 Facebook AI开源机器人框架 PyRobot
Facebook AI开源机器人框架 PyRobot
导语:FacebookAI研究人员开源了一款机器人框架PyRobot,它以灵活、简便、易上手的特性,进一步降低了机器人研究与应用的成本。
6月24日消息,近日,Facebook AI研究团队开源了机器人框架PyRobot,该框架是与美国卡耐基梅隆大学(Carnegie Mellon University)研究人员合作创建的,能够运行由Facebook的机器学习框架PyTorch训练的深度学习模型。
同时,该机器人框架能够为AI社区提供一个共享代码、数据集和模型的公共API,进一步降低了研究人员的研发成本和开发时间。
这一研究成果已于美国时间2019年6月19日发表在arXiv平台上,名为《PyRobot:用于研究和基准测试的开源机器人框架(PyRobot: An Open-source Robotics Framework for Research and Benchmarking)》。
目前仅支持Sawyer和LoCoBot机器人
近年来,Facebook的AI团队非常热衷于研发机器人技术。
在过去的一年中,Facebook进一步拓展了公司在全球范围内的机器人研究工作。今年5月,Facebook进行了六足机器人行走训练;上周,该公司又推出了一款可以训练人工智能代理的模拟器AI Habitat,以及Replica真实感训练数据集。
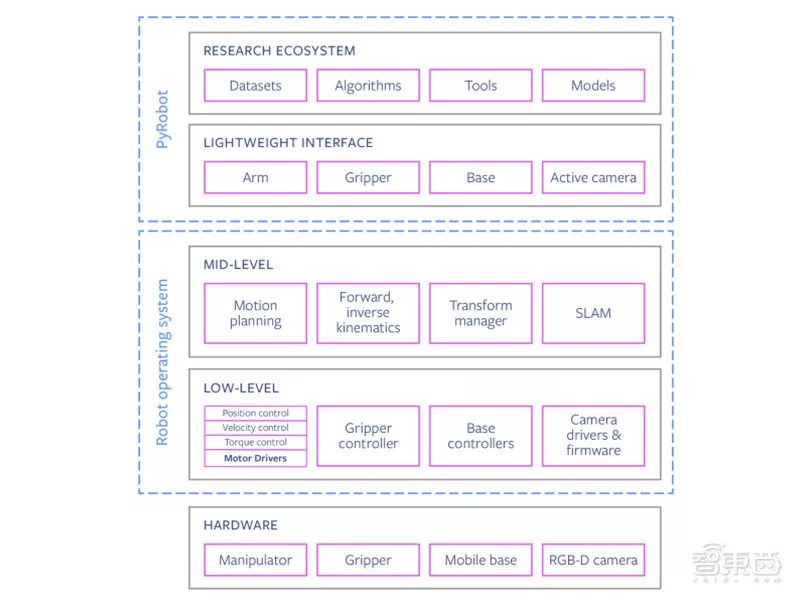
这次开源的PyRobot,是一个基于PyTorch的机器人框架。同时,还是一个轻量级的、基于机器人操作系统ROS(Robot Operating System)的高级接口,用于在机器人学习中进行基准测试和运行实验。
PyRobot目前支持Sawyer和LoCoBot两种类型的机器人。
其中Sawyer是一个7DoF的协作机械臂,广泛应用于机器操控、包装、ECM自动化等众多领域,并已成功进入电子、汽车、金属制造等多个行业;而LoCoBot是一个移动机械臂,主要用于卡内基梅隆大学机器自动化课程。
此外,支持UR5机器人等其他机器的开源框架也即将推出,其中包括MuJoCo和Habitat等模拟器在内的集成也在计划发布中。
辅助AI实践人员轻松进行实验与测试
Facebook AI在发表的论文中表示,他们相信PyRobot机器人框架与最近发布的LoCoBot机器人的结合,能降低研究人员的研发成本和开发时间,从而实现数据驱动机器人的民主化发展。
同时,独立于硬件的API(应用程序编程接口)也将帮助整个社区共享的代码和数据集的开发。
Facebook AI研发的PyRobot框架,能够为AI研究人员和维修人员降低入门门槛,帮助他们在几个小时内就能基本熟悉并轻松设置机器人,设置完后即可开始使用。
PyRobot还能为AI社区提供一个共享代码、数据集和模型的公共API,从而加快机器人的应用,并促进机器人研究生态系统的发展。
一方面,研究人员为PyRobot设计了一个预训练模型,专门用于导航、抓取和推送算法,让机器人能够进行相关数据搜集的远程操作,使机器人的学习过程更加简便。
另一方面,PyRobot还为控制机器人运动的命令提供API和高级代码,例如路径规划、视觉SLAM(视觉定位与地图构建)、关节位置控制、关节速度控制和关节扭矩控制,让机器人的使用更加地灵活。
基于此,PyRobot框架可以帮助AI研究人员进行实验和测试结果。除此之外,Facebook AI还计划与机器人研究社区的成员合作开发基准数据集。
简化sim2real传输策略测试
研究人员表示,在PyRobot的一些初始项目中,该框架简化了用于测试末端执行器控制和点目标导航的sim2real传输策略测试。
和亚马逊的RoboMaker一样,PyRobot也可作为机器人操作系统(ROS)的界面。此外,微软在今年5月发布了一个机器人工具包的有限预览版,并在去年将ROS集成到Windows 10中。
值得一提的是,除了深度学习框架PyTorch外,Facebook还在本月推出了PyTorch Hub,以支持人工智能模型的复现性。
结语:Facebook正持续进行AI开源
PyRobot机器人框架能够为AI社区提供一个共享代码、数据集和模型的公共API,拥有灵活、简易等特性,进一步降低了机器人研发的复杂程度,促进机器人研发生态系统的发展。
过去一年以来,Facebook在人工智能领域不断推出创新研究成果,并开源了PyRobot、Habitat等技术,而该公司在人工智能领域所做的这些努力,在今后也将进一步为人工智能机器人研究与应用降低成本,为研究人员的开发和实验带来更多的便利,帮助研究人员进一步推动机器人商业化的落地与应用。
-
Facebook
+关注
关注
3文章
1429浏览量
54799 -
开源
+关注
关注
3文章
3366浏览量
42558
原文标题:Facebook开源机器人框架PyRobot,拥有独立API,轻松上手快速实践
文章出处:【微信号:aicapital,微信公众号:全球人工智能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
图纸代码完全开源!稚晖君:人人都能造人形机器人!
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
全球机器人开发领域采用NVIDIA 机器人开发和生产
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
星动纪元开源人形机器人训练框架Humanoid-Gym
英伟达推出全新AI聊天机器人
机器人基于开源的多模态语言视觉大模型






 工商网监
工商网监
评论