 四轴PID算法:单环和串级,你搞懂了吗?
四轴PID算法:单环和串级,你搞懂了吗?
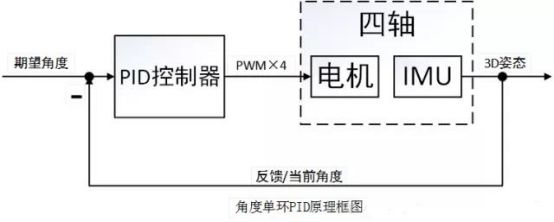
这里主要讲解的PID算法属于一种线性控制器,这种控制器被广泛应用于四轴上。要控制四轴,显而易见的是控制它的角度,那么最简单,同时也是最容易想到的一种控制策略就是角度单环PID控制器,系统框图如图所示:
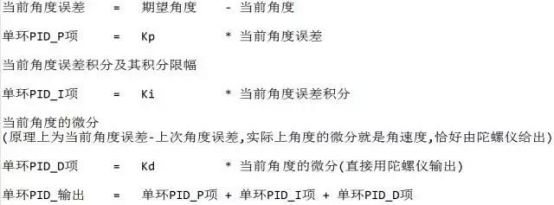
或许有些朋友看得懂框图,但是编程实现有一定困难,在这里笔者给出了伪代码:
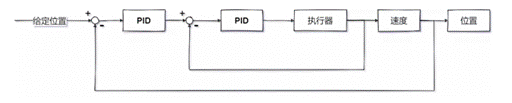
上述角度单环PID控制算法仅仅考虑了飞行器的角度信息,如果想增加飞行器的稳定性(增加阻尼)并提高它的控制品质,我们可以进一步的控制它的角速度,于是角度/角速度-串级PID控制算法应运而生。在这里,相信大多数朋友已经初步了解了角度单环PID的原理,但是依旧无法理解串级PID究竟有什么不同。
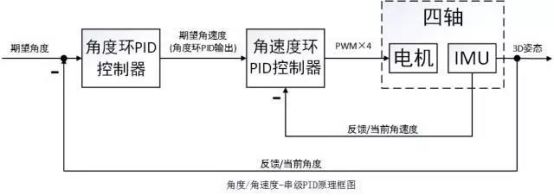
其实很简单:它就是两个PID控制算法,只不过把他们串起来了(更精确的说是套起来)。那这么做有什么用?答案是,它增强了系统的抗干扰性(也就是增强稳定性),因为有两个控制器控制飞行器,它会比单个控制器控制更多的变量,使得飞行器的适应能力更强。为了更为清晰的讲解串级PID,这里笔者依旧画出串级PID的原理框图,如图所示
同样,为了帮助一些朋友编程实现,给出串级PID伪代码:
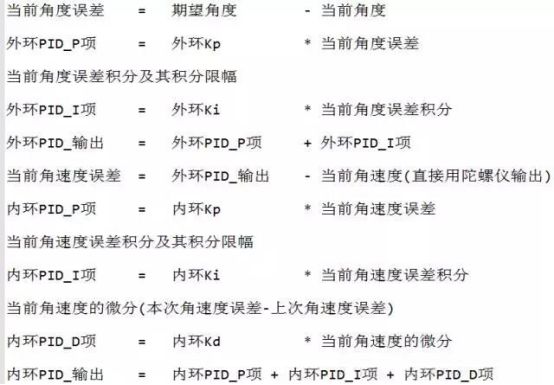
而笔者在整定串级PID时的经验则是:先整定内环PID,再整定外环P。
内环P:从小到大,拉动四轴越来越困难,越来越感觉到四轴在抵抗你的拉动;到比较大的数值时,四轴自己会高频震动,肉眼可见,此时拉扯它,它会快速的振荡几下,过几秒钟后稳定;继续增大,不用加人为干扰,自己发散翻机。
特别注意:只有内环P的时候,四轴会缓慢的往一个方向下掉,这属于正常现象。这就是系统角速度静差。
内环I:前述PID原理可以看出,积分只是用来消除静差,因此积分项系数个人觉得没必要弄的很大,因为这样做会降低系统稳定性。从小到大,四轴会定在一个位置不动,不再往下掉;继续增加I的值,四轴会不稳定,拉扯一下会自己发散。
特别注意:增加I的值,四轴的定角度能力很强,拉动他比较困难,似乎像是在钉钉子一样,但是一旦有强干扰,它就会发散。这是由于积分项太大,拉动一下积分速度快,给 的补偿非常大,因此很难拉动,给人一种很稳定的错觉。
内环D:这里的微分项D为标准的PID原理下的微分项,即本次误差-上次误差。在角速度环中的微分就是角加速度,原本四轴的震动就比较强烈,引起陀螺的值变化较大,此时做微分就更容易引入噪声。因此一般在这里可以适当做一些滑动滤波或者IIR滤波。从小到大,飞机的性能没有多大改变,只是回中的时候更加平稳;继续增加D的值,可以肉眼看到四轴在平衡位置高频震动(或者听到电机发出滋滋的声音)。
前述已经说明D项属于辅助性项,因此如果机架的震动较大,D项可以忽略不加。
外环P:当内环PID全部整定完成后,飞机已经可以稳定在某一位置而不动了。此时内环P,从小到大,可以明显看到飞机从倾斜位置慢慢回中,用手拉扯它然后放手,它会慢速回中,达到平衡位置;继续增大P的值,用遥控器给不同的角度给定,可以看到飞机跟踪的速度和响应越来越快;继续增加P的值,飞机变得十分敏感,机动性能越来越强,有发散的趋势。
如何做到垂直起飞、四轴飞行时为何会飘、如何做到脱控?
这三个问题一眼看上去是三个不同的问题,其实就原理上讲,他们的原因在绝大多数情况下都是由于加速度计引起的。如果飞机可以垂直起飞,说明你的加速度计放置地很水平,同时也说明你的PID控制算法参数找的不错,既然可以垂直起飞,那么飞行过程中,只要无风,四轴几乎就不会飘,自然而然就可以脱控飞行。由此可见,加速度计是个十分重要的器件。
在姿态解算中,或者说在惯性导航中,依靠的一个重要器件就是惯性器件,包括了加速度计和陀螺仪。陀螺仪的特性就是高频特性好,可以测量高速的旋转运动;而加速度计的低频特性好,可以测量低速的静态加速度。无论是何种算法(互补滤波、梯度下降、甚至是Kalman滤波器),都离不开对当地重力加速度g的测量和分析。
惯性导航利用的就是静态性能好的加速度计去补偿动态性能好的陀螺仪漂移特性,得到不飘并且高速的姿态跟踪算法,因此基于惯性器件的姿态解算,加速度计是老大,它说了算。
下面,我给大伙推理一下四轴如何平稳飞信的思路,欢迎各位批评指出:
首先,为了让四轴平稳的悬停或飞行在半空中,四个电机必须提供准确的力矩->假设力矩与电机PWM输出呈线性关系,也就是必须提供准确的4路PWM->4路PWM由遥控器输入(期望角度)、PID算法及其参数和姿态解算输出(当前角度)组成,假设遥控器输入不变(类似脱控)、PID算法及其参数也较为准确(PID参数无需十分精确,但只要在某个合理的范围内,控制品质差不了多少),也就是姿态解算的输出必须是十分准确的,可以真实反应飞行器的实际角度->姿态解算的结果由加速度计和陀螺仪给出,根据前述惯性导航的描述,加速度计补偿陀螺仪,因此要得到精确的姿态解算结果,务必要求加速度输出精确的重力加速度g->这里仅讨论悬停飞行,因此忽略掉额外的线性加速度(事实证明,在四轴强机动飞行过程中,线性加速度必须要考虑并消除),假设加速度计输出重力加速度g,这个重力加速度g必须十分“精确”。
总结一下:精准力矩->精准PWM->精准姿态->加速度计输出“精确”重力加速度g。
这里的“精确”打了引号,意思不是说加速度的性能十分好,要输出精确的当地加速度g,而是说它能够准确反应机架的角度。为了达到悬停、平稳的飞行效果,控制算法输出的PWM会让加速度计输出的重力加速度g在XOY平面内的分量就可能少,也就是说:PID控制算法控制的不是机架水平,而是加速度计水平,PID不知道机架是什么东西,它只认加速度计。
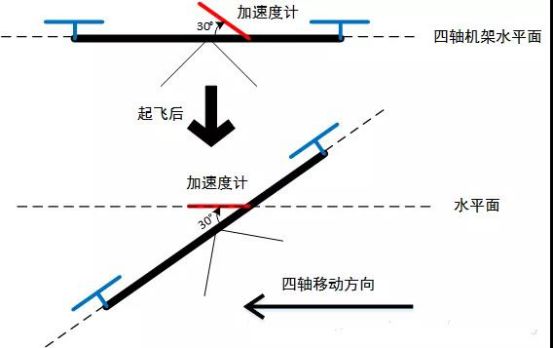
上图中,加速度计(红线)与四轴机架的水平面(虚线)呈30°。起飞后,PID控制算法会尝试将加速度计调整至水平位置,因此四轴就会往图中左边飘,倾斜角度也为30°。这就是为什么飞机无法垂直起飞,或者飞行过程中往一个方向飘的原因:加速度计和机架没有水平。因此在加速度计的机械安装时,尽量保证加速度计与机架水平。如果有些朋友已经将加速度计固定在飞控板上,可以通过遥控器的通道微调功能设置悬停时的期望角度,软件上校正这种机械不水平。
除了上述讨论的加速度计安装水平问题,也需要对加速度计进行零偏置校正,具体的方法叫做6位置标定法:即将加速度计沿着6个方向放置,分别记录重力加速度计g在6个方向上的最大输出值,然后取平均,得到圆球的中心点(这里假设g投影为球,实际上为椭球,需要进行最小二乘法拟合求三轴标定系数)。
最后提一点,如果加速度计和遥控器均做了调整,飞机可以做到垂直起飞,并且飞行效果还行,但是飞机的回中速度较慢,感觉就像是在抬轿子一样。具体描述:悬停时,猛往一个方向打摇杆后立即放手,飞机会往摇杆方向走很远才停下。这是因为飞机过于稳定,也就是内环的作用过强或者外环作用过弱导致,解决方法是降低内环P或者加大外环P。
-
PID
+关注
关注
35文章
1472浏览量
85598 -
四轴飞行器
+关注
关注
55文章
206浏览量
51162
原文标题:四轴PID算法:单环和串级,你搞懂了吗?
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐


四轴PID算法:单环和串级,你搞懂了吗?






 工商网监
工商网监
评论