 L5级自动驾驶到底能给我们带来什么?
L5级自动驾驶到底能给我们带来什么?
汽车领域技术创新、格局演变,这是全球汽车人都在关注的重要议题。当世界汽车巨头都在强调“中国市场”之时,我们试图将目光转向全球:面对汽车产业新四化,世界级的汽车玩家正在做什么?
第一站:探秘密歇根M-city实验室,对话自动驾驶领域重要人物彭晖。
2015年7月20日,位于美国底特律以西40英里的密歇根大学正式开放全球首个无人驾驶汽车封闭试验场:M-city。从加州伯克利大学博士毕业、近30年来一直围绕汽车安全与节能做研究的密西根大学讲座教授彭晖,参与并主导了M-city从构想到实现的全过程。M-city之后,在美国硅谷、新加坡维壹科技城、中国上海、日本茨城县等多地先后建起自动驾驶测试场。
如今,你可以看到密歇根大学的学生和教职工们搭乘12英里/时的无人驾驶校园巴士在园区内穿梭。这是M-city实验室项目的一部分,终极目标是让无人驾驶更安全。对于这个重要议题,M-city和它的顶级工程师们有着清晰的计划和判断,但也毫不避讳当下还未攻破的技术难题,和对未知的不确定。
口述 | 密歇根大学M-city实验室主任 彭晖
采访 | 搜狐汽车驻底特律记者 丽莎
1、故事的开始
2013年,我们开始构想建立一个无人驾驶测试场。为什么会有这个想法呢?
其实1988-1992年,我在加州伯克利分校念博士,论文题目就是高速公路自动化,当然那个时候场景比较简单。这么讲起来,让汽车驾驶实现自动化不是这几年才有的事情,比我们更早的时候就有人尝试用磁条、磁钉、camera(摄像头)来做研究。所以把“驾驶功能自动化”这件事已经有几十年的研究背景了。
当年为什么要建M-City?
因为我们认识到技术、硬件有很多进步,包括感测器、计算能力、人工智能、通信……在太多太多方面已经有大规模的进步,我们觉得时机比较成熟了。所以 2013年左右就开始构想这件事情,2015年7月就正式开放了。我们确实是全世界第一个为智能网联汽车建造的自动驾驶测试场。
M-city是密歇根大学牵头来做的,目前已经投了大概1200万美金,土地是无偿给我们用的。M-City是开放的,不论是不是我们的会员,任何车企都可以来做测试。当年盖这个场地的时候,目的就不只是为高校教授、研究生做实验用的。我们现在有60个缴费企业会员,其实目前所有测试者中,校外企业占到7、8成。
那我们做什么测试呢?
M-City主要有两大场域,一个是高速公路,一个是城区。高速公路上有匝道、变道、超车等场景测试;城区里最糟糕的就是路口,在测试的时候我们重点会研究如何控制行人、自行车等和自动驾驶车辆的互动。
我们自己对未来有非常清楚的计划,叫做L4级别的ABC Test。我们想象有一辆车来测试,必须要通过三道关卡。A是Accelerated evaluation 加速验证;B是behave competence,表示说要达标几十项技能;C是corner cases,有一些特别容易出错的场景。
我们的想法是,未来车辆测试过程中,要保证达到一定的标准,就要通过ABC Test这三关测试。未来一年我们会先把behave competence做出来。
其实在测试过程中,目前没有什么统一的测试标准。美国没有,中国没有,日本没有,欧盟没有,全世界都没有标准。
比如你说在欧盟做NCAP(新车碰撞测试),它有一套程序,那是欧盟自己定的,中国、日本、美国不见得完全听它的;像在美国做高速公路安全测试的IIHS(美国公路安全保险协会),它不是政府机关,是属于第三方的,没有政府的公信力。
2、还未攻破的技术难题
现在研究自动驾驶的机构非常多,自动驾驶最重要的技术,一是sensing(感测);二是perception(感知),就是知晓到底看到了什么东西;三是planning(规划);四是control(控制)。这每一项都很重要,需要相互补充。但如果说现在自动驾驶技术面临的最大挑战和瓶颈,那就是perception。
人是很聪明的,比如在一个交通场景中,我一眼就能看出来这是一辆黑颜色的汽车、这是一个油箱、这是一辆自行车、旁边有一棵树……人类不会因为辨别事物而困惑,立刻就能抓到重点。但感知对于机器来说还是很有挑战性的。汽车实际“看”到的我们叫点云:这个pixel是什么,那个距离是多少,然后再去思考那个是车吗?那个是人吗?现在虽然机器已经很厉害了,比如下围棋超过了人类,但是在perception(感知)层面机器还远远不如人类。
在perception方面,我们大概有一个方法可以解决98%、99%的问题,但那剩下的1%、2% 越来越难解决。你从0到80很容易,从80到90难度变大、90到95更难,最后那1% 最难。你问我有没有把握push到99.99%?其实没有人有把握。
历史上我们做过很多不同的approach(方法)。比如现在是用神经网络,我用大量的资料去做训练。完了以后我一看,哟,它可以做到98%,很高兴。可是你说下一步从98% 怎么到99% ?坦白说不太清楚,因为它太复杂,它是一个神经网络。甚至我们在训练的过程中,结果时好时坏。比如今天有一个神经网络我调到了98%,并不表示继续调会变成99%,搞不好会变成95%,所以不同的方法往前走的路径其实是不清楚的。
那怎么解决这个难题呢?
我们常常说最终的解决方式可能是结合几个99%的solution(方法),达到一个99.999% 安全的程度。而不是一直push一个方法达到99.99%,那个太困难。
3、一个负责的车企不应该做L5自动驾驶
我们研究自动驾驶,从一开始大家觉得特别火、特别激进,到现在又进入到过度悲观。这里有一个现象叫hype cycle(发展规律周期)。不只是自动驾驶,包括我们讲的3D打印、人工智能、5G、电动车等等,任何新的观念出来,大家一开始都会过度乐观,然后过度悲观,最后回归理性,过程常常都是这样。这是好多年来大家已经都承认的,社会就是这样。
现在自动驾驶正在从过度乐观向过度悲观发展,慢慢还会反弹回归理性。
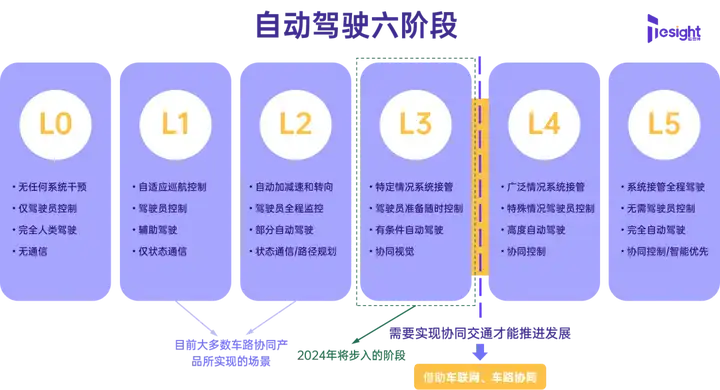
至于什么时候自动驾驶可以达到L5级别?
我们常说operational design domain(ODD),自动驾驶系统设计的时候就画定了运营范围,在这个场景之下必须有把握能做好。
那么现在市面上有没有L4?有啊,我们密歇根大学不是有无人巴士嘛,它跑得很慢,每小时12英里,只在校园内运行。法国、奥地利、澳洲、新加坡好多地方都有L4级无人巴士。如果你仔细去看的话,全世界做L4级别展示的汽车,要么是直线来回,要么是顺时针转圈,不用左转。
就是说这个operational design domain 是12英里/小时只能右转不左转,下雨、下雪天就不开了。我们得认清现实,技术不完全成熟,只能在小范围内跑。但是好处是什么呢?不会撞死人,不会撞伤人,在这里面跑得挺好。那明年是不是可以把12英里/小时变成15英里/小时?是不是下点小雨还可以开?
实际上,我不认为我们哪一天会看到L5的汽车。
为什么呢?设计汽车都有它的目的,如果要卖到沙特阿拉伯,对冷却系统就有额外要求;如果要卖到南极,就要重视低温环境;如果要买到北美市场,就要用北美的data(数据)去train(训练自动驾驶神经网络);如果要卖到中国,就应该用中国的data去train。
换句话说,今天设计一个L5的汽车其实是在浪费钱、浪费时间。身为一个负责任的工程师,我不应该说我要设计一个L5的汽车,而应该说我设计的L4汽车在这个范围内保证安全,且最低成本。这才是一个负责的工程师该做的事情。
所有的车在未来几十年之内都应该只有L4级别,谁要是说我设计一个L5,其实大部分时候他是在浪费钱。我不认为一个负责的车企应该去设计一个L5的汽车,追求L5不应该是一个工程师的目的。
-
自动驾驶
+关注
关注
784文章
13877浏览量
166618
原文标题:彭晖:做L5级自动驾驶是浪费钱
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伊予铁巴士公司启动L4级自动驾驶公交商业运营
通用汽车正全力推进L3级自动驾驶系统的开发
经纬恒润全冗余R-EPS助力L4级自动驾驶落地

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
Mobileye引领自动驾驶新纪元:L4级无人驾驶系统在德国成功路测
百度发布全球首个L4级自动驾驶大模型
雷诺集团将与自动驾驶公司WeRide达成合作
百度发布全球首个L4级自动驾驶大模型Apollo ADFM
未来已来,多传感器融合感知是自动驾驶破局的关键
NVIDIA和昊铂宣布双方将合作量产L4级自动驾驶汽车

百舸争流之势!L3级自动驾驶进入路测阶段
康谋方案 | L2进阶L3,数据采集如何助力自动驾驶





 工商网监
工商网监
评论