 麻省理工学院开发了一种更好的机器人预测人类运动的新方法
麻省理工学院开发了一种更好的机器人预测人类运动的新方法
人类和机器人一起工作对工厂和建筑工地等环境有着巨大的潜力,但机器人对人也有着高度的潜在危险,尤其是当机器人体积巨大而功能又很强大的时候,这就是工业机器人的典型情况。
为了使“日冕机器人”成为现实,人们做出了大量的努力,包括德国机器人巨头生产的YuMi这样的生产机器。但麻省理工学院研究人员提出的一种新算法可以帮助人类和机器人在一起工作更加安全。
研究人员与宝马汽车公司合作,观察他们目前的产品流程,在这个过程中他们注意到,机器人在关注工厂中的人类的安全问题时过于谨慎——在人们走到固定地点之前他们会始终保持等待的状态,等待人们跨越他们面前的道路,而这一点会使他们损失大量潜在的生产时间。
针对这种情况,他们现在已经开发出一种新的解决方案,这种机器人在面对任何事物时都会放慢其运作速度,甚至有点像一个人在自己的道路上行走,它们可以继续操作,并在人们落脚点的交通流中移动。这种方式通过提高了机器人在移动时预测人类轨迹的能力,从而大大地节省了他们对不必要的时间的消耗。
研究人员避免了通常的从音乐和语音处理中借来进行算法预测的做法,相反,他们提出了一种“部分轨道”方法,这种方法在预测可预测的旅行路径时效果更好,该方法将实时轨道数据与一个大型的参考文献库相结合。
这是一种更好的预测人类活动轨迹的方法,其中的动作很少有重复的,而且涉及很多停止和启动的操作,即使是在工厂工人重复执行相同的操作上千次也不会有什么疏漏。
研究人员指出,即使是在家里,使用这种方法也能更好地预测人类的运动,例如,在老年人的家庭护理中,使用机器人可能会有好处。这也为该种机器人提供了潜在的消费用户群体。
-
机器视觉
+关注
关注
162文章
4387浏览量
120427 -
人工智能
+关注
关注
1792文章
47399浏览量
238905 -
工业机器人
+关注
关注
91文章
3369浏览量
92725
原文标题:麻省理工学院开发了一种更好的机器人预测人类运动的新方法
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
麻省理工学院研发全新纳米级3D晶体管,突破性能极限
麻省理工学院推出新型机器人训练模型
24M开发出新隔离膜可降低电动汽车电池火灾风险
VILA与其他模型在提供边缘AI 2.0方面的表现
美国佐治亚理工学院一行莅临达实智能调研
麻省理工学院研发RoboGrocery系统,杂货店自动化装袋新篇章
感谢东莞理工学院对我司导热系数测试仪的认可

苏黎世联邦理工学院报告:Rowhammer攻击对高端RISC-V CPU的潜在风险

指南车机器人携同南昌工学院参观南京熊猫电子
一种用于化学和生物材料识别的便携式拉曼光谱解决方案
麻省理工与Adobe新技术DMD提升图像生成速度
霍尼韦尔与南方泵业开展战略合作,四川成都一家红外热成像专用图像处理芯片服务商完成A+轮融资

瑞士苏黎世联邦理工学院新型四足机器人单腿完成开关门、移动任务
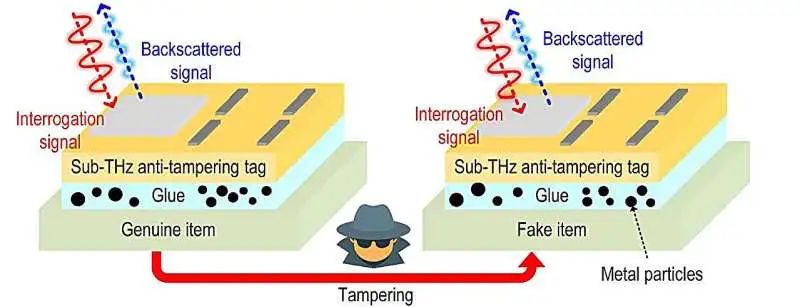
麻省理工学院开发出新的RFID标签防篡改技术
迷思科技获数千万Pre A轮融资,安森美和理想汽车续签长期供货协议





 工商网监
工商网监
评论