 关于旋转编码器的分析和应用介绍
关于旋转编码器的分析和应用介绍
在很多电机应用中,轴位置、方向以及速度都是关键信息。设计工程师可以选择轴位编码器,以实时提供这些关键信息。
在多数运动和电机控制设计中,电机轴的位置、方向和速度都是关键信息。对于无刷直流 (BLDC) 电机而言更是如此,此类电机具有优异的效率和可控性,应用范围在不断扩大,但其需要系统控制器准确的“知道”应在何时激励和去激励电机线圈以维持正常旋转。
轴位编码器可用来实时确定电机参数。此类编码器是一种机电元件,可将轴的旋转转换为电信号,再将电信号反馈到电机控制器形成闭环回路。系统就是通过这种方式控制电机轴的位置、速度、速度曲线和转矩,同时还能监控停转或其他故障。在确定了电机轴的位置和方向后,此元件可通过模拟电路或数字过程确定电机轴的速度,甚至是加速度。(请注意,速度是位置对时间的导数,而加速度是速度对时间的导数)。有些场合,会将编码器安装在远离运动传动装置处,这样便会产生一系列敏感性问题,如背隙、溅液、弯曲及其他需要在设计时考虑的机械类问题。
虽然检测电机位置是一个比较简单的概念,但在实际应用中还存在一些难题(从适度的摆动到启动/停止操作的影响),这是因为多数电机的操作环境比较恶劣所致。而且,用户对于精度、分辨率、牢固性及成本的要求也各不相同。
请注意,并不是所有的电机都需要编码器。在洗衣机滚筒等对位置或速度精度要求不高的场合,可使用“无传感器”电机控制。
编码器技术之权衡
为满足上述各类需求,通常可采用基于光学式、磁式(也称为旋转)和电容式原理的三类编码器技术。这三类都是非接触式器件,因此也就消除了较简单的接触式有刷编码器可能会发生的摩擦或磨损问题。
分辨率是需要注意的主要编码器参数。标准编码器的分辨率为48 - 2,048ppr,虽然较高的ppr值能提供更高的精度,但需要的编码器也更贵,从而将加重闭环回路的系统控制器或数字处理器的计算和处理负担。与所有高分辨率器件一样,由于轴位中有噪声、振动或抖动,过高的精度可能会产生不利的影响。编码器输出进入电路,进而将原始信号转换为有用的格式和数据,之后再送入系统控制器。在有些场合,转换是由系统控制器本身完成的。
光电编码器采用玻璃或塑料圆盘(“码盘”),周边有两组缺口。LED光源和光检测器位于码盘的相对面。当码盘旋转时,透光/不透光缺口形成脉冲,指示旋转位置和方向。光电编码器通常需要一个20到40 mA的低压直流电源。
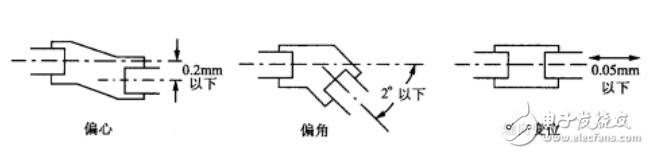
有些光电编码器只有光学部分,而由用户提供实际的码盘;也有一些供应商将码盘作为选件提供,较大的码盘便于实现较高的分辨率。编码器与码盘在安装布局和对齐时需要特别小心,码盘的中心孔必须调整为适合电机轴的尺寸。
Avago Technologies的三通道光学增量编码器模块 HEDS-9040与HEDS-9140系列为具有可选码盘的编码器。每个模块都配备了一个带透镜的LED光源以及采用小型塑料封装的检测器IC,其兼容TTL的输出可支持高达2000 ppr的分辨率。
图1:Avago TechnologiesHEDS-9040/9140系列三通道光电编码器可支持高达2000 ppr的分辨率,供应商也提供了一系列不同尺寸的可选码盘,以提高读数分辨率。
除了两个输出通道,此类编码器还拥有一个用于索引的通道,编码器每转一周,此通道便会输出一个脉冲。在某些应用中,需要使用索引将电机轴位置与已知起点对齐,但也可能需要在操作过程中机械对齐编码器与轴,具体取决于产品的设计。图2所示为HEDS-9040/9140编码器的内部电学部分,包括LED、透镜、光电二极管和输出比较器以及插值码盘。
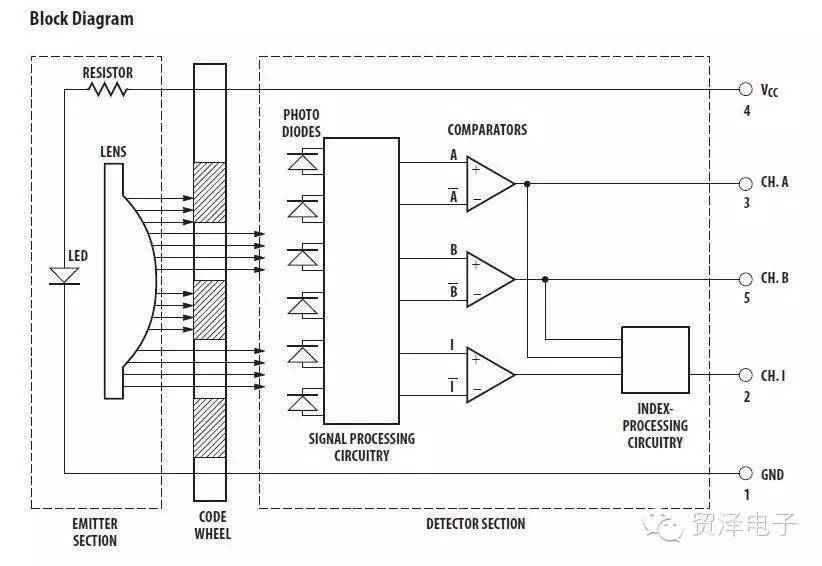
图2:HEDS-9040/9140光电编码器内含单个LED、多个光电晶体管和“调节”光电晶体管输出信号的电路;码盘放置在LED和光电晶体管之间。
Avago同时推出了AEDR-850x反射编码器,其码盘采用反射缺口,而不是透射缺口,同时由于LED光源和光电检测器位于码盘的同一侧,进而可实现更薄的设计。但需要降低最大分辨率,对于多数应用而言,这种限制并不会造成任何问题。此类编码器采用尺寸仅3.95 (L) × 3.4(W) × 0.9562 mm (H)的表面贴装无引线封装形式,非常适合对尺寸和空间有严格要求的应用。
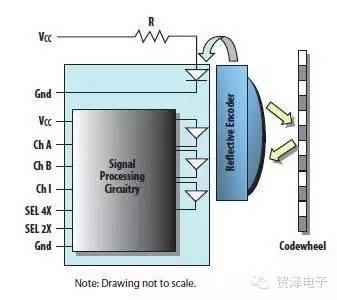
图3:对于更薄的光电编码器解决方案,由带反射缺口的码盘取代了带透射缺口的码盘,比如Avago的AEDR-850x;将光源和接收器放置在同一侧,使得编码器厚度低于1mm。(来源:Avago Technologies)
光电编码器随被广泛使用且相当成功,但也需要满足应用的严格要求。安装环境中通常会充斥着污垢、油污及其他污染物,这些都可能会干扰码盘、缺口以及编码器输出。此外,LED亮度会在10,000到20,000小时(大约1到2年)内减少一半,最终熄灭。有些光电编码器采用塑料码盘以求降低成本,但这类码盘在高温环境下可能会变形(这是很多工业电机安装时常见的现象),因此可能需要使用成本更高且更易碎的玻璃码盘。但无论如何,光电编码器的小尺寸、低成本以及众多的供应商和型号,使其成为设计人员的首选。
电磁或旋转编码器采用一对特殊的类变压器绕组,其初级绕组位于轴上,次级绕组为周围的接收绕组。此类编码采用正弦波激励初级绕组,以在次级侧产生正弦输出,所得输出将根据初级侧波形进行解调。两个波形间的相位差表示轴相对于固定绕组的位置。Ams的AS5145 12位可编程磁旋转编码器就是这类非接触式磁性编码器,作为一款片上系统,它在单颗器件内整合了集成霍尔元件、模拟前端及数字信号处理功能,同时还配备了可用的评估/演示板。
图4: ams的AS5145 12位可编程磁旋转编码器为一款片上系统 (SoC)
作为基本变压器绕组,采用这类设计的编码器坚固耐用、可靠,并且可以在宽温范围内保持一致性,但它需要激励和解调电路,因此需要的电源要高于光电编码器。而且相对于光电编码器,此类编码器的成本和尺寸相对来说也更高、更大,安装时也必须要考虑需要容纳两组绕组。但从另一方面来说,这类编码器是“完整”的,不需要单独提供码盘或类似的配件。
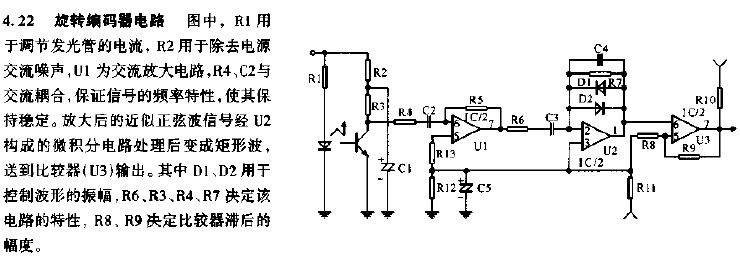
第三种类型是电容编码器,采用了标准线性位置编码器的电容感应工作原理,这是30多年前为游标卡尺而开发的。电容编码器采用杆状或线状形式,一个位于固定元件上,另一个位于活动元件上,构成配置为发射器/接收器对的可变电容。当轴旋转时,编码器中的ASIC电路会对线条变化进行计数,还会进行插值运算以确定编码器位置和旋转方向。这种技术不会受到灰尘、污垢或温度的影响,也没有LED变暗或熄灭问题,而且工作电流低于10 mA。
除了光电、磁性和电容编码器之外,霍尔效应传感器也可用于轴位编码。虽然霍尔效应传感器高效且可靠,但是它们通常仅适用于以相对低的精度/分辨率确定轴位置的场合,例如指示传动轴上的齿轮道。
编码器输出及方向的确定
前面提到的所有编码器均为增量式编码器,也就意味着它们指示的是轴的相对位置,而非绝对位置。因此,“上电”时,系统并不知道轴的角度或位置,此时可采用另一种方法——绝对式编码器,一种在上电后即可确定角度的复杂元件。绝对式编码器更适用于不需要旋转一整圈及以上的轴,例如用于确定经纬仪倾角的仪器支座。但是,这些都不是常规电机转动情形,即便是这些仪器,除了可以使用绝对式编码器之外,也可以选择低成本MEMS加速度计。
然而幸运的是,光电编码器供应商对编码器输出信号格式建立了标准,降低了技术选择难度。此类编码器的“原始”输出为初级或同步信号(通常称为A信号)和偏离初级信号的正交(90⁰)信号(通常称为B信号)。
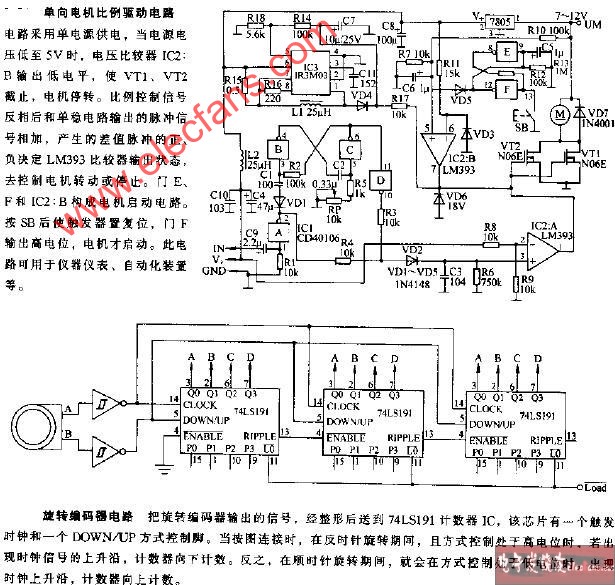
顺时针旋转时,A相超前B相90⁰,在逆时针旋转时,B相则超前 A相90⁰。因此,通过检测两个信号以及它们的相对相位,即可确定旋转方向。编码器的相关元件会产生“向上计数”或“向下计数”脉冲,而系统控制器可通过这个脉冲确定相对位置、速度,甚至是加速度(后者更需要实时处理,并且可能对信号抖动比较敏感)。
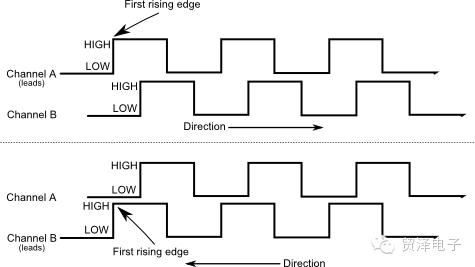
图5: 光电编码器生成两个正交信号;通过观察相对相位差,系统即可确定旋转方向。上图中未显示索引脉冲(如果有的话)(来源:Robotoid, RobotBuilder’s Bonanza, 4th Edition - Application Notes & Bonus Projects;released under Creative Commons 3.0 SA License)
在过去可能会采用绝对式编码的电机轴位传感设计,开始逐渐采用具有第三索引通道的增量式编码器,以根据需要时在上电时确定轴的位置。这是因为知道启动时的绝对位置,对于很多应用来说并不重要,而相对位置与运动信息才是重要指标,所以使用每转一圈产生一个脉冲的索引通道就已足够。
如果编码器的基本输出A和B以及索引信号采用统一的格式,将根据具体编码器型号以不同的级别和兼容性表示这些信号。用户可选择TTL、CMOS、单端和差分A和B以及索引信号,以满足连接编码器输出的电路的接口要求。多数供应商推出的一些编码器都可以选择接口,因此用户可以首先挑选具有所需编码性能的单元,再选择合适的电气接口。
无传感器的设计
有些应用不需要编码器来指示轴位置,这些“无传感器”电机通过多种算法控制,其中包括场定向控制(FOC,也称为矢量控制)。
虽然无传感器方法在BOM内容、成本、空间上具有一定的吸引力,但该方法仍然有一些缺点:不像基于传感器的设计那样精确;可能在扭矩范围内的某些点上存在控制问题,这种情况下需要能够预知并采用控制器和控制算法;可能需要系统处理器执行大量的计算。因此,这类传感器主要用于对轴位置和速度的精度及一致性要求不高的应用中,例如消费类电器(洗衣机和烘干机)、无法容纳编码器的设计,或者编码器是造成任务关键型应用故障的另一个因素的情形。但是,对于工业和仪器仪表安装场合而言,无传感器设计通常不是切实可行的解决方案,而是应当选择并使用非常可靠的编码器。
-
旋转编码器
+关注
关注
5文章
158浏览量
25956
发布评论请先 登录
相关推荐
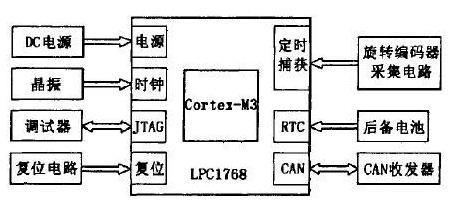
基于CAN总线的旋转编码器采集模块设计
解析旋转编码器的工作原理
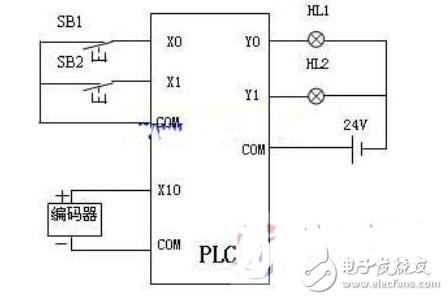
旋转编码器参数_旋转编码器与plc连接
关于旋转编码器在电路中的应用
旋转编码器是什么,它的优势都有哪些
旋转编码器能直接换吗_旋转编码器更换注意事项






 工商网监
工商网监
评论