 西门子1200与KUKA机器人编程通信实例
西门子1200与KUKA机器人编程通信实例
早段时间分享了不少ABB和发那科工业机器人的资料和实例,但是也有很多朋友问我,库卡的资料有吗?小编也理解身为一个工控技术人员必须具备孙悟空一样的本领,不仅要会各种品牌的PLC编程而且更要掌握各大品牌工业机器人的应用,这样才能在自己的职业道路上不断发张不断进步,不容易!所以呢,小编在中华工控网上搜集了一篇关于西门子S71200与KUKA机器人的组态、通讯和编程的文章,今天我们以文字结合图片的形式,一起来学习一下。
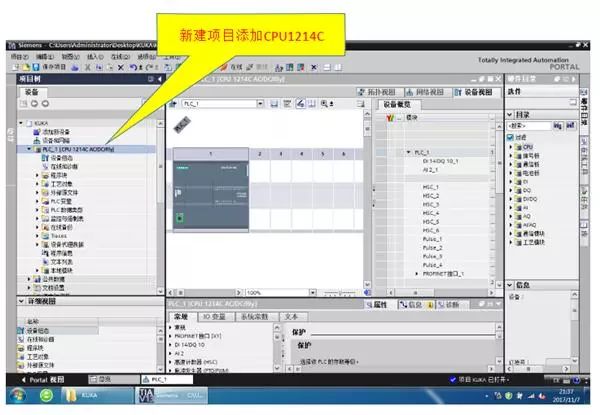
第一步:在博途新建项目,添加CPU1214C。
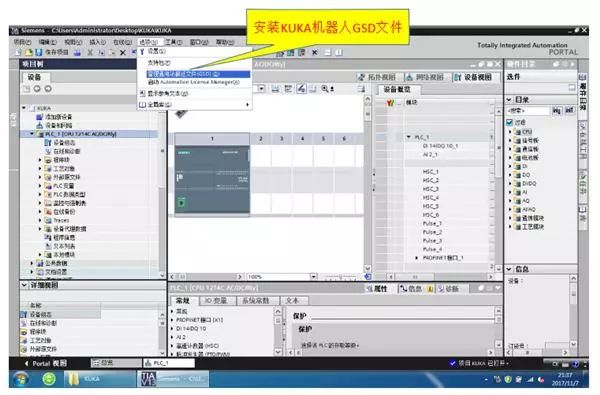
第二步:安装KUKA机器人GSD文件。
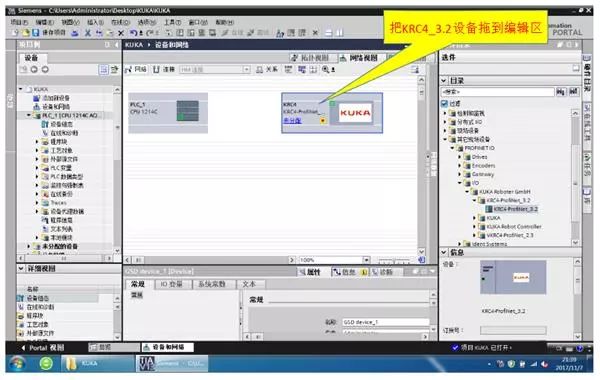
第三步:在硬件目录选中“KRC4_3.2”硬件组件。

第四步:把选中的硬件组件拖放到网络视图编辑区。
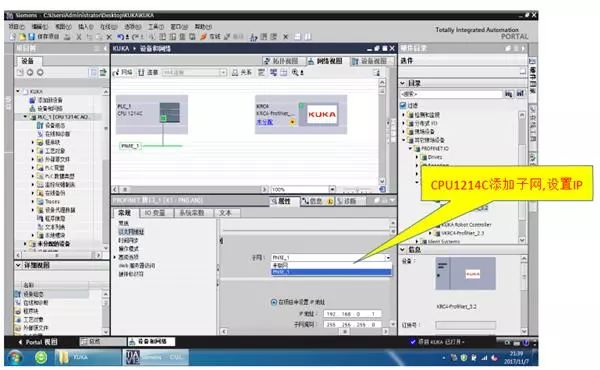
第五步:为CPU1214C添加PROFINET子网,并设置IP地址192.168.0.1
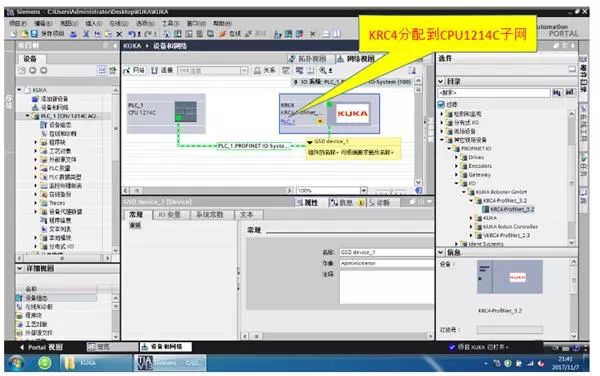
第六步:将KUKA硬件组件分配到PROFINET子网,点击“未分配”。
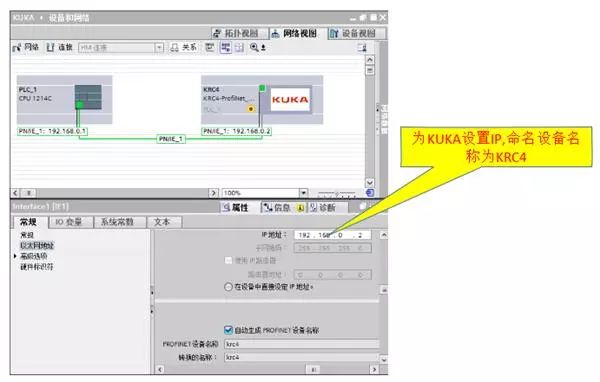
第七步:选中KUKA网络接口,点击鼠标左键,在以太网地址对话框设置IP地址为192.168.0.2和PROFINET I/O设备名称为KRC4。
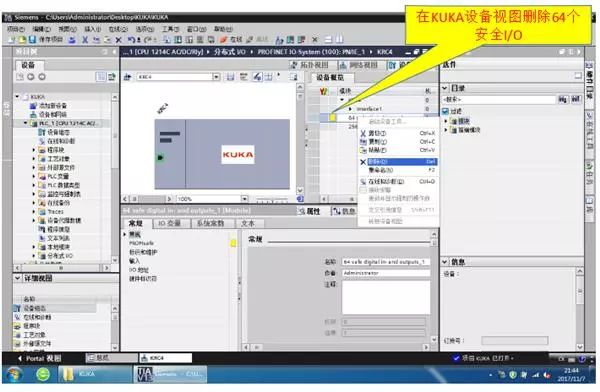
第八步:进入KUKA设备视图删除64个I/O安全模块和256个I/O模块。
第九步:重新添加I/O模块,将64个I/O模块添加到模块列表,之后编译下载硬件组态。

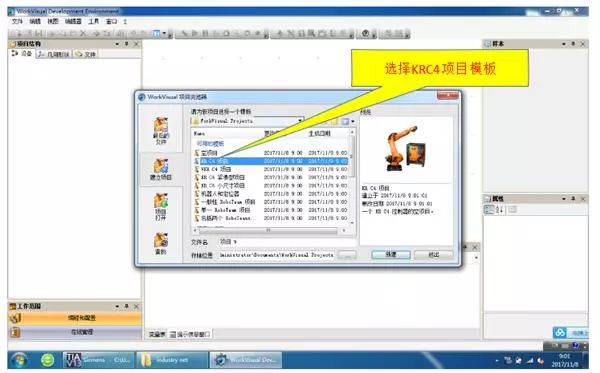
第十步:双击“WORK VISUAL”图标,打开KUKA机器人设置软件。
第十一步:在项目浏览器中选择“KRC4”项目模板
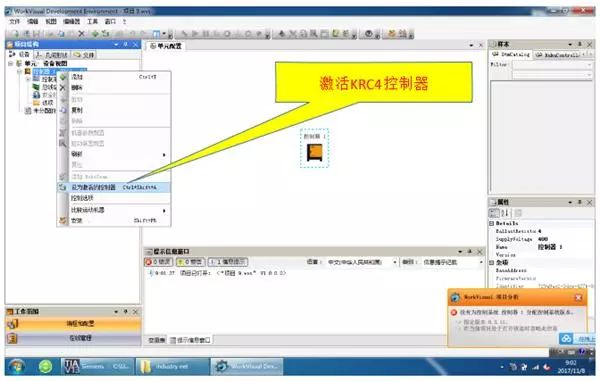
第十二步:在项目结构选中“控制器”点击鼠标右键,选择“设为激活控制器”
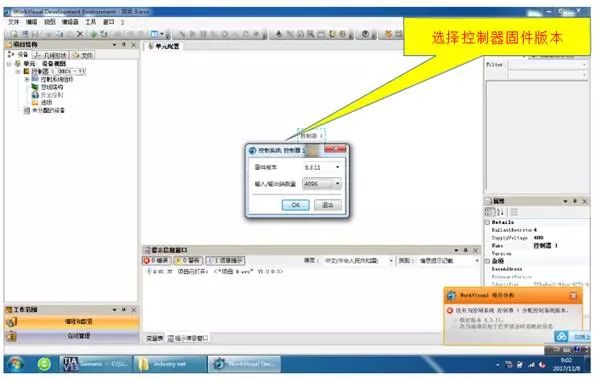
第十三步:选择对应的固件版本,点击“OK”按钮
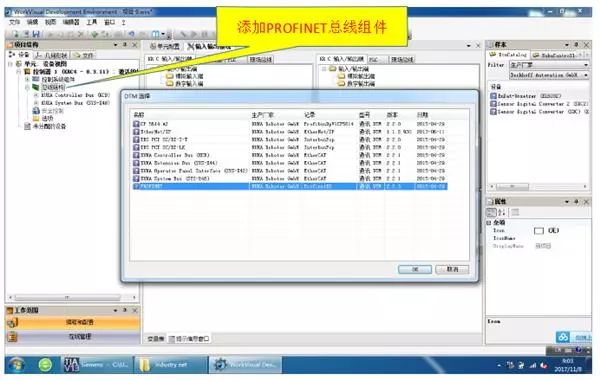
第十四步:在项目结构选中“总线结构”点击鼠标右击,添加PROFINET总线组件
第十五步:在项目结构选中“PROFINET”点击鼠标右击,添加PROFINET I/O设备。

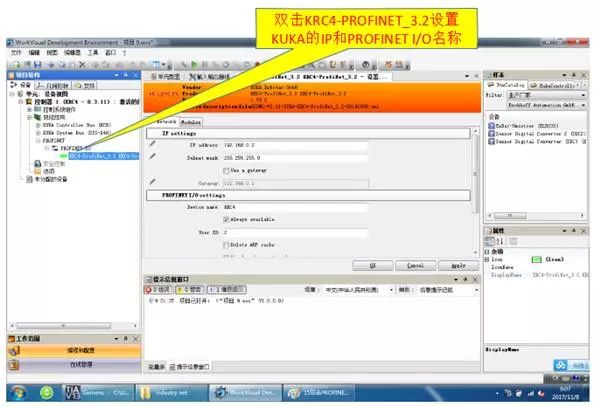
第十六步:双击“KRC4-PROFINET_3.2”设置KUKA总线IP地址为192.168.0.2和设备名称为“KRC4”,确保与PLC组态的名称一致。
第十七步:将KUKA输入端口映射到PROFINET I/O地址

第十八步:将KUKA输出端口映射到PROFINET I/O地址

第十九步:下图是KUKA机器人输入和输出端口已映射完成的画面

第二十步:点击“安装”按钮将配置下载到控制器。

第二十一步:点击“生成代码”按钮

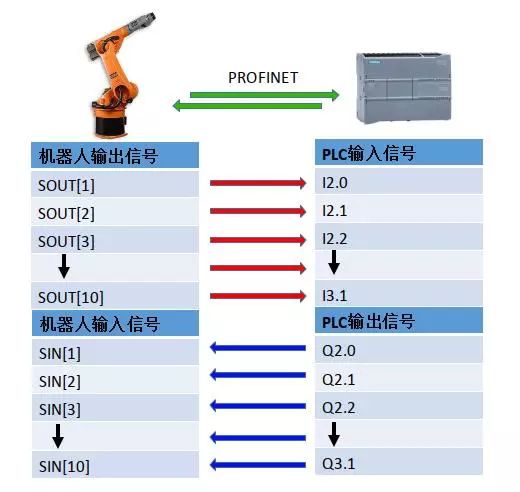
第二十二步:下图是机器人和S71200的输入和输出地址对应。
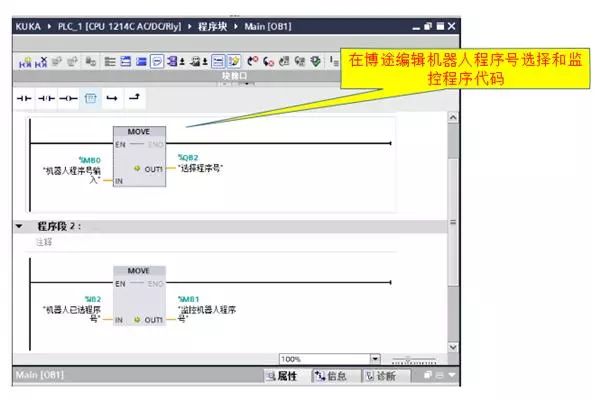
第二十三步:通过MOVE指令完成机器人程序号选择和程序号选中监控
-
机器人
+关注
关注
210文章
28180浏览量
206331 -
以太网
+关注
关注
40文章
5371浏览量
171032
原文标题:西门子1200与KUKA机器人编程通信实例
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
雅马哈机器人配置方法之西门子S7-1500控制技巧分享
ABB工业机器人与西门子S-1200 PLC通信的实现
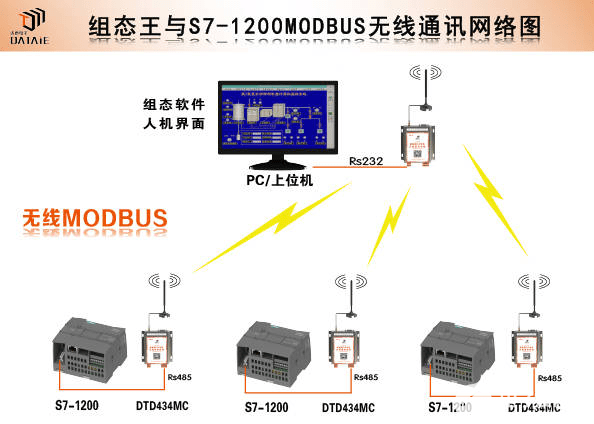
西门子S7-1200与组态软件之间无线MODBUS通信实例
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统






 工商网监
工商网监
评论