 开源硬件大赛正式展开,细数十大获奖作品
开源硬件大赛正式展开,细数十大获奖作品
开源硬件与全可编程技术论坛暨 Xilinx 中国大学合作十周年庆典于上海顺利闭幕的同时也拉开了 2017 开源硬件大赛的帷幕。从2006年设立中国大学合作部门开始,Xilinx大学合作在中国已走过10个春秋,得到了中国高校老师的广泛认可,也在教育界引发了“全可编程”技术的创新潮流。同时我们更与众多产业界伙伴合作,共同实现“产、学、研”的有机结合,帮助学生的创新更快地走向实用。庆典活动期间,我们特地挑选了来自“全国大学生智能互联创新大赛”,“IBM-Xilinx 首届异构计算大赛”,“2016 OpenHW 开源硬件设计大赛”等等获奖作品中挑选了一部分作品,以下由小编带大家一睹本届大会所展出的一些精彩设计吧。
基于Zynq的智能物流系统
北京工业大学
作品介绍:项目旨在实现并提供一套校园物流运输最后一公里的解决方案,即解决大学校园中物流不能直接到达最终目的地问题。模型起点为以机械臂为主的机械系统,利用图像识别与深度学习技术扫描物流信息并匹配服务器端数据库,而后抓取与放置货物,完成后发送信息呼叫以智能车和无人机为主的传输系统进行物流交付,用户通过手机端Android APP验证可以打开智能车与无人机上的物流箱进行取货。
作品特点:
基于多机协同技术的智能物流系统。机械臂,摄像头,运输车,快递车,无人机、安卓客户端等设备间的协同调度技术;
运用图像识别与深度学习技术的智能分拣系统。识别订单号,获取货物信息,调度运输系统;
运用Web Server技术的智能推送系统。利用C/S三层架构模型,串联起服务器,数据库,移动端;
运用循迹与GPS导航技术的运输系统。利用多种传感设备实现循迹与GPS导航的稳定性。
东南大学
作品介绍:本设计基于XILINX的Artix-7 FPGA开发板,该机器人主要应用在高楼裂缝检测、高空环境参数测量,高层玻璃清洁等危险系数较高的高空作业领域,减小工人作业的潜在危险。本设计采用串口无线通信远程控制机器人,并且在机器人中集成了摄像头、机械臂、传感器等外围设备,可以实时传输墙面情况,温度、气压等数据。同时,我们在机器人身上加入了一个机械臂,可以用来进行高空取物,清洁玻璃等活动。
作品特点:
以墙面运动型机器人为切入,打破现有的陆地机器人或者空中机器人的设计思维;
利用真空负压原理作为机器人的运动吸附原理,可以达到较大的载重量和较高的稳定性;
采用XILINX公司的FPGA为主控板核心,有效实现多路工作并行处理,工作高效快速。
基于Zynq的民航飞机检测系统
清华大学
作品介绍:本项目开发了一套基于Zynq的民航飞机监测系统。利用天线接收飞机应答机信息,在RTL-SDR模块将天线信号下变频到基带后,经过USB线传输到Zynq开发板并通过软硬件解码读取航班号,速度,高度,位置等信息。我们还在Zynq开发板上架设了HTTP服务器,使用户能通过浏览器观察到飞机的实时飞行信息。除此以外,我们还结合气象雷达对航线信息进行分析并预测。
作品特点:
通过对USB电视接收器进行破解,实现对1090MHz频段飞机应答机信号的接收;
在Zynq开发板上进行Linux操作系统移植和部分信号处理的硬件化,使整套系统能脱离电脑运行;
使用搭建HTTP服务器,实现在移动设备上的可视化的远程界面;
结合气象雷达数据分析飞机运行情况。
室内复杂环境自主导航巡检机器人
南昌大学
作品介绍:自主导航巡检机器人是一款集传感器技术,规划与决策以及人工智能等多功能于一体,并能够自主完成复杂环境的导航和路径规划等任务的机器人系统。
作品特点:
多传感器融合构建地图
利用环境彩色图和深度图构建环境栅格地图
计算栅格地图的观测概率提出隐马尔科夫模型的下一个最佳视点的路径规划
超声波和近红外融合的互补滤波测距法提供机器人相应的保护机制
无线电指纹与视觉组合定位
采用无线电指纹与视觉组合的定位算法,解决了视觉定位的累计误差问题。
提出投影格拉斯曼判别分析算法,通过格拉斯曼流形上的投影尺度,构建离散程度函数,得到信号投影的最佳投影空间。
医学超声成像算法异构加速
华南理工大学
作品介绍:本次展示的项目为IBM-Xilinx 首届异构计算大赛一等奖作品《医学超声成像算法异构加速》。通过使用超能云提供的异构加速技术,把复杂的超声成像算法计算从计算机的大脑CPU移植到了FPGA芯片中。FPGA可以并行处理几十组甚至几百组计算,轻松地完成把超声回声信号转换成超声图像的任务。在我们的竞赛项目中,使用FPGA计算成像比使用CPU计算成像整整快了30倍!
作品特点:
使用了IBM最新推出的SuperVessel异构计算平台,该平台提供了稳定易用的FPGA与CPU的异构计算能力;
在基于CAPI的异构计算平台上实现经典的医学超声成像算法Delay and Sum算法,获得接近30倍的加速比,有助于该算法的实时实现;
通过软件终端 – 网络 – SuperVessel平台三层架构,实现了DAS算法的云计算应用方案
基于zynq的带快速运算异构微服务器及其在气象数据处理中的应用
东南大学
作品介绍:本次“基于zynq的带快速运算异构微服务器”由东南大学计算机学院研发,该微服务器系统由 “带快速运算的微服务器子系统”和 “基于层叠架构多ZYNQ快速运算子系统”组成。带有快速运算的微服务器子系统运行在一块带有Zynq-7000的Zynq开发板上。该系统首先被用于气象数据处理中快速处理气象水文信息报文,绘制气象水文信息等值线图以及快速生成历史卫星云图的特征值,用于实时查询相似气象云图。“基于zynq的带快速运算异构微服务器”还可广泛运用于需要大量数据运算和需要便携式微服务器的各种领域。
作品特点:
FPGA部分负责小规模算法的加速运算,ARM搭建了Web服务器系统对外发布有关信息;
研发了基于Zynq的4-8块层叠架构,ARM部分负责数据通信和任务分配,FPGA部分负责大数据量的快速运算;
子系统通过千兆网互连,并与PC机连接,共同构成气象信息处理的完整架构
基于Zynq的图像识别系统设计
桂林理工大学博文管理学院
作品介绍:比赛以第一人称视角(FPV)遥控操作飞行器,完成指定飞行与图像识别及拍摄任务、数据回传及保存数据任务。飞控通过PID算法实现无人机飞行姿态控制和高度控制。图像识别模块采用Xilinx Zynq-70100全可编程系统级芯片的嵌入式开发板,在Linux系统下开发基于OPENCV视觉库的图像识别及拍摄保存算法,完成图像识别并拍摄保存图片任务。
作品特点:
采用Xilinx Zynq-7010 芯片开发板作为图像处理单元,芯片功能强大,运行稳定,可以完全胜任图像识别任务;
开发板具有便携性, 在Zynq开发板上进行Linux操作系统移植和部分信号处理的硬件化,使整套系统能脱离电脑运行,搭载在四轴飞行器上可以随时随地识别指定目标,机动性强。
一种高效的基于整帧丢失的错误隐藏方法的FPGA实现
中山大学
作品介绍:本次项目比较了目前最主流的帧拷贝(FC)、基于块的向量外插方法(BMVE)、基于像素级的向量外插方法(PMVE)、基于混合的向量外插方法(HMVE)、MV-OBEC这些方法和本项目的基于优先级的方向性交叉平均滤波(或者使用高斯滤波)的向量外插方法。通过比较这些方法对很多序列的PSNR和SSIM的结果,可以看出本项目的算法的优越性。尤其是在运动十分剧烈的情况下,本算法的优越性更加得以体现。同时采用了FPGA做硬件加速做成易用的IP,使得本算法的实用性和商用性大大提高。
作品特点:
使用中值滤波补全参考帧的向量场;
基于优先级的向量外插错误隐藏算法;
最近最优邻居匹配策略;
提出了方向性交叉平均滤波器;
双Zig-Zag滤波路径;
把错误隐藏封装成了易用的IP。
基于虚拟体验的环境感知无人车
扬州大学
作品介绍:本无人车以百度地图规划的线路为作业路径,通过惯性导航实现自动巡航,并实时传输定位信息至移动监控端以实现地图定位;设计雷达侵入传感系统,通过独立ZigBee节点传输感知信息,以无人车为中继节点,传回移动监控端后,传输至云平台,可供用户查看;此外,通过智能手套控制无人车,配合地图预置任务实现对传感器节点的回收和放置,可通过虚拟控制手柄控制摄像头,并传回视频信息至移动终端。本项目支持语音识别、控制与人机交互功能。
作品特点:
基于云地图的路径规划;
基于AHRS的惯性导航;
结合AR的远程控制;
低成本的无中继数据采集。
基于Zynq电脑鼠的陆空互联系统
成都信息工程大学
作品介绍:借助Xilinx公司推出的FPGA+ARM的异构处理平台ZYNQ系列芯片,利用无人机、电脑鼠和PC端分别模拟车载无人机、载人车和终端处理器。无人机在高视点对道路(迷宫)进行图像捕捉,并图传至终端;终端处理器还原出实际路况无线发送给载人车;载人车通过车载传感器和终端发送的信息实现实时探测未知道路、规划最优路径、避开危险区域等功能。
作品特点:
无人机检测与图像处理;
自动路径规划;
大范围区域隔离。
-
无线电
+关注
关注
59文章
2131浏览量
116320 -
智能物流
+关注
关注
4文章
309浏览量
22642
发布评论请先 登录
相关推荐
预决赛节点公布丨第七届CCF开源创新大赛火热进行中!

如何帮助孩子高效学习Python:开源硬件实践是最优选择
10万奖金池!CCF开源创新大赛-OpenHarmony应用开发大赛,等你来战!
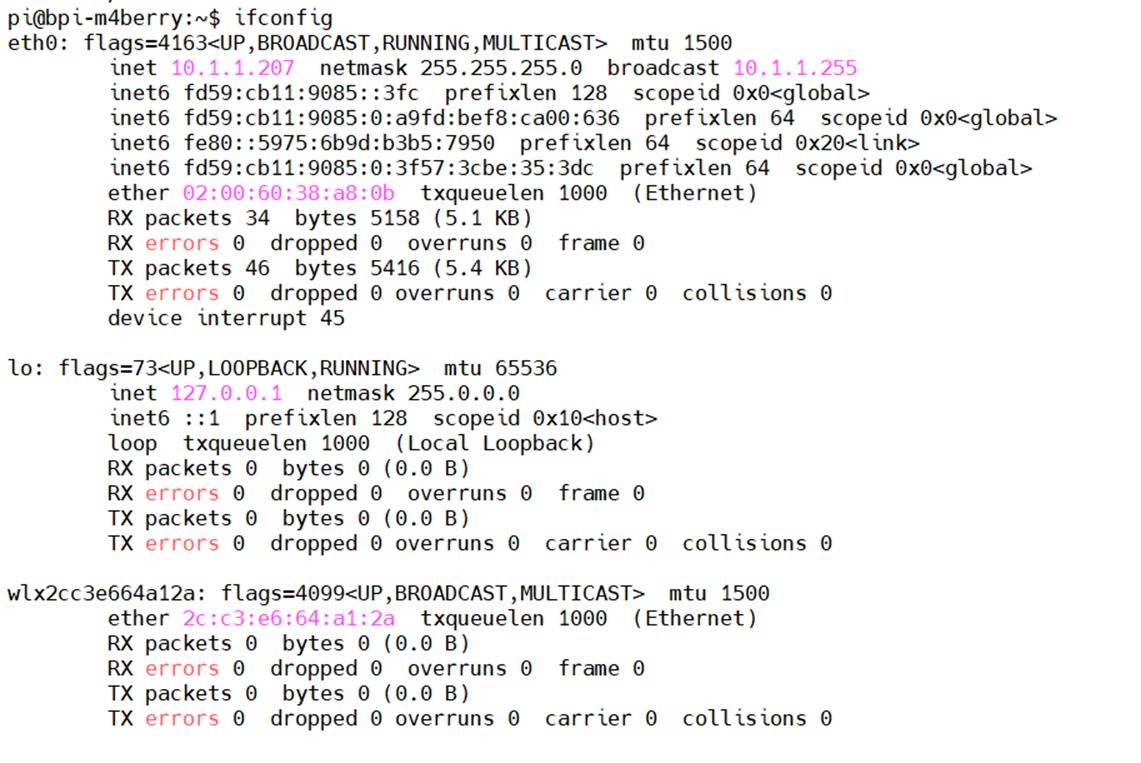
Banana Pi BPI-M4 Berry 开源硬件开发板以太网口和WiFi测试
北理工开源鸿蒙英才班学子荣获开放原子开源大赛全国一等奖
48 支团队“码”上行动 · 6 个赛项展现实力——开放原子开源大赛(第二批)落下帷幕

软件定义世界 开源共筑未来 首届“开放原子开源大赛”火热进行中

48支团队“码”上行动 · 6个赛项展现实力——开放原子开源大赛(第二批)落下帷幕


Banana Pi BPI-W3 开源硬件开发板应用特点
快速上手Banana Pi BPI-M4 Zero 全志科技H618开源硬件开发开发板






 工商网监
工商网监
评论