 自动驾驶雷达传感器迎来技术革命
自动驾驶雷达传感器迎来技术革命

众所周知,雷达技术的设计初衷是应用在军事领域,用于识别或者跟踪空中的军事目标。但是在自动驾驶发展势头蓬勃的今天,人们更多的是通过自动驾驶汽车领域的相关报道或者文献中了解雷达。自动驾驶中的雷达们是自动驾驶关键的一环——外部环境感知,提供最基本的技术支持。自动驾驶汽车在感知道路障碍物、行人等不确定因素时,发挥了巨大的作用。
以色列特拉维夫大学(TAU)一项研究发现,由光学相干断层成像技术(OCT)启发设计的低带宽雷达,可以摆脱无线电带宽的限制,以很低的带宽或者不需要任何带宽即可描绘出雷达周围的物体的高分辨率地图。这项研究打破了雷达技术开发领域的长期瓶颈,该项技术于上月刊登在Nature Communications上。
众所周知,雷达技术的设计初衷是应用在军事领域,用于识别或者跟踪空中的军事目标。但是在自动驾驶发展势头蓬勃的今天,人们更多的是通过自动驾驶汽车领域的相关报道或者文献中了解雷达。自动驾驶中的雷达们是自动驾驶关键的一环——外部环境感知,提供最基本的技术支持。自动驾驶汽车在感知道路障碍物、行人等不确定因素时,发挥了巨大的作用。
人们普遍认为,对距离的分辨能力,即区分两个位置接近的目标的能力,与发射雷达信号的带宽成反比。TAU的学者受光学相干断层扫描(OCT)启发,演示了另一种类型的测距系统,具有良好的距离分辨率,并且几乎完全不受带宽限制,与相同带宽的标准相干雷达相比,它对目标的分辨能力甚至提高了一个数量级以上,实现不需要带宽就能精确地创建高分辨地图的技术手段。
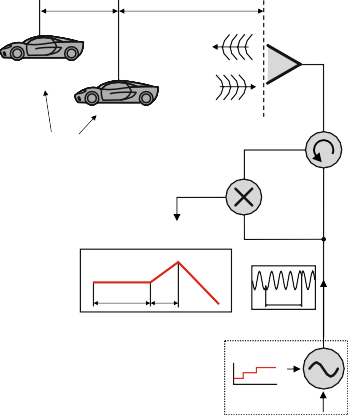
图中显示了三种不同的波:浅色最短,紫色居中,蓝色最长。光束的宽度表示每个不同的波。对于浅色波,由于其相干长度较短,来自汽车的反射信号不再与信号的静止发射部分相关。第一辆车反射的紫色波与发射信号相关,而第二辆车的反射则不相关,因此可以检测到第一辆车的距离。蓝色波具有最长的相干长度,与来自两个物体的反射相关,也允许检测第二辆车。雷达的相干长度(或时间)从最短扫到最长,扫描目标在视线内的位置。雷达系统的插图(右上角)示意图,是一个振荡器和可控的相干时间τc传播和混合反射的目标。相位切换N次和混频器的输出平均长度Nτc的窗口。通过扫描相干长度来重复这个过程,产生了作为相干长度函数的互相关系。
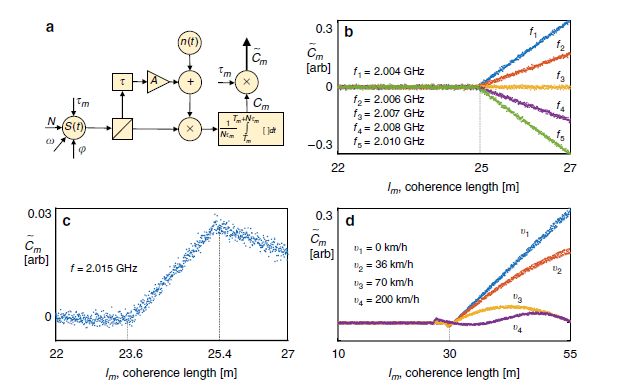
这是一张仿真结果及原理图。连续波信号生成N阶段跳跃随机生产提供一个常数(可控)相干时间τm(相位切换事件之间的时间)。每个脉冲都有一个脉冲持续时间保持不变随机相位(φn或向量φ)。信号从位于与延迟相关的距离的目标处反射,该距离由一个因子a衰减,并与附加白噪声一起接收。接收机的输出与传输信号的持续时间和平均传输时间Nτm(平均启动信号的同时开始传送) 混合在一起。集成的结果乘以τm相干时间。结果表示为互相关~Cm。对M个相干点(恒定相干长度)重复该过程。M和N定义了系统的性能(距离分辨率和距离精度)。
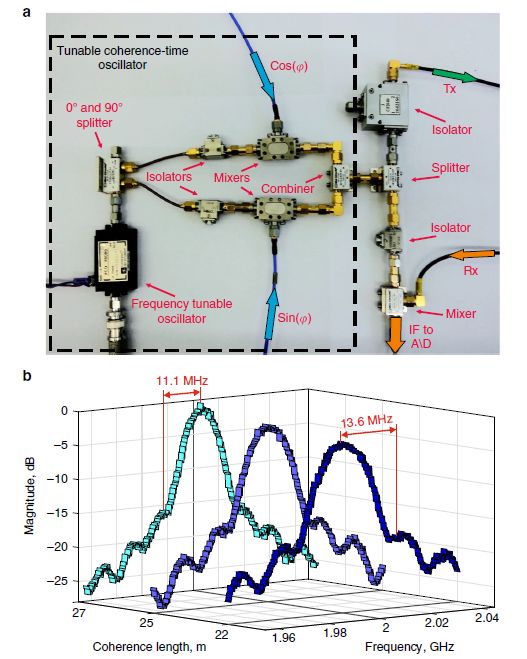
上图是实验实现和传输带宽测量结果。a是部分相干振荡器的实拍图。载波被分成两个象限,其中一个相位延迟90。每个臂乘以所需随机相位输出在t时刻的适当正弦或余弦项,将两个臂组合在一起,显示出具有所需相位跳变的单个载波、实现器和IQ矢量调制器。b图测量雷达从相干长度22-27m扫频时的半带宽,这对应与27.2~22mhz的传输带宽。随着带宽的增加,sinc函数的峰值降低,从而在整个扫描过程中保持传输功率。这些信号用于探索下图所示的场景。
光学相干层析成像(OCT)把光源有限的相干长度变成了一种优势,可以在生物组织内部进行亚毫米深分辨率的成像。通过扫过发射信号和反射信号之间的延迟,然后恢复相干函数的峰值,推导出被测散射目标的距离。虽然控制光源的相干长度仍然是一项技术挑战,但自一个多世纪前石英谐振器和零差接收机发明以来,电磁频谱的低频部分(低于1THz)一直受益于相干光源。如今,大量价格低廉的电子设备的出现,使得人们可以前所未有地控制传输电磁场的形状,以及精确地测量反射信号的相位。这些优点导致全相干源在我们今天所知的大多数雷达实现中占据主导地位。另一方面,在光学频谱之下,部分相干源在很大程度上仍未得到探索。
为了实现高距离和多普勒分辨率,人们提出了多种相干载波调制方法,从而实现了不同的雷达实现,如连续传输的调频连续波(FMCW)和具有非传输周期的编码脉冲雷达。值得说明的是,本文介绍的“相干”一词并不是指标准雷达中常用的积分方法,而是指发射波本身的性质。在这一点上,可能有人会问,为什么要费心改进开发良好的雷达系统?因为所有雷达信号都存在距离分辨率(区分两个位置相近的目标的能力)和发射信号带宽之间的联系,这导致人们认为这是一种牢不可破的关系。此外,距离精度,即已知到单个目标的距离的确定性,往往与带宽也有类似的负相关关系,这就迫使昂贵的高带宽应用在对距离精度和距离分辨率要求很高的领域,比如近年来很火热的自动驾驶行业。自动驾驶往往要求超过1ghz的带宽才能实现高于一米的分辨率,这就存在一个问题,高带宽意味着高价格,而自动驾驶商用进程中的最重要的一个问题就是控制价格成本,做消费者消费得起的自动驾驶汽车。
作为该论文的主要作者之一的Kozlov表示:“我们的概念在需要高范围分辨率和精度的情况下提供解决方案,但其可用带宽有限,例如自动驾驶汽车行业,光学成像和天文学”。Kozlov解释说,“今天路上行驶的汽车并不多,所以几乎没有分配频率的竞争。但未来会发生什么,每辆汽车都配备雷达,每个雷达都需要整个带宽?到那时,我们会发现自己处于一种无线电交通堵塞状态。我们的解决方案允许驾驶员在没有任何冲突的情况下共享可用带宽。”
-
雷达
+关注
关注
52文章
3377浏览量
124456 -
智能汽车
+关注
关注
30文章
3310浏览量
109674 -
自动驾驶
+关注
关注
794文章
14979浏览量
181397
原文标题:突破带宽限制,自动驾驶雷达传感器迎来技术革命
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
自动驾驶激光雷达无法识别反光背心吗?
自动驾驶激光雷达会伤害人体吗?

纯视觉自动驾驶的优势和劣势有哪些?

如何设计自动驾驶传感器失效检测与容错策略?
自动驾驶 ADAS 传感器车规电容:低 ESR + 抗电磁干扰选型指南
看不见的引擎:毫米波雷达线圈如何驱动自动驾驶
L4级自动驾驶数据采集系统首选
如何处理自动驾驶感知传感器脏污问题?

激光雷达传感器在自动驾驶中的作用
恩智浦4D成像雷达如何助力自动驾驶发展
自动驾驶中超声波雷达、激光雷达、毫米波雷达有何区别?

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证

自动驾驶汽车如何正确进行道路识别?

自动驾驶汽车是如何准确定位的?

激光雷达在自动驾驶领域中的优势




评论