统、微型传感器、惯导技术以及飞行控制等技术的发展,四旋翼飞行器(以下简称四旋翼)引起了人们的广泛关注。四旋翼是通过改变四个旋翼的转速来调整其在空中的飞行姿态,包括俯仰角 θ、横滚角 φ、偏航角 ψ,从而控制机体水平方向上的运动,因此四旋翼的姿态控制是决定其飞行性能的关键所在。在工业过程控制和航空航天控制等领域中,PID 控制的应用达到 80 % 以上,不过由于四旋翼系统的强非线性、惯性和延迟,PID 控制器对四旋翼姿态的调整效果往往出现较多的系统超调量,或者调整时间较长,控制
效果并不令人满意。因此,设计一种能够抑制系统超调量,并且保证系统快速收敛的控制器,
可以提高四旋翼系统的稳定性和控制性。
1 PID控制器基本原理
PID 控制器结构简单、方便调试,广泛应用于工业生产中。PID 控制器是根据系统输出的误差值调节系统输出的控制形式,包含比例控制(P)、积分控制(I)和微分控制(D),其连续 PID 控制的结构形式为:
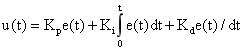
(1)
其中 u(t) 为系统输出,Kp、Ki、Kd 分别为比例、积分和微分系数,e(t)=y(r)-y(t) 为期望值与输出量的差值,即输出误差。而对于数字控制系统,可将 PID 控制器离散化,得到离散 PID 的结构形式:
 (2)
(2)
其中 , 为所有误差值累加之和,Δe(t)=e(t)-e(t-1),等效微分运算。当期望值在相邻的采样周期保持不变时,y(r)=y(r-1),Δe(t)=-y(t)+y(t-1),Δe(t) 即为系统输出的变化量。
, 为所有误差值累加之和,Δe(t)=e(t)-e(t-1),等效微分运算。当期望值在相邻的采样周期保持不变时,y(r)=y(r-1),Δe(t)=-y(t)+y(t-1),Δe(t) 即为系统输出的变化量。
若基于 PID 控制器来对四旋翼的姿态进行调控,参数整定难度较大,调控效果不佳。鉴于此,本文基于文章 [6] 提出的 PI-PD 控制器,设计了基于 PI-PD 控制器的四旋翼姿态控制方式,用于减小系统超调量,缩短系统收敛时间,提高四旋翼在空中飞行的稳定性和控制性。
2 PI-PD控制器
PID 控制器对于高阶时滞系统、复杂的模糊系统以及不确定系统而言,控制效果不佳。而在 PID 控制器基础上演变而来的 PI-PD 控制器,对于含有积分、振荡或不稳定环节的控制对象,可以实现较好的闭环控制。PI-PD 控制器其结构图如图 1 所示。
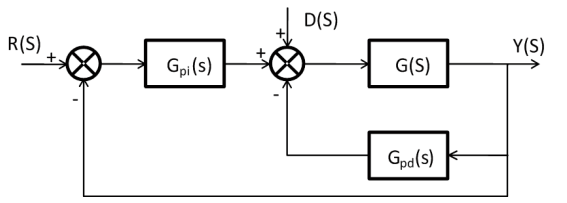
图 2:PI-PD 控制器等效结构图
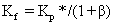
设 PI 控制器和 PD 控制器的传递函数为:
 (3)
(3)
 (4)
(4)
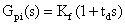
其中 Kp、Ti 分别 PI 控制器的比例和积分系数,Kf、Td 分别为 PD 控制器的比例和微分系数。图中,PI 控制器仍处于主控环节上,根据期望值调节输出量,具有决定系统收敛快慢和消除稳态误差的作用。而 PD 控制器成为了反馈环节,具有抑制系统振荡和超调量的作用,并且只与系统输出变化量有关,与期望值无关。

图 2:PI-PD 控制器等效结构图
为了简化 PI-PD 控制器结构,将其进行结构变换,得到图 2 所示的等效结构图。可得到主控环节 PI+PD 控制器为:
 (5)
(5)
设 PID 控制器传递函数为:
 (6)
(6)
其中 Kp*、Ti*、Td* 分别为 PID 控制器的参数。于是可将式(5)整理成式(6)的类似形式:

(7)
设 Kp=βKf,参数 β 表示 Kp 与 Kf 的关系,式(7)可变换为:

(8)
比较式(6)与式(8),可得出 Kp*、Ti*、Td* 与 Kp、Ti、Kf、Td 之间的关系表达式:
 (9)
(9)
 (10)
(10)
 (11)
(11)
 (12)
(12)
根据式(9)和(11)可得:
 (13)
(13)
根据式(10)和(12)可得:
 (14)
(14)
由此可以看出,根据 PID 控制器的 Kp*参数以及 β 值可以计算出 PI-PD 控制器的 Kp和 Kf 参数,β 决定了 Kp 与 Kf 的分配比例。式(13)和(14)表明,PI-PD 控制器的积分
控制和微分控制与 PID 控制器的参数相同。因此 PI-PD 控制器可以根据 PID 控制参数和 β 值计算得出 Kp、Ti、Kf、Td 参数,通过参数再次整定,能使系统在超调量较小、收敛时间较短的情况下平稳收敛,具有良好的调控效果。
3 仿真分析
通过 Adams 软件建立四旋翼动力学虚拟样机,将 Adams 所建模型与 Matlab/Simulink进行联合仿真,研究控制器对四旋翼姿态控制的调节效果。本文研究的四旋翼参数为:机体质量 m=0.67kg,对称电机轴距 l=450mm,旋翼转速与升力关系 8000r/m=9.8N,角度初始值俯仰角 θ=0°、俯仰角期望值 y(r)=0°,仿真步长 t=0.01s。横滚角 φ 与偏航角 ψ 的仿真结
果类同,本文不再赘述。
(1)使用 PID 控制器调节俯仰角 θ 的角度,整定一组参数 Kp=18、Ki=0.2、Kd=260。而根据 PID 控制器参数,设定不同的 β 值,计算出 PI-PD 控制器的 Kp、Ti、Kf、Td 的参数,仿真结果如图 3 所示。
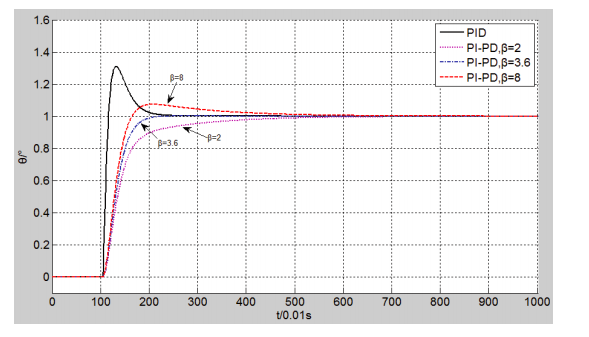
图 3:PI-PD 控制器不同 β 值仿真结果
在 1s 的时刻,期望值 y(r) 从 0°变为 1°,俯仰角 θ 在 PID 控制器的调节下,收敛时间约为 1.8s,系统超调量约为 30%。
与 PID 控制器的仿真结果比较,当 β 不同时,PI-PD 控制器具有不同的调节效果。而当 β=3.6 时,系统超调量极小,且收敛时间与PID 控制器基本相同。由此可以证明,选取合适的 β 值,PI-PD 控制器可以有效的抑制系统超调量,提高了系统的稳定性。
(2)为 了 使 系 统 收 敛 时 间 更 短, 根据 PI-PD 控制器的调节特性,重新整定参数Kp、Ki、Kd 和 β,仿真结果如图 4 所示。
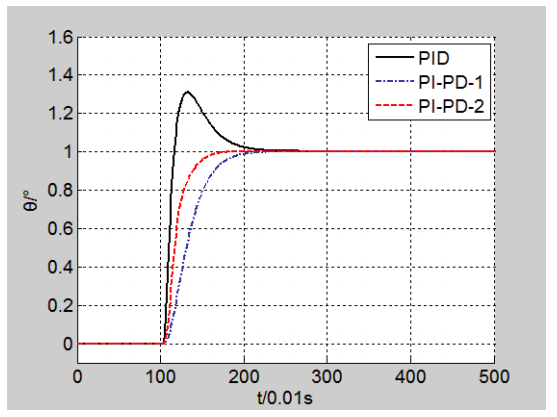
图 4:PI-PD 控制器不同整定参数仿真结果
仿真结果表明:PID 与 PI-PD-1 的收敛时间约为 1.8s,而 PI-PD-2 的收敛时间约为 0.8s,明显快于前两种控制效果。由此证明 PI-PD 控制器对于不同的整定参数,可以在系统无超调量的情况下,缩短系统收敛时间,提高了系统的控制性。
4 结束语
由于四旋翼的非线性和时滞特性,基于PID 控制器的四旋翼姿态控制方式的调节效果较难满足人们需求。本文基于 PI-PD 控制器,设计了新的四旋翼姿态控制方式。PI-PD 控制器方式可以利用已经整定好的 PID 控制器的参数,根据 β 值计算出控制参数。仿真结果表明
PI-PD 控制器能够使系统稳定收敛,且很好的抑制了系统超调量,获得了良好的控制效果。
在今后的工作中,将继续研究 PI-PD 控制器的参数整定、响应时间、鲁棒性等问题,获得更好的四旋翼姿态控制效果。
-
pcb
+关注
关注
4420文章
24022浏览量
426967 -
华强pcb线路板打样
+关注
关注
5文章
14629浏览量
44758
发布评论请先 登录
Flymaple V1.1:高性能四轴飞行器控制器板
四轴无人机控制核心丨笙泉新品(CGF062A) 融合MCU与MDE优势, 实现稳定高效的飞行表现

分布式推进垂直起降飞行器过渡走廊参数敏感性分析与总体设计优化导向研究

芯片电感/半导体模组磁性元器件在低空飞行器领域的应用范围及其作用
简仪科技产品在低空飞行器风洞试验数据采集设备中的应用

飞控开发者必看 | HPMicro Betaflight v0.1.0发布

低空飞行器(如eVTOL、物流无人机、城市空中交通飞行器)的适航认证

从技术验证到产业生态:垂直起降固定翼无人机主流构型的技术特征与演进路径对比研究

第四届飞行器健康管理技术国际高端论坛暨青年科学家论坛:昊衡科技,欢迎您来!

四轴无人机是如何工作的?

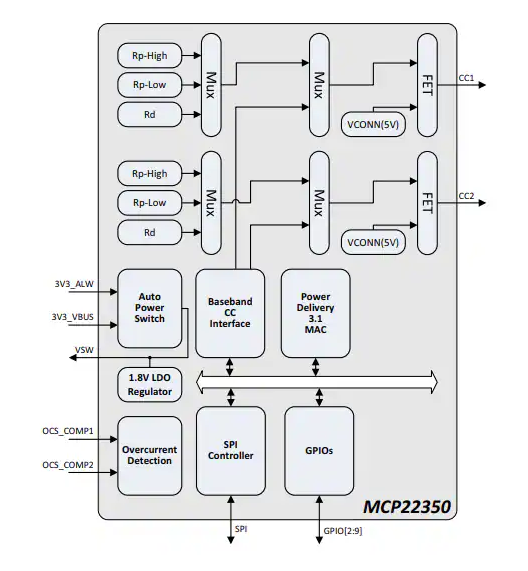
MCP22350 USB Type-C™ PD 3.1端口控制器技术解析
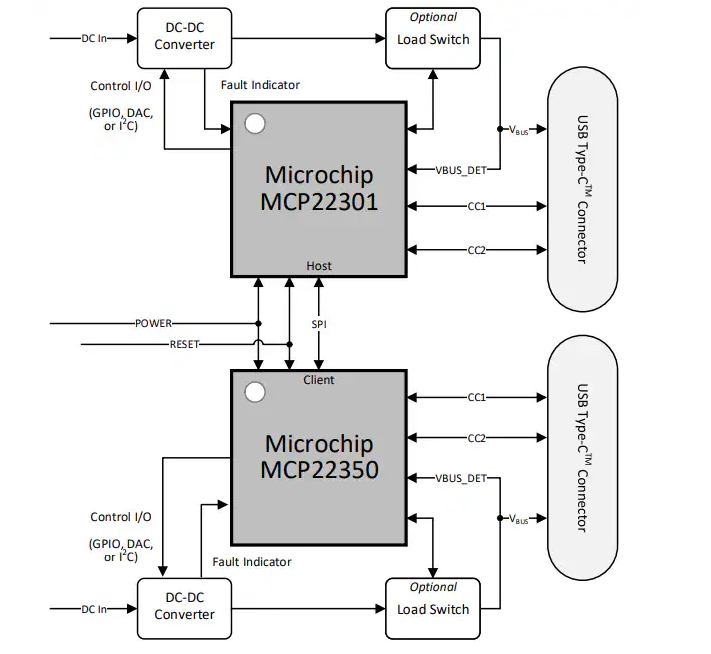
MCP22301 USB Type-C™ PD 3.1控制器技术解析与应用指南



评论