 《自然-通讯》发表 报告钵水母碟状幼体为灵感的无缆软体机器人
《自然-通讯》发表 报告钵水母碟状幼体为灵感的无缆软体机器人
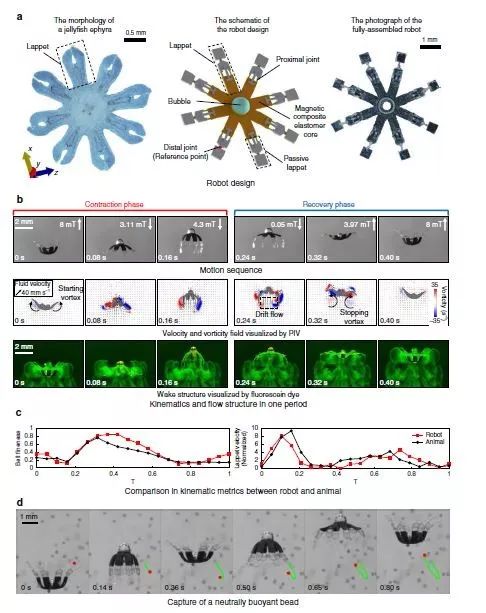
本周《自然-通讯》发表的一篇论文 Multi-functional soft-bodied jellyfish-like swimming 报告了一种以钵水母碟状幼体(scyphomedusae ephyra)为灵感的无缆软体机器人,它仅有几毫米大小,却具备运输和钻挖等多种功能。研究表明,该机器人能够操控其周围的水流动,完成一系列任务。
受水母启发的微型机器人的设计及游泳行为
游泳机器人具有生物医学和环境应用方面的潜力。虽然目前已有能够游泳的微型机器人设计,但是随着机器人尺寸的下降,诸如复杂物体操控等高级功能仍是一项不小的挑战,因为这种机器人可以搭载的组件大小是受限的。
水母机器人的活动情况和各功能展示
德国马克斯·普朗克智能系统研究所的Metin Sitti及同事设计并制造了一种仅有几毫米大小的机器人,他们将一个磁性复合弹性体核(直径3毫米)与8个可弯曲的垂瓣连接在一起,施加振荡磁场后,这些垂瓣便会收缩再恢复,就像游泳的水母一样。除了游泳,他们的水母样机器人也能选择性地运输不同大小的球珠(模拟捕食)、钻入球珠中逃避捕食者或目标对象、混合不同的流体以及在其尾迹中生成一条化学路径。作者认为他们的机器人设计也可用作模型系统,帮助理解环境中的变化如何影响水母碟状幼体的生存。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208907 -
微型
+关注
关注
0文章
24浏览量
17856
原文标题:[机器人频道|大V说]多功能水母机器人(内有魔性视频)
文章出处:【微信号:robovideo,微信公众号:机器人频道】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
清华大学:软体机器人柔性传感技术最新研究进展
随着机器人技术的发展,配备柔性传感功能的软体机器人在医疗辅助康复、水下资源勘探、陆地灾难救援等领域发挥着重要作用,如何设计高性能柔性传感器,实现软体

ABB机器人与西门子PLC通讯案例
重要意义。本文将通过一个详细的案例,解析ABB机器人与西门子PLC之间的通讯实现过程,涵盖硬件准备、网络配置、通讯设置、编程调试及故障排查等多个方面,为自动化生产线的构建与优化提供技术
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
的设计不仅提高了机器人对环境的理解能力,还使其能够更精准地执行复杂任务。
扩散模型的新思路
除了大模型,扩散模型的引入为机器人控制开辟了新的研究方向。在以UniPi为代表的创新工作中,
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
高压放大器在水下扑翼软体机器人研究中的应用
实验名称:水下扑翼软体机器人的实验平台搭建 实验目的: 良好的运动性能是水下软体机器人的基本功能要求。而实验是检验设计是否合理、实验样机是否达到功能要求的重要手段。为了验证设计的可行性


机器人技术的发展趋势
机器人技术的发展趋势呈现出多元化、智能化和广泛应用的特点。 一、智能化与自主化 人工智能(AI)与机器学习 : AI和机器学习在机器人领域的应用日益普及,
高压放大器在介电弹性体折纸术软体机器人中的应用
更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足

清华大学:软体机器人柔性传感技术最新研究进展
清华大学深圳国际研究生院曲钧天助理教授的海洋软体机器人与智能传感实验室(Ocean Soft-Robot and Intelligent Sensing Lab,OASIS-LAB)在软体机器

Al大模型机器人
理解能力强大: AI大模型机器人可以理解和生成自然语言,能够进行复杂的对话和语言任务。它们能够识别语言中的语义、语境和情感,并据此作出适当的回应。广泛的知识储备: 这些模型基于大规模的数据集进行训练,拥有
发表于 07-05 08:52
PLC与机器人之间如何通讯
在现代工业自动化领域,可编程逻辑控制器(PLC)和机器人作为两大核心设备,其间的通讯是实现自动化生产线高效、稳定运行的关键。PLC以其高可靠性、强适应性和易编程性等特点,在工业自动化控制中占据重要
Aigtek:介电弹性体高压放大器在软体机器人研究中的应用
近年来软体机器人的研究成为目前机器人研究领域的热点,由于软体材料的自由度可以根据需求自由变化,因此软体机

高压放大器在介电弹性体折纸术软体机器人中的应用
,机器人被赋予了更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足刚性
发表于 02-27 17:15





 工商网监
工商网监
评论