 用于3D摄像头的VCSEL技术
用于3D摄像头的VCSEL技术
传感器技术编辑整理
传统的光电转换技术一般采用LED等发光器件。这种发光器件多采用边缘发射,体积大,因此比较难以和半导体技术结合。20世纪90年代垂直腔表面发射激光VCSEL技术成熟后,解决了发光器件和半导体技术结合的问题,因此迅速得到普及。
晶圆光学镜片中间的两面发射垂直腔面发射体激光器(VCSEL)
近年来,智能手机领域相关技术更新迭代十分迅速,由于人们的日常需求逐渐提高,手机的拍照,感应,识别等功能尤其受到关注,故手机摄像头用量提升的趋势仍处于加速态势,特别是3D摄像头等新创新的使用也将为手机摄像头领域提供增益,尤其以VCSEL激光器为核心关键元器件的3D Sensing摄像头在手机上的应用,带动相关市场迎来一轮爆发。
3D Sensing摄像头
3D Sensing摄像头相比于传统摄像头除了能够获取平面图像以外,还可以获得拍摄对象的深度信息,即三维的位置及尺寸信息,其通常由多个摄像头+深度传感器组成。3D 摄像头实现实时三维信息采集,为消费电子终端加上了物体感知功能,从而引入多个“痛点型应用场景”,包括人机交互、人脸识别、三维建模、安防和辅助驾驶等多个领域,3D Sensing摄像头让交互方式从平面变成了立体。而3D Sensing摄像头产业链与传统摄像头产业链相比主要新增加红外光源+光学组件+红外传感器等部分,其中最关键的部分就是红外光源。
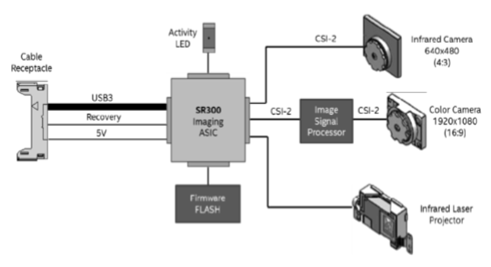
因特尔公司研发的RealSense 3D摄像头架构
目前,可以提供800-1000nm波段的近红外光源主要有三种:红外LED、红外LD-EEL(边发射激光二极管)和VCSEL(垂直腔面发射激光器)。早期3D传感系统一般都使用LED作为红外光源,但是随着VCSEL技术的成熟,性价比已经接近红外LED,除此之外,在技术方面,由于LED不具有谐振腔,导致光束更加发散,在耦合性方面很差,而VCSEL在精确度、小型化、低功耗、可靠性全方面占优的情况下,现在常见的3D摄像头系统一般都采用VCSEL作为红外光源。而与传统边发射激光器相比,VCSEL 在光束质量、与光纤耦合效率、腔面反射率上都具有较大优势,且因为VCSEL发射光线垂直于衬底而边发射激光器发射光线平行于衬底,因此 VCSEL 能够实现二维阵列而边发射激光器不行。
VCSEL技术
垂直腔面发射激光器(Vertical-Cavity Surface-Emitting Laser,简称VCSEL,又译垂直共振腔面射型雷射)是一种半导体,其激光垂直于顶面射出,与一般用切开的独立芯片制成,激光由边缘射出的边射型激光有所不同。
VCSEL是很有发展前景的新型光电器件,也是光通信中革命性的光发射器件。顾名思义,边发射激光器是沿平行于衬底表面、垂直于解理面的方向出射,而面发射激光器其出光方向垂直于衬底表面,如下图:
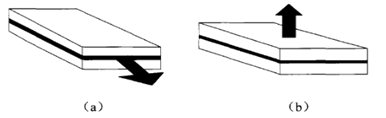
边发射激光器(a)与面发射激光器(b)示意图
它优于边发射激光器的表现在于:易于实现二维平面和光电集成;圆形光束易于实现与光纤的有效耦合;可以实现高速调制,能够应用于长距离、高速率的光纤通信系统;有源区尺寸极小,可实现高封装密度和低阈值电流;芯片生长后无须解理,封装后即可进行在片实验;在很宽的温度和电流范围内都以单纵模工作;价格低。
VCSEL的优异性能已引起广泛关注,成为国际上研究的热点。这十多年来,VCSEL在结构、材料、波长和应用领域都得到飞速发展,部分产品已进入市场。
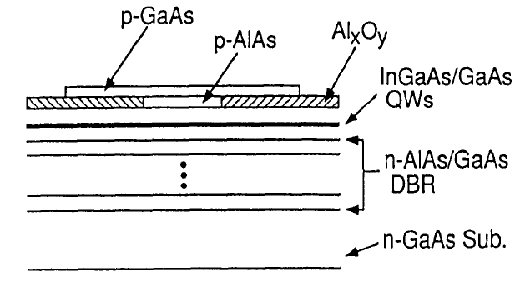
VCSEL基本结构
VCSEL的结构示意图如下图所示。它是在由高、低折射率介质材料交替生长成的分布布喇格反射器(DBR)之间连续生长单个或多个量子阱有源区所构成。典型的量子阱数目为3~5个,它们被置于驻波场的最大处附近,以便获得最大的受激辐射效率而进入振荡场。在底部还镀有金属层以加强下面DBR的光反馈作用,激光束从顶部透明窗口输出。
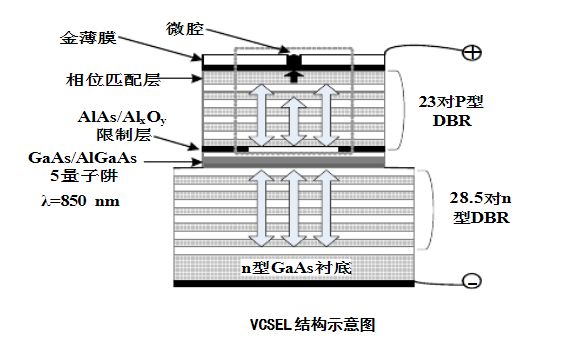
实际上,要完成低阈值电流工作,和一般的条型半导体激光器一样,必须使用很强的电流收敛结构,同时进行光约束和截流子约束。由上图可见,VCSEL的半导体多层模反射镜DBR是由GaAs/AlAs构成的,经蚀刻使之成为air-post(台面)结构。在高温水蒸汽中将AlAs层氧化,变为有绝缘性的AlxOy层,其折射率也大大降低,因而成为把光、载流子限制在垂直方向的结构。对VCSEL的设计集中在高反射率、低损耗的DBR和有源区在腔内的位置。
VCSEL激光器的特点
由于VCSEL与边发射激光器有着不同的结构,这就决定了两者之间有不同的特点和性能,下表中列出了两种激光器的基本参数。
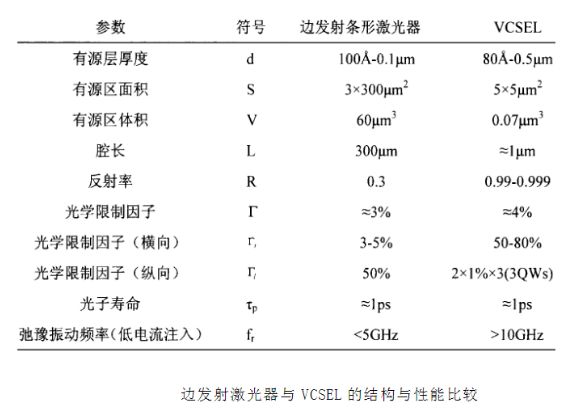
从表中我们可以看出,VCSEL有源区的体积小、腔短,这就决定了它容易实现单纵模、低阈值(亚毫安级)电流工作,但是为了得到足够高的增益,其腔镜的反射率必须达到99%。VCSEL具有较高的弛豫振荡频率,从而在高速数据传输以及光通信中,预计将有着广泛的应用。VCSEL出光方向与衬底表面垂直,可以实现很好的横向光场限制,进行整片测试,得到圆形光束,易与制作二维阵列,外延晶片可以在整个工艺完成前,节约了生产成本。
VCSEL的优点主要有:
l.出射光束为圆形,发散角小,很容易与光纤及其他光学元件耦合且效率高。
2.可以实现高速调制,能够应用于长距离、高速率的光纤通信系统。
3.有源区体积小,容易实现单纵模、低阈值的工作。
4.电光转换效率可大于50%,可期待得到较长的器件寿命。 5.容易实现二维阵列,应用于平行光学逻辑处理系统,实现高速、大容量数据处理,并可应用于高功率器件。
6.器件在封装前就可以对芯片进行检测,进行产品筛选,极大降低了产品的成本。
VCSEL的发展史
VCSEL的历史,也是在诸多学者机构的努力下,其性能不断优化的历史,在这几十年的历史中,IGA及其带领的团队起到了不可磨灭的作用,可以堪称IGA教授为VCSEL之父。
随着VCSEL的诸多优点,其应用也越来越广泛。并且为了适合这些应用,VCSEL也朝着多个方向在各自发展,如图所示,为其主要应用:
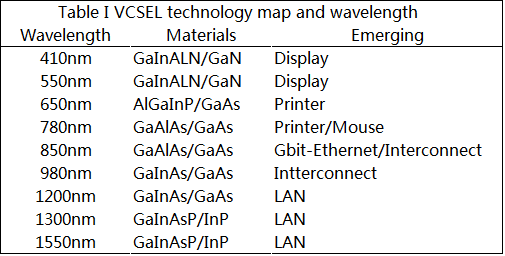
不同波长VCSEL应用领域
由于目前VCSEL最主要应用在光传输方面,基于1979年Soda等人的VCSEL为开端,VCSEL的发展,主要经历了2个阶段:
第一阶段:从VCSEL诞生到20世纪末,蛮荒发展阶段。
在这个阶段,各个组织机构都提出以及尝试了各种不同结构类型的VCSEL,最终氧化物限制型VCSEL由于其诸多优点而胜出。
1994年,Huffaker等人率先采用在台面结构(Mesa)下本征氧化AlGaAs,生成掩埋高阻层Al氧化物的方式,来对电流进行进一步的限制。利用这种结构,阈值电流可以降低到225uA。而这种结构就是目前普遍采用的氧化物限制型(Oxide-confined)结构的原型;
首个氧化物限制型VCSEL
2013年,Iga对VCSEL的关键指标如阈值电流、调制带宽与有源区的关系给出了简单的关系公式。
VCSEL的阈值电流同其他半导体激光器一样,与有源区体积有如下关系式:

由公式可以看出,为了降低阈值电流,就需要不断减小有源区体积。比较当前的VCSEL与条状激光器的有源区体积,可以发现,VCSEL的V=0.06um3, 条状激光器依然在V=60um3, 这就是为什么条状激光器的阈值电流典型值仍旧在几十mA的级别,而VCSEL的阈值电流已经达到了亚毫安级别。
第二阶段:逐渐发展成熟阶段及优化阶段。
由于氧化物限制型的VCSEL具有低阈值电流等很多优点,这种结构的VCSEL被很快运用到了光通信中。
由于高的工作电流可以带来更好的调制特性,但同时也会相应的增加功耗,进而带来温度的上升,会对可靠性带来影响。调制速率与功耗成了VCSEL在光传输领域中重要的挑战。2007年,Y-C.Chang等人采取增加深氧化层层数到5层以及增加p型掺杂浓度来降低串联阻抗的方式,在0.9mA电流下实现的15GHz调制带宽,相应的功耗只有1.2mW,带宽/功耗比只有12.5GHz/mW,是当时最先进水平。VCSEL截面结构如图所示:
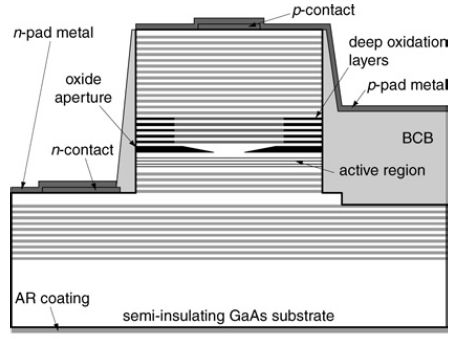
深氧化层氧化物限制型VCSEL
利用相同的VCSEL结构,同年,Y-C.Chang等人又实现了35Gbps的无误码传输。
2011年,Petter Westbergh等人研究了850nm氧化物限制型VCSEL光子寿命与谐振频率及调制速率的关系,并指出在高谐振频率以及低阻尼震荡中取得一个折衷来提高速率:当光子寿命接近3ps时,可以使VCSEL的调制带宽达到23GHz,同时可以得到40Gb/s的无误码传输。
近年来,各个兴趣小组对于高速率、低功耗的VCSEL研究依然兴趣不减,图10是截止到2015年,各机构的研究成果。可以看出,如果采用预加重的方式,目前VCSEL背靠背传输可以达到71Gbit/s。
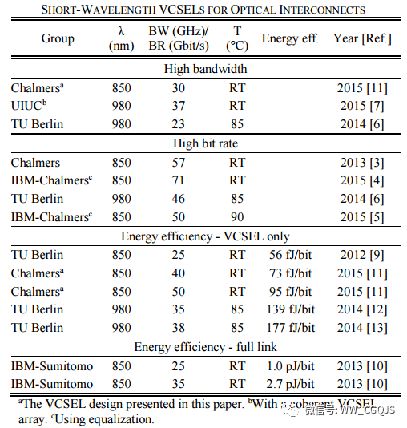
短波长VCSEL光互联领域发展近况
VCSEL在手机AR功能与投影领域的应用
AR即增强现实技术,它是一种将真实世界信息和虚拟世界信息“无缝”集成的新技术,是把原本在现实世界的一定时间空间范围内很难体验到的实体信息(视觉信息,声音,味道,触觉等),通过电脑等科学技术,模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验。而AR最核心技术在于光学,尤其是激光技术,无论是手势识别、三维重构还是成像,光学技术都是决定性基础。除了3D摄像模块,最关键的就是光学成像模块。例如微软公司的HoloLens 配备两块光导透明全息透镜,虚拟内容采用 LCoS(硅基液晶)投影技术,从前方微型投影仪投射至光导透镜后进入人眼。
Hololens AR眼镜的LCoS微型投影仪
LCOS(液晶覆硅技术)是小型化 AR 头显的关键技术之一。三片式的 LCOS 成像系统,首先将投影光源发出的白色光线,通过分光系统系统分成红绿蓝三原色的光线,然后,每一个原色光线照射到一块反射式的LCOS芯片上,系统通过控制 LCOS 面板上液晶分子的状态来改变该块芯片每个像素点反射光线的强弱,最后经过LCOS反射的光线通过必要的光学折射汇聚成一束光线,经过投影机镜头照射到屏幕上,形成彩色的图像。目前在投影光源上主要有LED和激光两种方案,由于激光在光束质量、亮度、功耗和使用寿命上无可比拟的优越性,将是未来的发展方向。
以色列Lumus的AR眼镜也采用了微型投影技术,成像关键部件由微型投影仪、光导元件(LOE)和反射波导组成。植入眼镜的微型投影仪(例如激光投影)将图像画面进行投放,通过光导元件、反射波导形成全反射。
Lumus AR眼镜也采用了微型投影技术
综上,微投成像和3D摄像将是未来AR产业两大核心技术,以VCSEL为代表的半导体激光器件将成为AR光学技术的最基础部件,引领消费电子光学时代。而随着投影显示技术的发展,人们对投影系统的亮度、解析度、色彩丰富性的要求将会越来越高,光源作为投影系统的重要部件,其发光特性将直接决定投影系统质量。激光光束色度、照度高度均匀,具有亮度高、单色性好、波长固定等传统光源无可比拟的优势,未来取代LED成为微型投影模块、投影仪、投影电视等设备光源将是大概率事件。
目前,激光显示技术主要有三基色纯激光、荧光粉+蓝光、LED+激光混合光源三种技术,对比来看,三基色纯激光优势较为明显。三基色激光被业界视为最正统的激光光源,其具有色域广、光效高、寿命长、功耗低、一致性好、色温亮度可调、稳定、安全可靠免维护、应用灵活等优点。
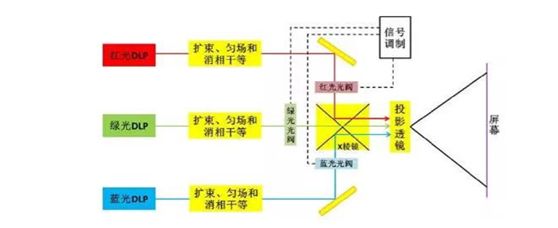
三基色纯激光显示原理示意图
技术进展来看,红光激光二极管技术(包括VCSEL红光阵列)发展已经十分成熟,蓝光激光二极管价格尚高,绿光激光二极管则还有待发展。从已披露专利来看,目前已有“红光VCSEL阵列+蓝光VCSEL阵列+绿色全固体激光器”的解决方案,VCSEL单元用于发出圆化激光光束,经过微透镜阵列准直化后作为R、B光输出。此外,采用VCSEL面阵可以减少VCSEL激光器之间的干涉性,弱化激光散斑,从而提高投影显示质量。
VCSEL在激光雷达领域的应用
日本汽车电子厂家日本电装近期公布了对Trilumina公司的战略投资,该公司主要进行针对雷达设备的高功率VCSEL阵列开发,而这些雷达设备主要面向辅助驾驶和无人驾驶应用。在CES2017上,Trilumina 公司展示了自己基于 VCSEL阵列的256像素3D激光雷达解决方案,如若进展顺利,公司开发的光源模块将高清和远距离传感器功能整合进小尺寸、稳定且具成本效益的包装中,可取代目前应用于自动驾驶汽车示范项目的大尺寸、高成本扫描激光雷达。
激光雷达感应周围车距、三维重建
VCSEL的迅速发展和固有优点已使其成为光电子应用中的关键器件,有强大的生命力。近年来,性能优异的VCSEL不断被研发,主要涉及其低阈值电流,高输出功率,高电光转换效率,低工作电压,高调制带宽和高产额。相信随着VCSEL的不断发展,它将会获得越来越多的潜在应用。
-
传感器
+关注
关注
2550文章
51056浏览量
753270 -
VCSEL
+关注
关注
17文章
264浏览量
30009 -
3D摄像头
+关注
关注
3文章
37浏览量
6730
原文标题:用于3D摄像头的VCSEL技术
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
车载摄像头的EMC问题案例

多光谱火焰检测摄像头

摄像头及红外成像的基本工作原理



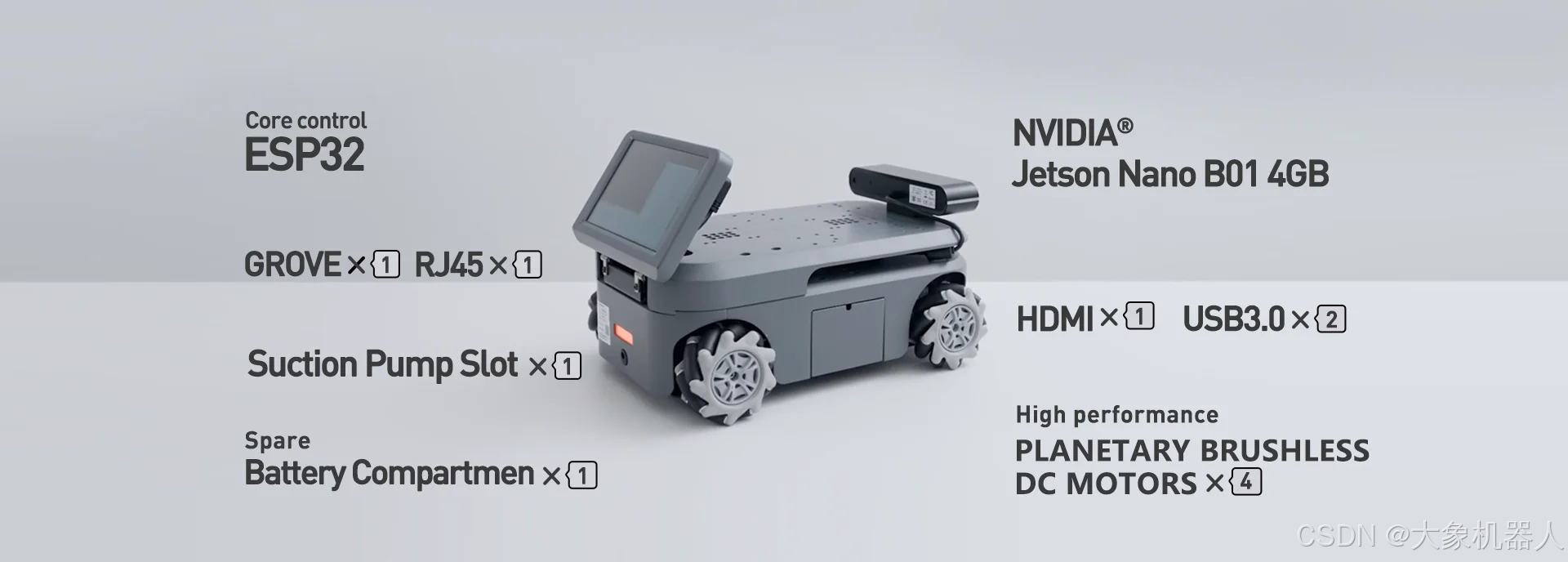
使用myAGV、Jetson Nano主板和3D摄像头,实现了RTAB-Map的三维建图功能!

基于FPGA的摄像头心率检测装置设计
智能摄像头抄表器是什么?

用usb摄像头替换手机前置摄像头可以吗
AHD摄像头与CVBS的区别
两种应用于3D对象检测的点云深度学习方法






 工商网监
工商网监
评论