 简要分析多轴飞行器传感器技术的原理和应用
简要分析多轴飞行器传感器技术的原理和应用
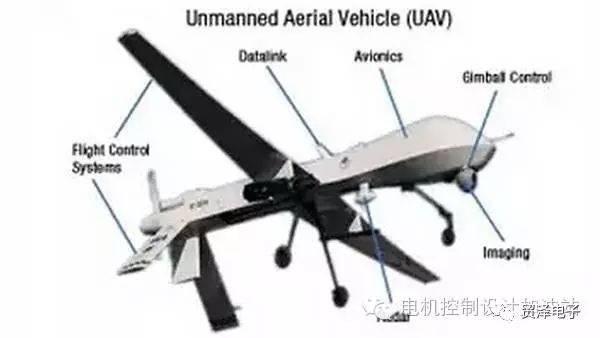
无人飞行器近一年来市场非常火爆,推动了包括MEMS陀螺仪、加速度计的大规模普及应用。《电子工程专辑》主编张迎辉日前撰文《多轴飞行器无人机硬件技术细谈》,文中通过采访ADI亚太区微机电产品市场和应用经理赵延辉,对MEMS传感器在无人飞行器中的产品技术及应用做了深度解读。
ADI的工业级陀螺仪ADXRS652、 ADXRS620、ADXRS623、ADXRS646、ADXRS642等和工业级加速度计ADXL203、 ADXL278等被广泛用于专业级的航拍设备上。而商业级的加速度计ADXL335、ADXL326、 ADXL350、ADXL345等,也一直被广泛应用于一体机及各种飞行器中。
这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化后,就可以控制电机向相反的方向转动,进而达到稳定的效果。这是一个典型的闭环控制系统。至于用MEMS传感器测量角度变化,一般要选择组合传感器,既不能单纯依赖加速度计,也不能单纯依赖陀螺仪,这是因为每种传感器都有一定的局限性。
比如说陀螺仪输出的是角速度,要通过积分才能获得角度,但是即使在零输入状态时,陀螺依然是有输出的,它的输出是白噪声和慢变随机函数的叠加,受此影响,在积分的过程中,必然会引进累计误差,积分时间越长,误差就越大。这就需要加速度计来校正陀螺仪,因为加速度计可以利用力的分解原理,通过重力加速度在不同轴向上的分量来判断倾角。
由于没有积分误差,所以加速度计在相对静止的条件下可以校正陀螺仪的误差。但在运动状态下,加速度计输出的可信度就要下降,因为它测量的是重力和外力的合力。较常见的算法就是利用互补滤波,结合加速度计和陀螺仪的输出来算出角度变化。
ADI亚太区微机电产品市场和应用经理赵延辉
赵延辉表示,ADI产品主要的优势就是在各种恶劣条件下,均可获得高精度的输出。以陀螺仪为例,它的理想输出是只响应角速度变化,但实际上受设计和工艺的限制,陀螺对加速度也是敏感的,就是我们在陀螺仪数据手册上常见的deg/sec/g的指标。
对于多轴飞行器的应用来说,这个指标尤为重要,因为飞行器中的马达一般会带来较强烈的振动,一旦减震控制不好,就会在飞行过程中产生很大的加速度,那势必会带来陀螺输出的变化,进而引起角度变化,马达就会误动作,最后给终端用户的直观感觉就是飞行器并不平稳。除此之外,在某些情况下,如果飞行器突然转弯,可能会造成输入转速超过陀螺仪的测试量程,理想情况下,陀螺仪的输出应该是饱和输出,待转速恢复到陀螺仪量程范围后,陀螺仪再正确反应实时的角速度变化,但有些陀螺仪确不是这样,一旦输入超过量程,陀螺便会产生震荡输出,给出完全错误的角速度。
还有某些情况下,飞行器会受到较大的加速度冲击,理想情况陀螺仪要尽量抑制这种冲击,ADI的陀螺仪在设计的时候,也充分考虑到这种情况,利用双核和四核的机械结构,采用差分输出的原理来抑制这种“共模”的冲击,准确测量“差模”的角速度变化。但某些陀螺仪在这种情况下会产生非常大错误输出,甚至是产生震荡输出。
“对于飞行器来说,最重要的一点就是安全,无论它的硬件设计还是软件设计,都要首先保证安全,而后才是极致的用户体验。ADI的MEMS传感器设计理念恰好跟此想吻合,我们的MEMS传感器首先是保证在各种极端条件下的稳定性,而后才是追求极致的指标。根据客户实测反馈,在飞行器误操作,不小心掉落后,ADI的陀螺仪输出基本不会受任何影响,而其它某些陀螺仪会出现非常大零点偏移。ADI的加速度计在受到冲击后,也不会产生任何可靠性问题,而其它某些加速度计则会以很大概率出现完全没有输出的现象。这些用户实测出来的差异,都是得益于ADI MEMS传感器在设计时对各种极端情况的充分考虑。”赵延辉说。
集成化方向发展,比如3轴加速度加上3轴陀螺仪的集成产品,甚至是SOC,把处理器也集成进去,直接提供角度输出供后端处理器调用。由于飞行器的应用场景一般都是户外,客户势必会做全温范围内的温度补偿,而在出厂前就对MEMS产品做好了全温范围内的温补,或者是设计超级低温漂的传感器,都会是MEMS产品在这一领域的发展方向。当然可靠性依然是最重要的指标。”他认为。
-
传感器
+关注
关注
2550文章
51014浏览量
752977 -
集成化
+关注
关注
0文章
39浏览量
12149 -
加速度计
+关注
关注
6文章
699浏览量
45889 -
飞行器
+关注
关注
13文章
722浏览量
45495
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论