 开辟新篇章!谷歌机器学习又有新进展!
开辟新篇章!谷歌机器学习又有新进展!
在谷歌最新的论文中,研究人员提出了“非政策强化学习”算法OPC,它是强化学习的一种变体,它能够评估哪种机器学习模型将产生最好的结果。数据显示,OPC比基线机器学习算法有着显著的提高,更加稳健可靠。
在谷歌AI研究团队一篇新发表的论文《通过非政策分类进行非政策评估》(Off-PolicyEvaluation via Off-Policy Classification)和博客文章中,他们提出了所称的“非政策分类”,即OPC(off-policy classification)。它能够评估AI的表现,通过将评估视为一个分类问题来驱动代理性能。
研究人员认为他们的方法是强化学习的一种变体,它利用奖励来推动软件政策实现与图像输入协同工作这个目标,并扩展到包括基于视觉的机器人抓取在内的任务。
“完全脱离政策强化学习是一种变体。代理完全从旧数据中学习,对于工程师来说这是很有吸引力的,因为它可以在不需要物理机器人的情况下进行模型迭代。”
Robotics at Google(专注机器学的的谷歌新团队)的软件工程师Alexa Irpan写道,“完全脱离政策的RL,可以在先前代理收集的同一固定数据集上训练多个模型,然后选择出最佳的那个模型。”
但是OPC并不像听起来那么容易,正如Irpan在论文中所描述的,非政策性强化学习可以通过机器人进行人工智能模型培训,但不能进行评估。并且在需要评估大量模型的方法中,地面实况评估通常效率太低。
OPC在假设任务状态变化方面几乎没有随机性,同时假设代理在实验结束时用“成功或失败”来解决这个问题。两个假设中第二个假设的二元性质,允许为每个操作分配两个分类标签(“有效”表示成功或“灾难性”表示失败)。
另外,OPC还依赖Q函数(通过Q学习算法学习)来估计行为的未来总回报。代理商选择具有最大预期回报的行动,其绩效通过所选行动的有效频率来衡量(这取决于Q函数如何正确地将行动分类为有效与灾难性),并以分类准确性作为非政策评估分数。
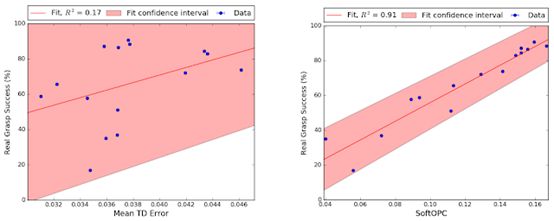
(左图为基线,右图为建议的方法之一,SoftOpC)
谷歌AI团队使用完全非策略强化学习对机器学习策略进行了模拟培训,然后使用从以前的实际数据中列出的非策略分数对其进行评估。
在机器人抓取任务时,他们报告OPC的一种变体SoftOPC在预测最终成功率方面表现最佳。假设有15种模型(其中7种纯粹在模拟中训练)具有不同的稳健性,SoftOPC产生的分数与与真正的抓取成功密切相关,并且相比于基线方法更加稳定可靠。
在未来的研究中,研究人员打算用“噪声”(noisier)和非二进制动力学来探索机器学习任务。“我们认为这个结果有希望应用于许多现实世界的RL问题,”Irpan在论文结尾写道。
-
谷歌
+关注
关注
27文章
6207浏览量
106170 -
机器学习
+关注
关注
66文章
8453浏览量
133166
发布评论请先 登录
相关推荐

魏德米勒开启产业数智转型新篇章
扬帆出海!稳石氢能AEM电解槽出货智利,开启全球商业化新篇章!

摩尔线程与中国移动携手,共筑生态与应用开创数智新篇章
复合机器人:开启智能仓储新篇章

阿里巴巴AI赋能海外扩张新篇章
探索未来智能制造新篇章——富唯智能复合机器人

深开鸿与哈工大重庆研究院合作共同开启智能机器人与协同技术的新篇章

深开鸿与哈工大重庆研究院携手打造智能机器人与协同技术新篇章

华盛昌与易达云成功签署战略协议,共同开启合作新篇章






 工商网监
工商网监
评论