 永磁同步电机如何调速
永磁同步电机如何调速
永磁同步电机,最基本的组成结构定子和转子。定子与异步电机转子类似,由绝缘铜线绕制而成。转子包含永磁体,并具备确定的极数,建立电机的主磁场。
与异步电机相比,永磁同步电机的电、磁和力的关系更简单,经过一定的坐标变换,可以实现电流与力矩的解耦。
1、坐标变换
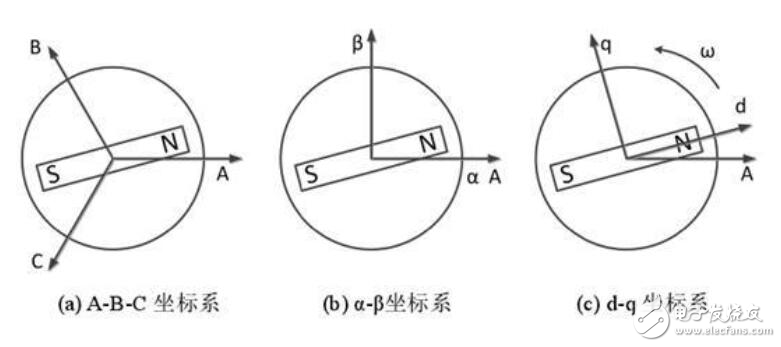
列举,永磁同步电机变频调速用到的相关坐标变换。A-B-C 坐标系,以定子铁芯的圆心为原点,以定子三相绕组为A、B、C三个方向为轴向,轴与轴之间夹角120°。α-β坐标系,与A-B-C坐标系在同一个平面,共享同一个原点,α轴与A轴重合,β轴与α轴成90°角。d-q坐标系,d轴与转子永磁铁磁极N极重合,并跟随转子转动。q轴,与d轴在逆时针方向上成90°角。
2、基频以下调速
磁场定向控制:磁场定向,即在d-q坐标系下,电机参数中,如励磁电流,影响力矩的部分,是参数投影到q轴的分量。而投影到d轴上的部分,则不必考虑,即通常所说的id=0方法。此方法下,电机最大输出转速的决定因素是控制器最高供电电压。磁场定向控制策略的局限在于,不能体现励磁电流影响磁场的部分参数变化,因此不能进行弱磁控制。
3、基频以上调速
直接转矩法,出发点是想要通过控制转矩公式中的参数去直接对转矩输出值产生影响。选择矩角作为控制对象。以内置式转子永磁同步电机为例,说明具体方法。在电源电压和定子磁场频率恒定的情况下,电机实时输出转矩,与矩角的正弦值成正比。
可以在离线状态下,计算每个转矩角对应的电磁转矩值,形成一张矢量表,存放在上位机。在电机控制器运行过程中,实时观测转矩和转矩角,并提取表格中的原始值进行比对。发现与表格的值有出入,则调整电源电压值,进行转矩修正。直接转矩法,鲁棒性好,算法简单,并且不需要坐标变换,在早期是应用较多的一种控制方法。但这种方法在低转速情况下,控制精度急剧下降。因此可以选择仅在基频以下使用。
4、最大力矩电流比控制策略
将电流在d-q坐标系下解耦,再分别求取每个分量的转矩电流最大比,目的是获得确定励磁电流下的最大转矩。
用求取二阶导数的方式确定极大值的存在性。在调速区间内,对转矩电流比求导,二阶导数小于0,则转矩电流比最大值存在。
-
变频调速
+关注
关注
2文章
188浏览量
20555 -
永磁同步电机
+关注
关注
28文章
859浏览量
49489 -
同步电机
+关注
关注
2文章
257浏览量
25267
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论