 关于机器人使用的电机选择分析
关于机器人使用的电机选择分析
但是使用高级算法可以更好的控制马达,比如在电机控制器中嵌入PID(比例 - 积分 - 微分)或FOC(磁场定向控制,有时也被称为矢量控制)。此所需电机操作匹配实际的负载和负载变化,提供增强的、更精确的性能。例如,马达控制算法/程序事关转子惯性,并相应地调整电机驱动,从而降低因机械问题导致的故障。使用定制算法能够使加速和扭矩控制地更精确。
相较于有刷电机,无刷电机(BLDC)需要更复杂的电子控制装置,但也提供更佳性能。 BLDC电机通常需要通过霍尔效应传感器、光学编码器或者通过检测反电动势来进行位置反馈。
机器人中的BLDC电机中经常使用的一种类型是步进电机(图3),它采用中心芯周围的永磁体环来切换电磁场。步进电机并不是传统意义上的“旋转”;相反,步进轴可以以有限的、一步一步的增量(步骤)方式移动,所以,除连续旋转外,可以仅移动完整旋转的一小部分。步进电机具备完全可重复的运动控制;通过指令控制,步进轴可以返回到它之前所在的某个具体位置。
“步”的角度通常可以小到1.8⁰,其中360⁰(一转)产生约200步的动作。30⁰的步进角转一圈共需12步(12×30= 360)。步进角或每转的步数取决于电机具有的永久磁铁数量,但更高或更低值也是可以的。
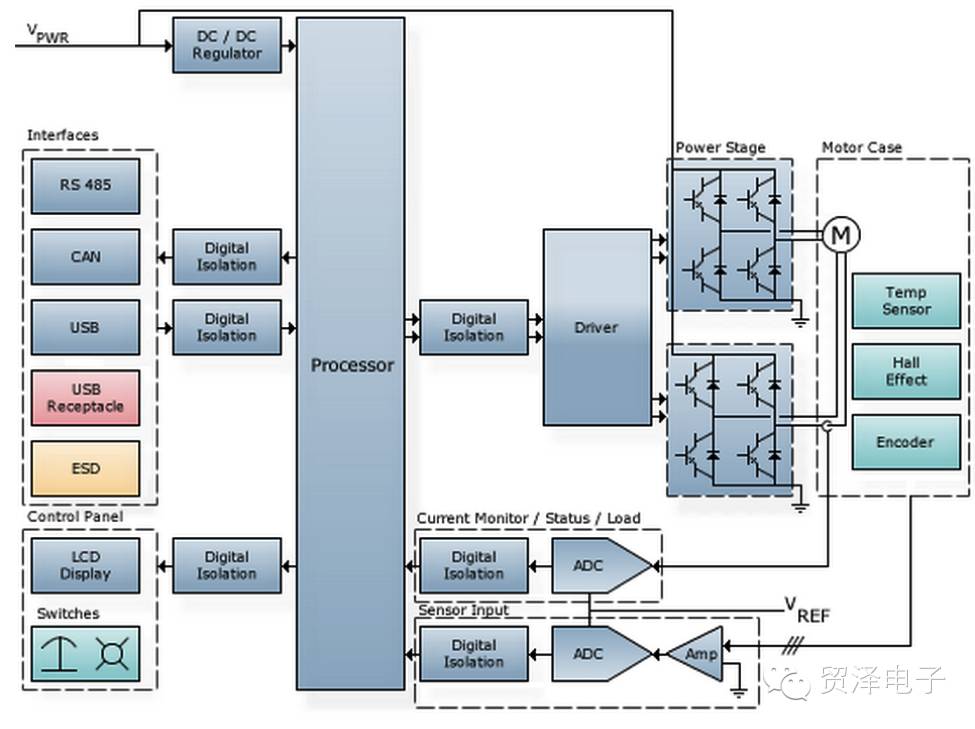
图3:包含所有部件的步进电机框图。 MOSFETS位于功率级。来源:http://www.mouser.com/applications/motor-control-stepper/
在步进电机中,如果电源位于的“连通”状态,但没有步进指示,它们将维持原有位置。步进电机可以在低转速下提供高扭矩。使步进轴移动的最直接方式是按序开关电磁铁,但可能会导致颤动或振动。
无刷直流电机和步进电机之间存在重叠的应用类型。步进电机更适合于要求精确往复运动的应用,如拾取和放置,而不适合长时间的连续转动,以及一些较小型应用,不需要电机提供高转矩或速度。另外,步进电机能效表现上不如无刷直流电机。
还有许多其它电机选项。电机族谱树很长而且复杂,还有许多孪生兄弟姐妹。例如,永磁同步电机(PMSM)是无刷直流电动机(相对于转子)和AC感应电机(相对于定子结构)的组合。它封装较小,却具备高效率,高转矩/重量比,快速响应时间,并且容易控制的优势,但成本也高。
控制要求精度
机器人运动系统不仅仅是一个电机;它包括三个主要功能块:
1.实时控制器,它有以下三种实现方式:
o一个通用的、计算速度快的处理器,运行运动控制固件
o一个专用控制器IC,使用硬连线嵌入式算法。
2.一个或多级串联驱动器,从控制器输出获取低电平信号,并向控制器输出电子开关所需高电压/电流的信号。
3.MOSFET(或其它的开关元件,例如IGBT或双极晶体管),它实际上控制到电机绕组的电流流动。
选择用于电机的MOSEFT需要知道电机和绕组的电流和电压要求。随后开关MOSFET,需要驱动器,反倒由MOSFET的等级来确定。实际上,取决于MOSFET尺寸存在一系列升压驱动器。
选择控制器时的常见问题
选择何种控制是一种策略选择,需要在具体供应商和型号选择之前决定下来。这里存在诸多权衡,比如使用通用处理器,它非常适合于电机控制,以及采用计算友好FPGA或专用的控制集成电路(后者通常来自特殊的运动控制供应商)。设计人员必须考虑的一些关键点包括:
•你需要控制算法的复杂性和复杂度如何,以及需要多少I / O?
•谁提供控制算法和代码:集成电路供应商,与他们合作的第三方,或无关联的第三方?他们如何验证和测试你的电机和应用
•你需要多少用户可编程性?甚至专用的、非可编程控制器允许用户选择算法类型,闭环控制模式(位置,速度,加速度)以及设定操作参数。
•电机和应用是否具有独特属性?如果属实,可编程集成电路是更好选择。是否有对算法的持续个性需求?在这种情况下,具有硬连线嵌入式算法的专用集成电路与比完全可编程的集成电路更好。
•控制器是否必需支持多种类型电机?即使类型唯一,电机尺寸是大小唯一,还是需要保证在某个范围内?
•供应商提供何种级别的技术支持?他们的实际电机动手经验如何?他们是否提供已测试过的详细参考设计,包括控制IC和MOSFET驱动器之间的接口?
•是否需要关心认证问题,比如强制效率(很多电机应用现在必须满足各种“绿色”标准)?如果属实,那么供应商是否了解并满足它们,不管是组件还是算法?
开发套件显示控制器和接口能力
对于许多工程师来说,将所有部件聚集在一起——包含嵌入式或独立算法的控制器,驱动程序和MOSFET——是一个复杂任务,并且他们并不想“反复造车”。因为这些原因,许多供应商提供评估板或完整套件,包括控制器、示范算法、驱动程序和MOSFET。其中一个示例是飞思卡尔MTRCKTSPNZVM1283三相无传感器PMSM套件,使用无传感器电机控制技术来驱动三相BLDC或PMSM电机。这种相当复杂的套件旨在实现通过使用MCU集成ADC模块方式的反电势感应来进行快速原型设计和评估。或者,同一套件(带MC9S12ZVML12 MCU)可以配置为基于传感器的评估,其中具体使用霍尔传感器或分解器来操作。
伴随科技的进展,包括通过提高电机控制和传感实现精确驱动等技术的进步,机器人将有一个激动人心的前景,并将创造新的机遇。传感,控制和电机是三大关键领域,这里的持续创新将塑造机器人的演进方向。
-
机器人
+关注
关注
211文章
28445浏览量
207224 -
电机
+关注
关注
142文章
9023浏览量
145563 -
升压驱动器
+关注
关注
0文章
4浏览量
6350
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论