 自动驾驶基础 惯性测量单元(IMU)
自动驾驶基础 惯性测量单元(IMU)
现在随着陀螺仪的发展,技术越来越成熟,陀螺仪的结构和原理都有着很大的变化。由于设备对偏转度的要求越来越精准,已经出现了高精度陀螺仪这一概念,完全不局限在传统的机械陀螺仪当中。所以,对于陀螺仪的分类,除了上述按照陀螺仪的发展阶段以及技术特点的分类外,还可以按照陀螺仪的精度性能来分类。
陀螺漂移是陀螺仪性能高低的主要表征。陀螺漂移是由于制造上的缺陷及干扰产生的偏离稳定的输出,用度/小时表示。按照精度性能,陀螺仪可分为以下三类:
1. 高精度陀螺(惯性级)
陀螺漂移率优于0.001度/小时(1σ),主要用于洲际导弹、核潜艇、远程运载火箭、战略轰炸机等战略武器。
2. 中精度陀螺(导航级)
陀螺漂移率优于0.01度/小时(1σ),用于战术飞机、水面舰船、先进战车以及各类新型导弹等的导航与制导。
3. 低精度陀螺(速率级)
陀螺漂移率为0.1~1度/小时(1σ),用于工作时间较短的、精度要求相对较低的惯性系统,如各类战术武器、各种稳瞄平台、无人运载器、飞机航姿系统等。
以漂移率优于0.01度/小时(1σ)的导航级陀螺为例,它能使用户获得大约1海里/小时的位置精度和1毫弧度的方位精度。而漂移优于0.01度/小时的概念是,它必须能测量1/1000的地球自转角速率(地球自转角速率为15.0411度/小时)。这意味着,这种仪表应能测量相当于每3年(几乎1000天)旋转1圈的物体的旋转角速度。如果是在捷联式惯性导航系统的机械编排下,它还必须能测量运载体全部的旋转角速率,这个角速率可能是3000度/秒(约107度/小时)或更高。因而,导航级陀螺必须具有10-2~107度/小时的动态范围,跨度约为9个数量级。大多数导航系统还要求这种测量非常频繁地进行,为100~200次/秒。如此苛刻的要求就是陀螺仪表如此复杂和昂贵的原因。
下面就来介绍一下,近年来成功开发的高精度陀螺仪。
一.静电陀螺仪
虽然传统的机械陀螺仪已经满足不了用户、或是场景变换上的精度需求了,但并不意味着包含转子结构的陀螺仪已经完全退出了高精度陀螺仪队伍当中。其身为机械陀螺仪的升级版本,静电陀螺仪利用电场克服了转子旋转的摩擦力,大大提高了陀螺仪的精度。可惜生产难度较大,限制了其大规模的应用。
二.压电陀螺仪
对于经常接触传感器的人都会知道,在需要完成测压力这一任务的时候,我们基本会采用压电传感器。但对压电陀螺仪并不清楚,压电陀螺仪是一种振动陀螺,依靠压电材料的压电效应,当角速度不同时,贴在不同方向上的压电薄片的电压也出现偏差,依此测量角速度。作为高精度陀螺仪,压电陀螺仪的抗干扰能力也十分强大,甚至经受的动态核爆实验也没有损坏,因此多用在军工方面。
三. 光纤陀螺仪
光纤陀螺仪可谓顺应着时代的陀螺仪潮流而诞生,其具有精度高,体积小等特点,而且在成本方面也非常低,占据着绝大的地位,几乎完美。该种类的高精度陀螺仪利用的是光在转动光纤线圈内光程随角速度大小的变化,利用干涉来显现出来。目前光纤陀螺仪由于精度和价格的原因,往往在使用者的首选名单之中。
说到微机械陀螺仪,很多人认为是低成本低精度要求的产品,因为MEMS陀螺仪的产生和发展,才使的这一技术应用到对成本特别敏感的智能手机等移动设备中,并促进了惯性导航技术的发展。
单轴和双轴MEMS角速度传感器(陀螺传感器)产品主要用于游戏机、输入设备、导航仪、PND(Portable Navigation Device)及数码相机等。单轴产品可检测偏摆方向。双轴产品备有可检测俯仰方向及滚转方向的品种,以及可检测俯仰方向及偏摆方向的品种。可检测的角速度因品种而异,最大为30~6000度/秒。输出为模拟信号。各产品备有对各轴信号进行1倍(无放大)输出和放大至4倍的两个端口。降低了温度误差以及随时间变化的误差。零点温度漂移为0.05度/秒/℃。噪声方面,可检测的角速度为最大30度/秒的品种控制在了0.014度/秒/√Hz。
但是实际上,MEMS陀螺仪经过系统级校准,也是可以做成高精度的产品的,并在逐步替代光纤陀螺仪。
高精度陀螺仪是随着科技的发展,时代的需要下的产物,只有技术的不断完善,或是有新的研发,这才是时代的潮流。
下面是常见的陀螺仪性能指标与解释
零偏
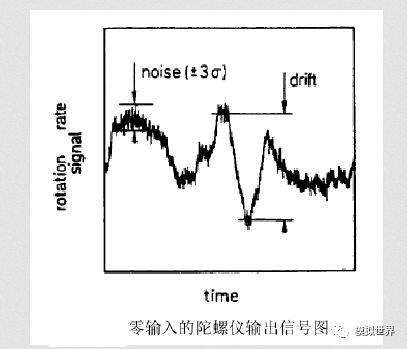
零偏,又称为零位漂移或零位偏移或零偏稳定性,也可简称零漂或漂移率,英文中称为drift 或bias drift。零偏应理解为陀螺仪的输出信号围绕其均值的起伏或波动,习惯上用标准差(σ)或均方根(RMS )表示,一般折算为等效输入角速率(°/ h) 。在角速度输入为零时,陀螺仪的输出是一条复合白噪声信号缓慢变化的曲线,曲线的峰-峰值就是零偏值(drift ),如下图所示。在整个性能指标集中,零偏是评价陀螺仪性能优劣的最重要指标。
分辨率
陀螺仪中的分辨率是用白噪声定义的,如图2-6 中所示,可以用角随机游走来表示,可以简化为一定带宽下测得的零偏稳定性与监测带宽的平方根之比,其单位为 °ℎ−1 °。角度随机游走表征了长时间累积的角度误差。角随机游动系数反映了陀螺在此处键入公式。的研制水平,也反映了陀螺可检测的最小角速率能力,并间接反映了与光子、电子的散粒噪声效应所限定的检测极限的距离。据此可推算出采用现有方案和元器件构成的陀螺是否还有提高性能的潜力。
标度因子
标度因子是陀螺仪输出量与输入角速率变化的比值,通常用某一特定的直线斜率表示,该斜率是根据整个正(或负) 输入角速率范围内测得的输入/输出数据,通过最小二乘法拟合求出的直线斜率。对应于正输入和负输入有不同的刻度因子称为刻度因子不对称,其表明输入输出之间的斜率关系在零输入点不连续。一般用刻度因子稳定性来衡量刻度因子存在的误差特性,它是指陀螺在不同输入角速率情况下能够通过标称刻度因子获得精确输出的能力。非线性往往与刻度因子相关,是指由实际输入输出关系确定的实际刻度因子与标称刻度因子相比存在的非线性特征,有时还会采用线性度,其指陀螺输入输出曲线与标称直线的偏离程度,通常以满量程输出的百分比表示。
动态范围
陀螺在正、反方向能检测到的输入角速率的最大值表示了陀螺的测量范围。该最大值除以阀值即为陀螺的动态范围,该值越大表示陀螺敏感速率的能力越强。
带宽
带宽是指陀螺能够精确测量输入角速度的频率范围,这个频段范围越大表明陀螺的动态响应能力越强。对于开环模式工作的陀螺,带宽定义为响应相位从0到滞后90度对应的频段,也可等同定义为振幅响应比为0.5 即3dB 点对应的频段。对于闭环模式工作的陀螺,带宽定义为控制及解调电路的带宽,一般指解调电路中使用的低通滤波器的截至频率。电路带宽实际上是反映该电路对输入信号的响应速度,带宽越宽,响应速度越快,允许通过的信号频率越高,若频率为某一值的正弦波信号通过电路时其能量被消耗一半,则这个频率便是此电路的带宽。
-
光纤
+关注
关注
19文章
3918浏览量
73200 -
陀螺仪
+关注
关注
44文章
784浏览量
98717 -
自动驾驶
+关注
关注
784文章
13814浏览量
166463
原文标题:自动驾驶基础(六十四) -- -惯性测量单元(IMU)十
文章出处:【微信号:Analog_World,微信公众号:模拟世界】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
ADIS16470微型MEMS惯性测量单元(IMU)英文手册
微小层面的专用惯性测量单元——M-G364PDCA

爱普生的惯性测量单元(IMU)M-G370PDT成为无人驾驶的理想选择
北微车规级惯性测量单元(IMU)芯片项目正式启动

雷达精准探测的臂助——爱普生新款惯性测量单元HGPM01






 工商网监
工商网监
评论