 基于STM32四轴飞行器参考电路设计
基于STM32四轴飞行器参考电路设计

四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。
四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。
系统方案本设计采用STM32F4作为核心处理器,该处理器内核架构 ARM Cortex-M4,具有高性能、低成本、低功耗等特点。
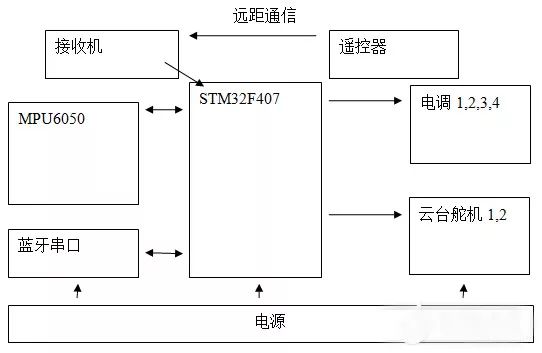
主控板包括传感器MPU6050电路模块、无线蓝牙模块、电机启动模块,电源管理模块等;遥控使用商品遥控及接收机。控制芯片捕获接收机的PPM命令信号,传感器与控制芯片之间采用IIC总线连接,MCU与电调之间用PWM传递控制信号。
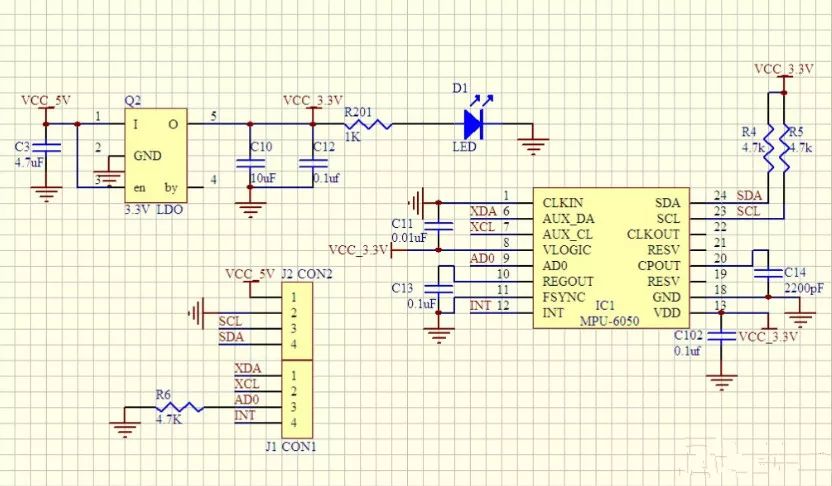
MPU-6050电路原理图
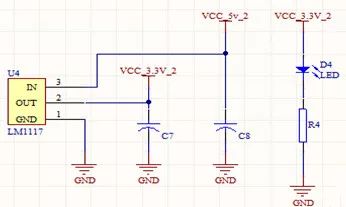
电源管理模块四轴飞行器要求整体设计质量较轻,体积较小,因此在电池的选取方面,采用体积小、质量轻、容量大的锂电池供电最合适。系统的核心芯片为STM32F103,常用工作电压为3.3V,同时惯性测量传感器,蓝牙通信模块的常规供电电压也为3.3V,锂电池的电压为11.4V,要使系统正常工作,需要将11.4V的锂电池电压稳压到3.3V。常用的78系列稳压芯片已不再适用,必须选择性能更好的稳压芯片。
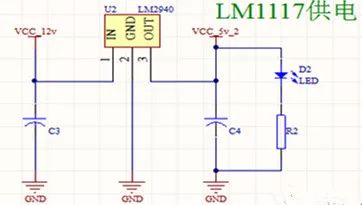
经综合考虑,本电路采用LM1117-3.3和LM2940-5电源部分的核心芯片。电池电源经过LM2940-5降到5V后在输入LM1117-3.3稳压为3.3V。由于电机部分电流较大,故在飞控电路部分加入了过流保护,使用500mA的保险丝。
本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理等系统组成。其具有灵活轻盈,延展性,适应性强好等特点。在实际应用方面,四轴飞行器可以在复杂、危险的环境下可以完成特定的飞行任务,也可以用于监控交通,环境等。
-
STM32
+关注
关注
2312文章
11189浏览量
374520 -
四轴飞行器
+关注
关注
55文章
207浏览量
52807
原文标题:基于STM32四轴飞行器参考电路设计
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
分布式推进垂直起降飞行器过渡走廊参数敏感性分析与总体设计优化导向研究

震有科技联合发布首款168桨智能飞行器
芯片电感/半导体模组磁性元器件在低空飞行器领域的应用范围及其作用
低空飞行器(如eVTOL、物流无人机、城市空中交通飞行器)的适航认证

浙江锋锂低空飞行器电池解决方案亮相2025亚洲通用航空展
第四届飞行器健康管理技术国际高端论坛暨青年科学家论坛:昊衡科技,欢迎您来!


深圳反重力科技纯电动单人智能飞行器完成首次试飞
30%空间压缩奇迹:组合泵如何重塑飞行器动力系统布局逻辑

为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

eVTOL低空飞行器电机为什么要用自粘结铁芯方案?
小马哥STM32F1主控720空心杯四轴飞行器资料(包含源代码和相关教程)
小型飞行器专用 AS-DR01模拟信号AI识别跟踪模块




评论