 史上最严!智能车测试迎来最新欧盟标准
史上最严!智能车测试迎来最新欧盟标准
随着人工智能和车联网技术的进步,被公认为最严格的测试法规——欧盟测试EURO-NCAP——也开始意识到,将自动驾驶分割成一个个单独的功能来进行评价已经越来越困难,现阶段需要探寻“基于场景”的自动驾驶评价方法,以此为消费者提供更好的评价指标和参考结果。
随着科技的发展和生态文明建设的推进,大众对机动化出行的需要,正由追求拥有汽车转向追求社会化、绿色化、智能化的共享出行服务。对汽车的电动化、智能化、共享化提出了更高的要求,这必将带来一场深刻的汽车革命,汽车智能化的发展是科学进步的必然趋势。
据普华永道预测,智能汽车市值将在2025年前达到420亿美元,数字庞大的智能车驶入交通势必会引发公众对车辆行驶安全的新思考,全面、可靠的智能车测试技术变得尤为重要。
智能驾驶汽车的测试较传统汽车发生了本质的变化,这主要体现在测试评价内容、评价工况以及评价工具链的变化等。在传统汽车以被动安全为主的时代,最能考验汽车安全性的测试是新车碰撞测试(NCAP),欧洲(Euro-NCAP)、中国(C-NACP)等都有成熟的相关法规,定期对本国生产及进口新车进行正面碰撞、侧面碰撞安全性试验,以检查汽车内驾驶员及乘客在碰撞时所受伤害程度。然而随着ADAS技术以及自动驾驶汽车的引入,车辆测试不再局限于单一功能下的测试,而转向基于场景的测试。
6月4日,由上海测迅汽车科技有限公司主办的第二届智能汽车测试技术研讨会在上海安亭举行。来自江苏省智能网联汽车创新中心、吉林大学、上海机动车检测认证技术研究中心有限公司、中国汽车工程研究院股份有限公司、Mobileye、GeneSys、4activeSystems、Stähle、Carhs、德国肯普滕应用技术大学、上海测迅汽车科技有限公司的十三位讲师,分别围绕最新EuroNCAP标准、国际先进测试技术与工具、L3/L4级智能驾驶技术研究等内容作会议报告,两百余位专注智能汽车测试研究的嘉宾出席会议。
关于自动驾驶汽车的测试,江苏省智能网联汽车创新中心戴一凡博士认为多样化的交通场景将成为自动驾驶测试中的核心要素,而在场景库构建上,需要综合考虑道路、交通设施、气象条件、交通参与物等外部状态以及自车的驾驶任务和状态等。同时,场景的数据源既需要以路侧监控系统、车载采集系统和事故数据为主的真实数据,还要有以标准规范场景、人为构造场景、驾驶模拟器场景为主的虚拟数据。
随着人工智能和车联网技术的进步,被公认为最严格的测试法规——欧盟测试EURO-NCAP——也开始意识到,将自动驾驶分割成一个个单独的功能来进行评价已经越来越困难,现阶段需要探寻“基于场景”的自动驾驶评价方法,以此为消费者提供更好的评价指标和参考结果。2018年Euro NCAP的规范中,一些车辆标配的ADAS功能(ABS、EBD、ESC)都已经不再作为加分项,AEB-City、AEB-Vulnerable Road User、AEB-Inter-Urban、ELK(Emergency Lane Keeping)、LDW(Lane Departure Warning)等才作为加分项出现。
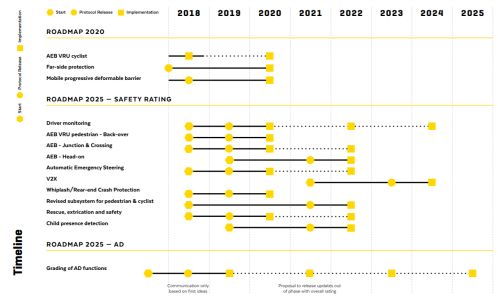
最新的Euro NCAP测试法规是怎样的?GeneSys Electronik GmbH总裁Dr. Bertold Huber向参会嘉宾分析了最新的Euro NCAP规划,据下图显示,驾驶员监测(Driver Monitoring)、部分自动紧急制动系统(AEB)、自动紧急转向(Automatic Emergency Steering)、尾部碰撞保护(Whiplash/Rear-end Crash Protection)、行人/自行车更新版本子系统(Revised subsystem for pedestrian & cyclist)等已开始筹备,车联网V2X要2021年开始,2024年才会真正实施。
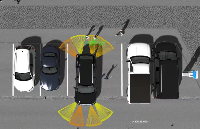
作为本次智能汽车测试研讨会的主办方,上海测迅汽车科技有限公司现场演示了面向Euro-NCAP 2020的ADAS测试方案。
本次技术演示主要分为两大部分:1.Euro-NCAP v301行人工况演示;2.LSS高速工况以及前车制动试验(CCRb)工况演示。
EURO-NACP v301行人工况演示将在2020年正式实行,现场使用4activeSB 假人系统、GeneSys ADMA系列高精度GPS组合惯导系统(用于车辆定位、航向角、横摆角等车身姿态的高精度数据记录和采集)、STAHLE 驾驶机器人共同构建了这一场景,具有很强的前瞻性。
同样使用了4activeSB system 、GeneSys ADMA系列、STAHLE 驾驶机器人构建并测试了LSS高速工况,以及前车制动试验(CCRb)工况。上海测迅为在测试流程中配备的世界顶级系统开发商设备让场景搭建更快速便捷,为测试的全面部署节约了大量的宝贵时间。
智能车测试技术正紧紧围绕汽车智能化变革、人性化需求做着一系列的改变,我们有理由相信,未来智能车时代会比传统汽车时代有更高的安全保障。然而,要实现更大程度的安全驾驶,就要把握以上最新测试要求和标准趋势,找准智能驾驶汽车正确的发展方向,在此基础上,得益于先进、高效、集成的测试方案和测试工具更快助力智能驾驶产品的真正落地。当前我国智能汽车产业的发展现状相较于国外来说,真正实现落地运营的相对较少,很重要的一部分原因是测试评价体系不够完善,企业对测试系统和方案的可选择性太少,以测试结果回馈促进智能驾驶研发。上海测迅汽车科技有限公司能够依托本地化资源优势,为国内外车企尤其是国内企业提供示范集成式的测试评价支持,以先进高效的测试评价工具助力解决当前自动驾驶领域的最大也是最实际的难题——智能驾驶汽车产品落地。
-
智能车
+关注
关注
21文章
404浏览量
76983 -
大众
+关注
关注
1文章
784浏览量
34057
原文标题:智能车测试迎来最新欧盟标准,高效测试工具助力产品落地
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐


复杂环境下多无人智能车辆协同调控
设计仿真 | 基于VTD的智能大灯仿真测试方案
泰州创达接线盒荣获IEC TS 63126:2020标准加严测试认证证书
20.0-电磁杆的组装和实物介绍“这个是就是你想要的“-智能车电磁组 电磁循迹小车
20.3-使用两个通道进行电磁循迹 智能车竞赛 电磁杆原理图 电磁循迹小车 STM32电磁小车 电磁循迹算法

20.2-电磁杆在磁轨道的测试 零基础入门智能车竞赛 STM32电磁小车

什么是智能车间和智能工厂 它们有什么区别
欧盟设立人工智能风险监控部门
仿真测试与实车测试的区别
小米之后,做手机的魅族也造车了 搭载FlymeAuto智能车机系统
黑芝麻智能与一汽红旗达成武当系列C1200家族智能车控项目合作

蓉矽半导体SiC MOSFET通过AEC-Q101车规级考核和HV-H3TRB加严可靠性验证

ROS系统的智能车开发-基于米尔芯驰MYD-JD9X开发板






 工商网监
工商网监
评论