 现今手术机器人能否取代医生完成手术?
现今手术机器人能否取代医生完成手术?
提到手术机器人,相信大家都在脑海里都会形成一个场景,是一个自动的机器人能够完全取代医生来做一些手术的操作,这是我们未来追求的目标,现实情况是我们目前在做的机器人有各种各样,还远没有达到那样的一个场景,但我们依然在朝着那个方向去努力。
据不完全统计,全世界大概有至少一百种以上的手术机器人,用在各个学科、各种形态,比如说有机械臂式的、多个机械臂式的、蛇形的各种各样的机器人。所以实际上对于手术机器人这个领域来说,目前是一个百花齐放的这样的时代。
遵循医生操作的主从型手术机器人
对于手术机器人,总的来说可以分成两大类。第一大类从 2000 年开始,在美国就已经有很多商业化的产品。最主流的、目前在全世界应用最广泛的,叫做主从型手术机器人。
图 | 主从型手术机器人
什么叫主从型手术机器人呢?它其实是遵循医生的遥操作来进行手术的一类机器人。医生手脚并用在控制台完成操作,机器人会摆在手术床旁,由机器人的三四个甚至最多有五个机械臂,来完成对医生的整个手术的跟踪。那么当医生进行所有的操作的时候,机器人在病人的体内完成相应的操作,所以我们把它称之为主从型的手术机器人。
这一类的机器人目前在腹腔手术、胸腔手术中得到了大量应用。但是我们今天所讨论的神经外科这个领域,这类机器人应用场景是比较小的,其中的原因就在于这种跟踪医生手术操作的机器人必须在一个有很好的手术空间的范围内,所以比如说在腹腔的腔道中,或者是在胸腔的腔体中,机器人可以有自由的空间去活动。
但是在神经外科这个领域,也就是我们说的脑手术这个领域,因为脑组织是一个实体,所以这种类型的机器人实际上是没有办法进行一个很好的操作的,那么就引出来了我们今天要讨论的第二大类的手术机器人,是叫做定位型的手术机器人。
图 | 导航型定位手术机器人
手术机器人帮助医生定位,解决神经外科手术大难题!
定位型手术机器人是怎么样解决神经外科中的问题的呢?我们先看一下神经外科的手术的需求。
在神经外科中,有一大类叫微创的立体定向手术,是希望能够把临床以前开颅进行的一些手术微创化。那么当微创的时候,对医生最大的挑战是什么呢?实际上也非常的明确,对于临床来讲,医生在看不到的情况下必须进行打孔、插入引导装置,最后插入它相应的电极、活检针或者是引流装置等等这类的问题。
在这样的一类需求下,对于医生来讲,我从哪个方向、从哪个位置来插进去是最需要的。那这样的一个手术术式对于临床来讲,就需要有一个自动的工具,或者是手动的工具来帮助医生完成定位,这就是神经外科叫立体定向手术的一大类的需求。
这个需求非常的广泛,它可以用在癫痫、帕金森、脑肿瘤、脑出血等等领域。比如癫痫手术,它甚至不只要插一根,还有可能要插多根电极到人的脑组织里面去。那怎样有一个更好用的工具来帮助医生,就是一个很重要的问题。
以癫痫为例,在中国癫痫大概有一千万的患者,其中 30% 也就是约 300 万的患者是药物难以控制的,这些患者里面很多是儿童,那么这些患者里面又有接近一半的患者是适合手术治疗的。可是实际的手术治疗每年只有一万例,那么这 1 万对 150 万的这样大的比例差是怎么造成的呢?
其中很重要的一个原因就在于我们并没有一个很合适的、很方便的手段来帮助临床进行这种微创的手术,那么现在是采用什么样的方式呢?因为刚才也讲了,对于这一类的手术里面最重要的是有一个帮助医生进行定位的工具。
给骨头钉颅钉?传统定位方式给病人带来巨大痛苦!
我们现在做的这件事情,实际上通过传统的方式也是可以实现的,但是实现的难度会远比机器人要高,现在是怎么实现的呢?
首先,病人在手术的当天早上,必须要在他的头上卡一个立体定向头架,这个头架是一个纯被动的机械装置,是需要在病人清醒的状态下直接钉到颅骨上,保证跟病人的头完全不动。在人的清醒的状态下,在前额和后脑勺钉四颗颅钉,直接钉到骨头上是一种怎样的痛苦?
虽然我们可以在局部打一些麻药,但是当你拧颅骨钉的时候对整个头皮的牵连也会造成巨大的痛苦。在实际手术时,病人躺到手术床前带着这样的一个框架,在上面上一个坐标弓,然后通过这样的一个坐标弓纯机械的方式,帮助医生完成定位,这就是整个的手术的方式。
从我刚才对手术方式的描述来看,这样的一个定位的框架对患者来说有很大的问题,第一个问题是患者需要在清醒的状态下带这个架子,对于病人特别是儿童患者非常地痛苦。
我以前跟过很多这样的临床手术,在手术的时候给儿童钉头架对于儿童来说非常痛苦,特别是在我有了小孩之后,这种场景我完全是无法去看的。所以从这样的角度来讲,这种清醒时佩戴头架,对于儿童会有巨大的创伤。
同时它有很多其他的问题,比如说消耗的时间长,需要几个医生反复地去对刻度尺,同时存在一些植入的死角,对于一些临床的术式是不适合的。那我们用什么样的方式可以去解决传统手术上的一些局限性呢?
我们希望下一代的产品应该痛苦小,没有死角,应该是个自动化的装置。由此我们研发了,我们新一代的神经外科的定位装置,也就是我们刚才提到的手术机器人。
手术机器人的”眼”、”手”、”脑”是如何协作的?
机器人由三个部分组成。第一部分,当然它要有一个手,也就是机械臂。第二部分,它要有一个眼睛,眼睛帮助机器人来定位病人的位置。第三部分,也是最核心的,它要有一个大脑,大脑帮助机器人自动地判断,它应该去什么样的位置,不应该撞到什么样的东西。这是组成整个机器人的三个部分。
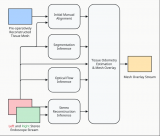
那么从这三个组成部分,就可以总结出我们机器人在实际手术中的流程。第一步,要通过计算机的大脑来实现手术路径的规划,也就是医生要基于术前的磁共振的影像、CT 的影像把它配准融合到一起,在术前就可以知道病人的脑子里面是什么样的一个情况,要基于什么样的一个通道,完成对病人的相应路径的穿刺定位。
第二步,当医生在术前的计划中把这个位置设计好之后,把机器人推到了病人的手术床前,机器人通过自己的眼睛,也就是我们现在采用的无接触式的激光定位,来完成对病人头部的定位。
当知道了病人的头实际在什么位置,第三步对机器人来说就很简单了,它可以自动地执行医生术前在磁共振或者是 CT 的影像上面规划的路径完成定位,医生在这个定位的位置上进行后期的手术操作。这就是整个机器人实际的操作流程。
那么我们逐步地来分析,机器人具体是怎么样操作的。从第一个手术计划的层面上,医生最关注的问题是规划一个怎样的路径,或者是多根路径,能够准确地达到我想要的位置。与此同时,最重要的是要避开颅内的重要血管,避免颅内出血。
机器人在这里做什么工作呢?它能够通过术前的磁共振或者 CT 的二维断层的片子实时地做出三维的重建,让医生直观地看到在病人的脑组织里面脑沟回长的是什么样子的,血管是长的什么样子的,可以直观地在三维的影像上面对路径进行规划,这样就可以看应该怎样避开颅内的血管。
所以这张图就可以看出,我们能够通过磁共振的影像,重建出三维模型的病人脑组织和血管,跟真实的实际病人开颅的照片做了一个对比,它的真实性非常的好,这一点对临床来说非常重要,因为临床要基于医生术前重建的影像进行路径规划,这个影像重建的真实与否,对于最终如何规避血管、避免颅内出血有重要的意义。
从这个角度来讲,我们的计划软件可以做到:第一,不受国外昂贵的软件采购的限制;第二,我们能够真正地把原来手术的出血的概率降低一半以上;第三,我们可以通过这样的一个规划软件,大幅度缩短医生传统规划的手术时间。我们的软件已经在全国大量的医院被使用,目前在全国已经有超过 5000 台的手术进行日常的使用。
当医生完成了术前的规划之后,第二步就是当机器人推到手术的床前时,手术机器人需要知道病人的头到底在什么位置,它才能准确地到达位置。那么它是怎么样知道的呢?
大家如果玩过 Kinect 游戏的话,实际上可以理解为是在机器人的前端装了一个超高精度的 Kinect,我们通过这样一个有深度信息的摄像头,或者是定位装置能够直接捕捉病人头的位置,拿到病人头的实际的位置和术前的影像上的位置这样的一个关系。
第三步机器人会自动地执行到预定的手术位置,医生就在机器人引导的这个位置上进行穿刺、打孔和植入的操作。图中也可以看出通过我们的机器人能够达到一个非常精准的定位精度,这对于临床是非常有效的。
那么从术后的这两幅影像上也可以看出来,彩色的部分是术前规划的路径,白色的是术后通过CT 重建出来的实际的植入位置,可以看出术后的植入位置跟术前的彩色的路径是高度的一致的,这个对于临床来说就解决了高精度的问题。
同时由于机器人有很好的定位方法,就完全不需要在病人术前再钉定向头架了,所以病人在术前是完全没有痛苦的。而且机器人由于它六个自由度的特点,它可以完全无死角地到达病人头附近的任何位置,同时能够保持很高的效率。
所以当机器人能够得到大量的临床应用的时候,它就可以使整个的手术时间下降 60% 以上。那么未来在全国能够开展癫痫外科的医院数量就会大大的提高,因为手术整个的复杂度得到了大大的降低,同时能够汇集的患者数量也会成倍的增加,这是我们机器人目前在临床上一个非常重要的意义。
神经外科已经走向了机器人微创的时代,它对于临床的意义非常的重要,神经外科的发展方兴未艾,未来在癫痫、帕金森、甚至老年痴呆等等领域还有广阔的空间需要去努力,其中定位的工具和微创的治疗方式也需要不断地革新和创新,这是我们一直以来努力的目标。
从我们大量接触临床病人、接触神经外科的十几年时间来看,我们整个团队坚定地希望,在这个领域能够降低医生的操作门槛、减少病人的手术痛苦,希望能够开发出未来智能、高效、精准的手术机器人,这将会极大地降低患者的痛苦、提高手术的成功率、降低手术的风险。
-
机器人
+关注
关注
210文章
28191浏览量
206494 -
手术机器人
+关注
关注
2文章
128浏览量
15911
原文标题:手术机器人真的可以取代医生了吗?
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
借助NVIDIA Holoscan实现实时手术指导
基于模型的显微手术机器人设计

滑环在手术无影灯的应用
医疗机器人有什么用
医疗机器人的优缺点_医疗机器人涉及哪些技术
NVIDIA边缘计算助力uAI-MERITS革新机器人手术
微型导轨:手术机器人的高精度“骨骼”

FMEA在手术机器人研发中的应用
讯维数字孪生可视化系统:开启智慧医疗虚拟手术训练新纪元

面向狭窄腔道医疗作业的微型机器人
达芬奇手术机器人的应用领域
Samtec细分类应用科普 | 用于手术/医疗设备的连接器






 工商网监
工商网监
评论