 磁感应式传感器由什么组成
磁感应式传感器由什么组成
- Load:0 second
- Duration:0 second
- Size:0x0
- Volume:0%
- Fps:8fps
- Sudio decoded:0 Byte
- Video decoded:0 Byte
磁感应式传感器的基本结构如下图所示。磁感应式传感器主要由信号转子才感应线圈、永久磁铁和磁扼组成。
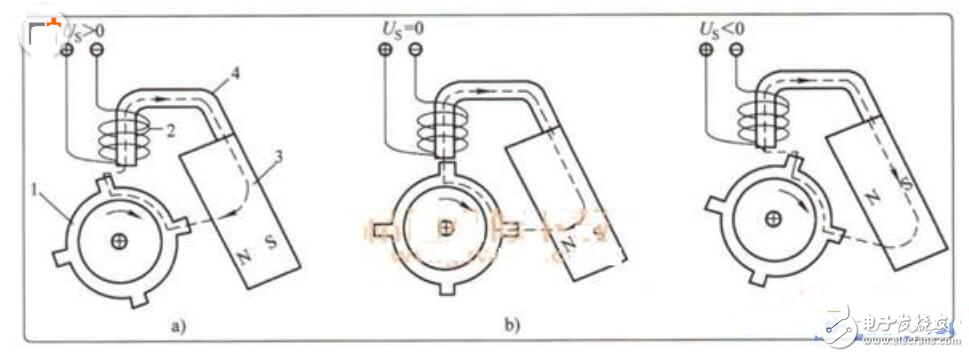
磁力线穿过的路径:永久磁铁N极→定子与转子间气隙→转子凸齿→转子凸齿与定子磁头间气隙→磁头→导磁板→永久磁铁S极。
当信号转子旋转时,磁路中的气隙会周期性发生变化,磁路的磁阻和穿过感应线圈磁头的磁通量随之发生周期性变化。根据电磁感应原理,感应线圈中就会感应产生交变电动势。
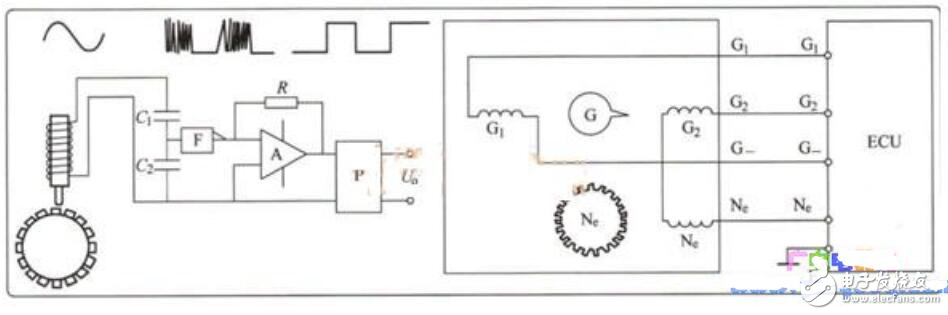
磁感应式传感器电路组成包括信号发生器、滤波电路、放大电路、整形电路以及线束插头等,如上图所示。传感器中的磁通φ和电动势E的波形如下图所示。
1)当信号转子顺时针旋转时,转子凸齿与磁头的气隙减小,磁路的磁阻减小,磁通量φ增多,磁通变化率增大,即gs1,感应电动势为正,即E>0,如图中曲线abc所示。
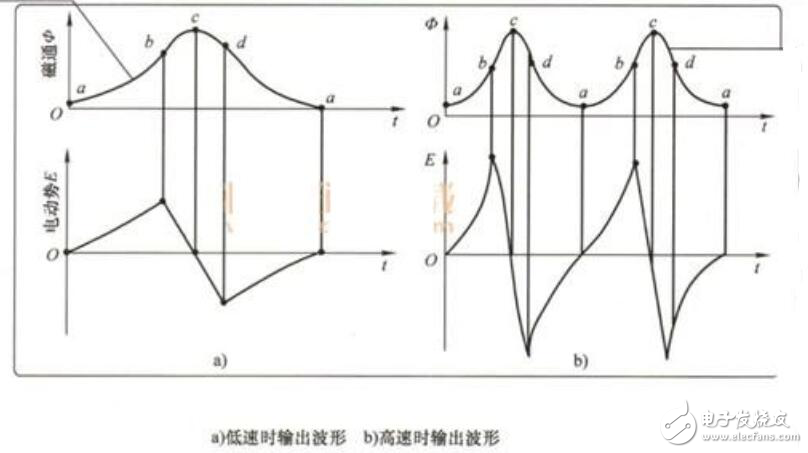
2)当转了凸齿接近磁头边缘时,磁通量φ急剧增多,磁通变化率最大,即GS2,感应电动势最高(E=Emax),如图曲轴b点所示。转子转过b点后,由于磁通变化率减小,因此感应电动势E降低。
3)当转子旋转到凸齿中心线与磁头中心线对齐时,(如图b),由于磁通变化率为0,因此感应电动势E=0,如图中c点所示。
4)当凸齿离开磁头时,(如图c),凸齿与磁头间气隙增大,磁阻增大,磁通量φ减少,所以感应电动势E变为负值,如图中曲线cda所示。当凸齿即将离开磁头边缘时,磁通量φ急剧减少,磁通变化率达到负向最大值,即GS3感应电动势E也达到负向最大值,如图中曲线d点所示。
5)总之,信号转子每转过一个凸齿,就会在感应线圈中产生一个周期的交变电动势,感应线圈输出端输出一个交变电压信号。当发动机转速变化时,信号转子凸齿转速也随之变化,转速越高,感应电动势也越大,如图b所示。
-
传感器
+关注
关注
2554文章
51585浏览量
757837 -
转子
+关注
关注
2文章
328浏览量
17999 -
磁铁
+关注
关注
0文章
94浏览量
13558 -
磁感应
+关注
关注
2文章
75浏览量
17681
发布评论请先 登录
相关推荐
电磁感应原理与应用 电磁感应现象的实际应用
CL.1-JKT09磁感应接近开关由什么组成
霍尔式传感器工作原理与电磁感应有什么关系
电磁式传感器工作原理?汽车有哪些地方用到此传感器?
互感式传感器的工作原理与什么相似
互感式传感器是根据什么原理制成的
互感式传感器主要由什么组成
LMP91300 工业用感应式近距离传感器模拟前端 (AFE) 数据表

磁感应微型滑块式位移传感器
RL78/G23用于感应式接近传感应用的主要特性






 工商网监
工商网监
评论