 RPWM技术在噪声的工业电机控制驱动器中应用方案
RPWM技术在噪声的工业电机控制驱动器中应用方案
在功率电子中,根据特定应用,已经成功地采用了几种脉冲宽度调制(PWM)方案。大多数传统PWM方案(本质上是确定性的)生成预定的谐波含量。这可能会在实际应用中产生许多问题,如噪声、无线电干扰和机械振动。在需要减轻对环境和其他设备的干扰的应用中,例如工业电机驱动器、牵引驱动器、电动汽车,传统的PWM方案因自身原因不能高效地运行,需要添加如电磁干扰(EMI)滤波器等附加设备。有一种方法可以应对这些问题,就是增加传统PWM方案的开关频率,即> 18kHz。不过,这会导致开关损耗显著增加。在这种应用中,已经发现随机脉冲宽度调制(RPWM)可以有效地减轻这些问题,且不用显著增加开关频率。
在RPWM中,每个开关脉冲的宽度随机变化。这导致谐波簇在很大范围内扩散,从而减小了单独滤波器的尺寸,或完全避免在某些应用中使用滤波器。RPWM技术已成功用于许多功率电子应用中,例如 在需要检查噪声的工业电机控制驱动器中。
通常,使用DSP和FPGA实现用于复杂商用系统的高频PWM和RPWM信号。不过,这些器件更通用、功能更强大、且更灵活,自然也就比较贵。使用低成本的Dialog CMIC可以满足RPWM生成所需的相似精度和高频时序要求。许多合适的RPWM方案,尤其是开环应用,可以用Dialog CMIC来实现。因此,嵌入式DSP、MCU或FPGA的显式编程或编码可以由GreenPAK? designer中提供的简单接口所取代。此外,整个控制电路的尺寸也会显著减小。
有几种方法可以为三相逆变器应用生成RPWM。此应用笔记中,我们介绍了一种合适的RPWM技术,它可以使用现成的GreenPAK CMIC资源来实现。RPWM技术使用双矩阵CMIC SLG46620实现。还提供了适当的理论建议和实验结果,包括输出电压波形及其谐波含量,可以证明所建议的策略是合理的。
建议的RPWM方案
驱动三相逆变器的RPWM方案的框图如图1所示。
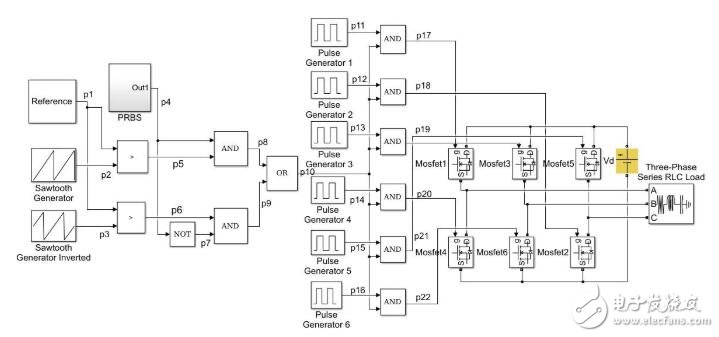
图1:建议方案的框图
两个锯齿信号,标记为p2和p3(值范围:0-1),相位相差180°C,与恒定值p1(值范围:0-1)进行比较,得出标记为p5和p6的不同类型的脉冲。p5和p6脉冲的波形如图2和图3所示。采用图4所示波形的二进制伪随机数发生器(标记为p4),使用上面框图中所示的逻辑运算符从信号p5和p6中随机选择一个脉冲。这会生成一系列脉冲p10,如图5所示。信号p10通过AND门,同样的还有脉冲发生器1到6所生成的10ms长脉冲,标记为p11、p12、p13、p14、p15和p16。请注意,对于完整的180?C导通模式,脉冲发生器的输出脉冲相对于彼此有60?C的相位差。最后,在AND操作之后,信号p17、p18、p19、p20、p21和p22成为三相逆变器的功率级中采用的功率开关的栅极驱动信号。
根据施加的栅极信号接通和断开开关(通常是MOSFET或IGBT),以获得逆变器输出端的三相平衡电压波形。
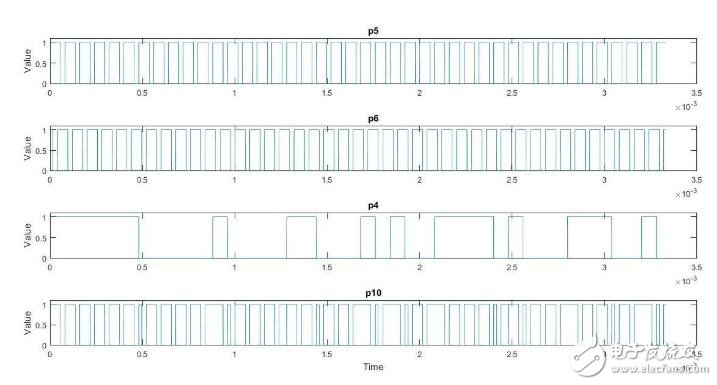
图2:RPWM方案中几个阶段的模拟信号波形
在Matlab/Simulink环境中对50 Hz(基波)RPWM三相逆变器系统进行仿真,相间输出波形如图3所示。输出电压波形有效地由随机信号p10调制,并实现120 ?C 的相移。
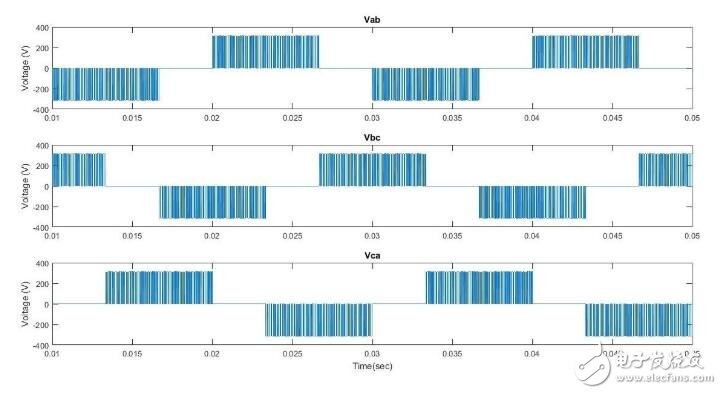
图3:模拟的输出相间电压波形
参考值的选择
参考信号p1提供了一种根据主观声响应控制特定应用的逆变器输出的频谱内容的方法。从1到0.5的参考值变化使频谱内容变平,从而减轻了开关频率倍数处的尖峰。不过,这也降低了信号基波分量的幅度。图4显示了对于Vdc = 312V和载波频率= 12.5kHz,输出相间电压的频谱内容如何在参考值从p1 = 0.8减小到p1 = 0.5时发生变化。
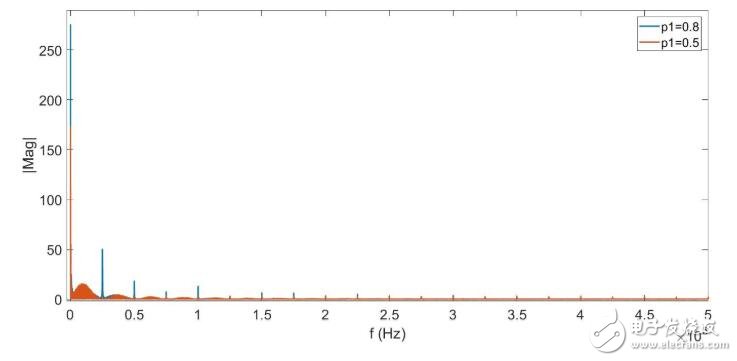
图4:频谱随参考值的变化而变化
不推荐将参考值进一步降低到0.5以下,因为开关频率的倍数尖峰开始增多,而且基波分量也会降低。
GreenPAK设计
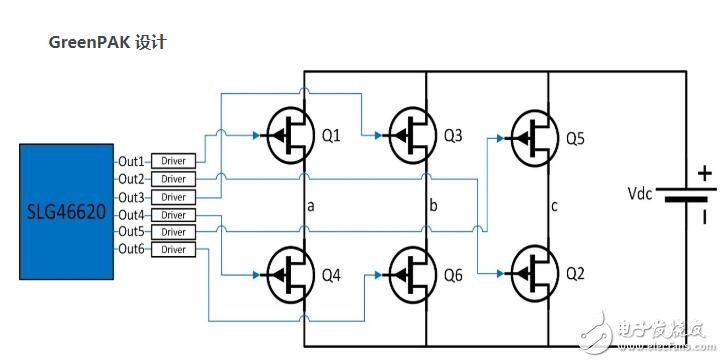
图5:SLG46620在RPWM方案中的角色
图5显示了Dialog CMIC SLG46620如何在整个方案中发挥功能。CMIC的基本操作是生成随机PWM调制信号,该信号施加在逆变器功率级中使用的开关装置的栅极端子处。

图6:设计矩阵0
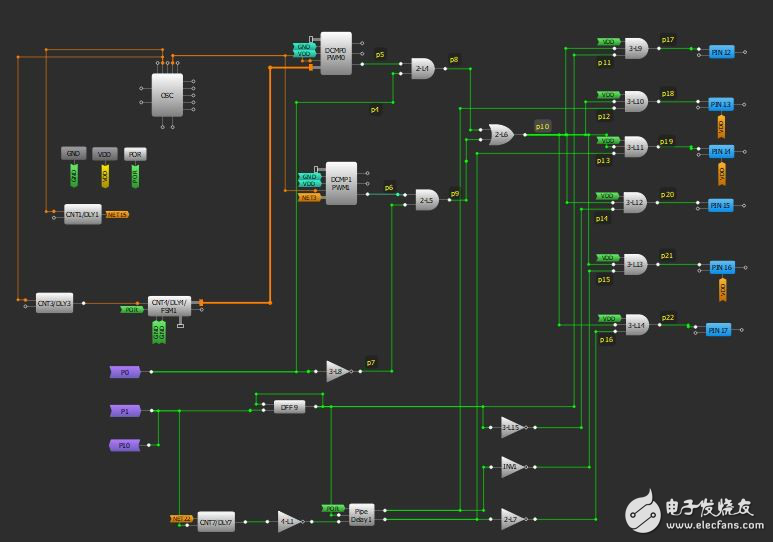
图7:设计矩阵1
逆变器输出电压的基频选择为50 Hz。选择SLG46220是因为它提供了足够的资源来执行预期的设计。矩阵0和1设计分别如图6和图7所示。在矩阵0中,通过以级联(concatenated)方式连接DFF,并在反馈环路中使用异或门生成伪随机信号(PBRS)P0,如图6所示。DFF由来自振荡器模块OUT0的12.5kHz时钟信号驱动。
对于锯齿载波信号的生成,建议使用FSM块。在UP = 0的设定模式下配置的FSM0和FSM1分别由计数器CNT1/DLY1和CNT3/DLY3馈送,生成频率为1.6875MHz的脉冲。两个FSM中的计数器值设置为134(输出周期80 us),以实现所需的12.5 kHz分立锯齿信号。为了在两个锯齿信号之间实现180 °C相移,在FSM1使用由CNT9/DLY9馈送的管道延迟40μs后,启用FSM0。
两个锯齿波载波信号通过FSM0和FSM1的Q字节输出端口馈入DCMP0和DCMP1,与恒定参考信号(在寄存器DCMP0和DCMP1内配置)进行比较,如图7所示。由于计数器运行达到值134,参考值相对于134给出,例如67等于0.5(67/134)的值。两个DCMP(p5和p6)的输出进一步与来自LFSR(p4)的输出信号及其反相值(p7)一起传递到两个AND门。向或门馈入这些AND门的输出,以随机获得DCMP的两个输出之一。或门的输出(p10)还进一步用于调制逆变器的驱动信号。
计数器CNT0 / DLY0被配置为生成周期为10ms的脉冲,以便生成50Hz频率(基波)的输出电压。这些脉冲被馈送到以反相模式配置的DFF,输出反馈到输入,以生成50Hz方波脉冲序列。为确保标记为p11至p16的输出脉冲相位相差60 °C,建议使用管道延迟模块。将计数器CNT5/DLY5、CNT6/DLY6和CNT7/DLY7级联以提供周期为3.33ms的脉冲。这些脉冲通过非门馈入管道延迟,因为管道延迟通过计算输入上升沿的数量产生延迟,而计数器通过复位输入复位为0,生成重复的下降沿,周期为3.33 ms。输出0和1的管道延迟分别为输入脉冲提供3.33 ms和6.66 ms的时间延迟。三个信号,即管道延迟的输入和两个延迟输出,被进一步反相,以提供彼此相移60°的共6个脉冲(p11-p16)。这些50 Hz、60?C相移脉冲与随机脉冲序列(p10)一起进一步被传递到AND门,为3相逆变器提供最终驱动信号。
实验结果
我们开发了图8中描绘的硬件原型,以实验验证所提出的RPWM方案。为确保同一支路中的两个开关不会同时打开,我们在硬件中生成了一个死区。
图8:原型硬件

图9:放大的相间输出电压波形

图10:参考值为0.8的Vab、Vac和FFT

图11:参考值为0.5的Vab、Vac和FFT
图9显示了输出相间电压的放大波形。很明显,波形是根据需要随机调制的。
在图10中,显示了输出相间电压信号Vab(黄色)和Vac(蓝色)。此外,还显示了参考值≈0.8(107/134)的Vab(红色)的FFT图。尽管频谱中的扩展是明显的,但是如理论所示,观察到两倍于开关频率的尖峰,即25kHz。
图11显示了参考值= 0.5(67/134)时的输出相间电压信号Vab(黄色)和Vac(蓝色)以及Vab(红色)的FFT图。可以看到频谱变得更平坦,而且实现了显著的扩散。
总结
可以使用不同的技术生成用于三相逆变器的RPWM信号,通常在工业应用中使用较贵的DSP和FPGA来实现期望的结果。在本应用笔记中,我们介绍了使用低成本Dialog SLG46620 CMIC实现针对三相逆变器应用的RPWM生成技术。通过恰当的模拟和实验结果,已经确定所提出的技术是有效的,SLG46620 IC提供了足够的资源来实现预期的结果。
-
电机控制
+关注
关注
3526文章
1855浏览量
268342 -
HRPWM
+关注
关注
0文章
3浏览量
3184
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论