 大话中国C-V2X通讯标准应用层标准
大话中国C-V2X通讯标准应用层标准
一、前言
2017年9月18日,中国智能网联汽车产业创新联盟携手重庆长安汽车、通用汽车、清华大学等单位发布了我国第一部V2X应用层团体标准:《合作式智能运输系统 车用通信系统应用层及应用数据交互标准 T/CSAE 53-2017》,该标准的发布填补了我国V2X应用层标准的空白。
2020年12月31日,中国智能网联汽车产业创新联盟联合星云互联、重庆长安汽车、通用汽车等单位对2017年的标准进行了完善,推出《合作式智能运输系统车用通信系统应用层及应用数据交互标准(第一阶段)T/CSAE 53-2020》(以下简称DAY1)标准代替了T/CSAE 53-2017标准。与此同时,中国智能网联汽车产业创新联盟也联同星云互联科技、电信科学技术研究院、华为技术有限公司等单位推出了V2X第二阶段标准:《合作式智能运输系统车用通信系统应用层及应用数据交互标准(第二阶段)》(以下简称DAY2标准),在第一阶段标准基础之上丰富了应用层场景。
北汇信息作为蜂窝车联(C-V2X)工作组成员,2019年进入C-V2X市场后,深耕C-V2X测试领域,已为数十家企业交付了成套的C-V2X测试台架及测试服务,包括国内多家汽车整车厂、零部件企业以及检测机构。
1.1在DAY1标准中对合作式智能运输系统车用通信系统进行了描述
合作式智能运输系统车用通信系统,旨在通过智能运输系统各子系统之间的信息交互,实现道路安全、通行效率、信息服务等各类应用。为此,不同厂商车辆之间,以及这些车辆与其所能到达的区域范围内的道路基础设施之间,必须实现互联互通。
以车用通讯系统中的车载单元(OBUOn-Board Unit)为例,车载设备通常包括了如下图所示的子系统:
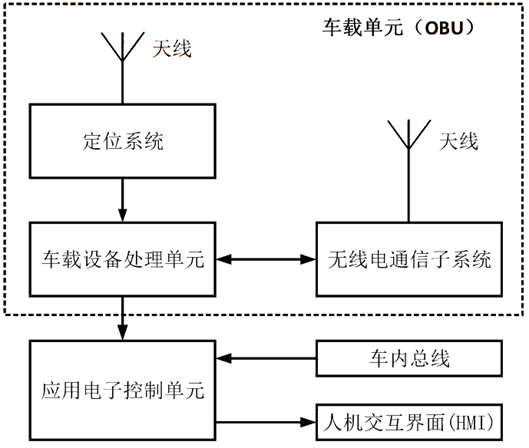
图1合作式智能运输系统车用通信系统车载设备构成示意图
- 无线电通信子系统:接收和发送空中信号。一个车载设备里可以装配一个或者多个无线电通信子系统;
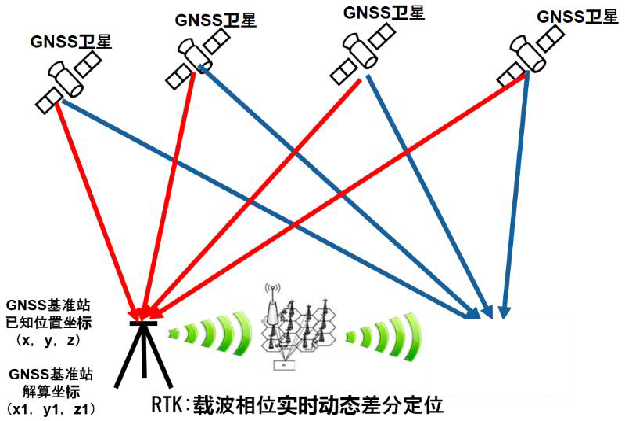
- 定位系统:该子系统通常包含全球导航卫星系统(GNSS, Global Navigation Satellite System)接收器,用以提供车辆的位置、方向、速度和时间等信息。该子系统可以通过车速信号、惯性测量单元、差分定位系统等技术来实现增强定位;
- 车载设备处理单元:运行程序以生成需要发送的空中信号,以及处理接收的空中信号;
- 天线:实现射频信号的接收和发送。
车载设备通过接口与应用电子控制单元相连,在应用电子控制单元中运行程序实现车用通信系统的应用,并通过人机交互界面(HMI, Human Machine Interface)来实现对驾驶员的提醒,包括图像、声音、振动等方式。
1.2标准对应用范围进行了圈定
基于国际标准化组织(ISO)指定的通讯系统七层参考模型,及欧美正在制定的车用通讯系统构架,车用通信系统通常可以分为系统应用、应用层、传输层、网络层、数据链路层和物理层。DAY1标准着重关注了应用层及应用层与上下相邻两层的数据交互接口,如图2所示。应用层协议主要包括消息集和消息集内的数据帧与数据元素,以及消息的数据结构和编码方式。DAY1标准通过对道路安全、通行效率和信息服务等基础应用的分析,定义在实现各种应用时,本车与其他车辆、道路交通设施及其他交通参与者之间的信息交互内容、交互协议与接口等。
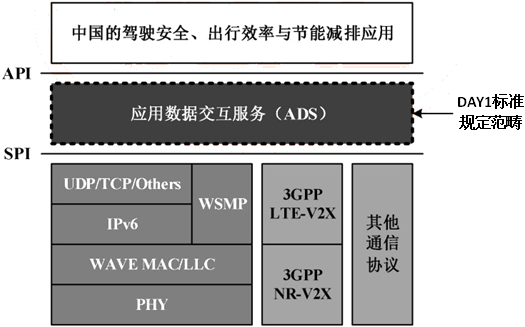
图2标准范围示意图
二、车用通信系统基础应用
2.1 DAY1应用场景
DAY1标准选择了安全、效率、信息服务三个方面覆盖了17个应用场景,包括前向碰撞预警、交叉路口碰撞预警、异常车辆提醒、绿波车速引导、前方拥堵提醒、汽车近场支付等。如表1:
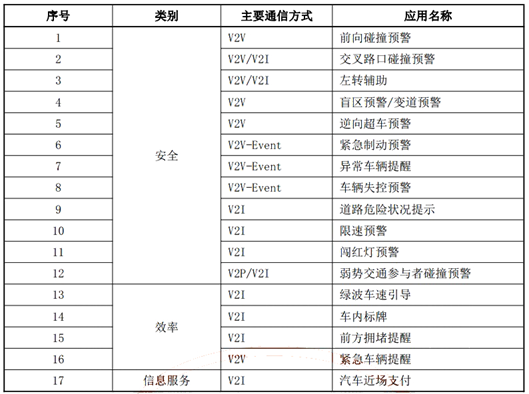
表1 DAY1应用列表
DAY1标准在应用定义、主要场景、系统基本原理、通信方式、基本性能要求和数据交互需求6个方面对17个场景进行定义的同时,也根据应用对通信频率和时延的不同需求将17个一期应用分为了两大类:
- 一是高时延(>100 ms)、低频率(<10 Hz)的应用,可通过4G蜂窝通信技术实现;
- 二是低时延(≤100 ms)、高频率(≥10 Hz)的应用,需要LTE-V2X、DSRC或5G通信技术的支持才能实现。
通过对比DAY1阶段的CSAE53-2017和CSAE53-2020两个版本需求,我们不难发现,相较于CSAE53-2017标准,CSAE53-2020对定位精度提出了更高要求,如表2所示:
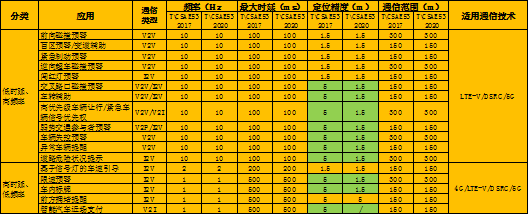
表2一期应用按通讯需求分类表
除前方拥堵提醒定位精度保持5m、智能汽车近场支付定位精度取消外,其余应用都将定位精度由5m提升到了1.5m,这对GNSS定位精度提出了更高的要求。
2.2 DAY2应用场景
DAY2标准基于DAY1标准,选择面向安全、效率、信息服务、交通管理、高级智能驾驶等领域,定义了12个典型应用,其中包括感知数据共享、协作式变道、协作式车辆汇入等应用,如表3:

表3 DAY2应用列表
DAY2标准也在应用定义、预期效果、主要场景、系统基本原理、通信方式、基本性能要求和数据交互需求7个方面,对12个第二阶段应用场景分别进行描述。
对比DAY1和DAY2标准,我们不难发现,DAY1标准的应用场景更多关注的是单车在车路协同环境下的预警功能实现,而在DAY2阶段,更多的场景则聚焦到了车路协作、交通控制管理等方面。笔者从场景分类维度对DAY1和DAY2中的场景进行了区分,如表4:

表4中国标准V2X通讯应用场景
由表4我们可以看到,DAY2标准中,对盲区预警/变道预警、弱势交通参与者碰撞预警、紧急车辆提醒三个场景进行了更为深入的研讨。在对应的安全分类中加入了感知数据共享、协作式车辆汇入、协作式交叉口通行应用场景,在效率分类中新加入了道路收费服务、动态车道管理、协作式车辆汇入及协作式交叉口同行场景,在信息服务分类中加入了差分数据服务、场站路径引导服务、道路收费服务应用场景。同时也新增加了交通管理及高级智能驾驶两个分类,在交通管理分类中新增了动态车道管理及浮动车数据采集应用场景,在高级智能驾驶分类新增了协作式车辆编队管理应用场景。
值得关注的是,DAY2标准更聚焦于“协作”上,DAY2标准中对于车辆的命名由DAY1标准中的HV(Host Vehicle)和RV(Remote Vehicle)变为了EV1(Equipped Vehicle 1),EV-2(Equipped Vehicle 2),这也意味着标准由DAY1阶段的关注自车“权益”转向了DAY2阶段的关注交通参与者的“权益”,也佐证了笔者DAY2标准更聚焦于“协作”的观点。
本文以DAY1中的盲区预警/变道预警场景和DAY2中的协作式变道场景为例说明。
盲区预警/变道预警和协作式变道两个场景共同关注点及预期效果都在于两辆车之间如何安全的进行变道,以消除驾驶盲区所带来的驾驶风险。图3、4、5分别是DAY1的变道预警场景和DAY2的协作式变道场景,展示了一辆车(盲区预警/变道预警场景中为HV,协作式变道场景中为EV-1)在行驶过程中意图变道,另一辆车(盲区预警/变道预警场景中为RV,协作式变道场景中为EV-2)在该过程中存在安全风险,以期避免风险产生的过程。不同的是盲区预警/变道预警场景的预期目的是HV驾驶员收到预警后,能有足够时间采取措施,避免与相邻车道上的 RV发生碰撞。而协作式变道场景的预期目的则是相关车辆(EV-2)接收到 EV-1变道意图信息,结合自身行驶状态与周围环境信息做出判断,采取减速让道或加速通过驾驶行为。
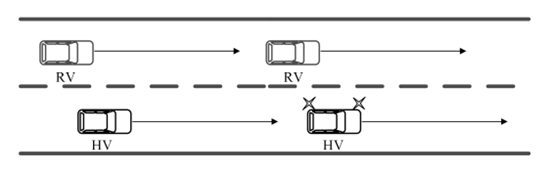
图3 DAY1盲区预警/变道预警场景

图4 DAY2协作式变道场景EV-2加速通过

图5 DAY2协作式变道场景EV-2减速让行
在盲区预警/变道预警场景中关注的是HV的行驶安全及状态,而在协作式变道场景更多关注的是协作车辆之间的协作行为。
三、应用层交互数据集
CSAE应用层标准遵循“消息集-数据帧-数据元素”三层嵌套结构规则对应用层数据集进行制定;采用了ASN.1抽象语法进行定义,实现了跨平台和不同编程语言的兼容;考虑到射频性能,数据集交互的编解码方式遵循非对齐压缩编码规则UPER(Unaligned Packet Encoding Rules),有效压缩空口通信数据包的大小。
在DAY1标准中定义了基础的BSM、SPAT、RSI、MAP、RSM五大类消息,如图6。DAY2在DAY1基础上对MAP、RSI消息进行了拓展之外,也新提出了PAM、PSM、RSC等新的消息体,如图7。
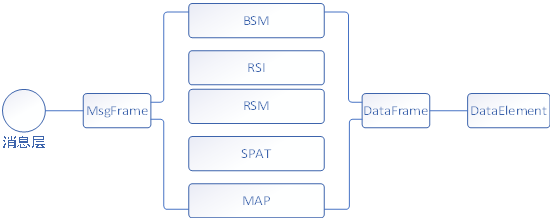
图6 DAY1中的应用层交互数据集
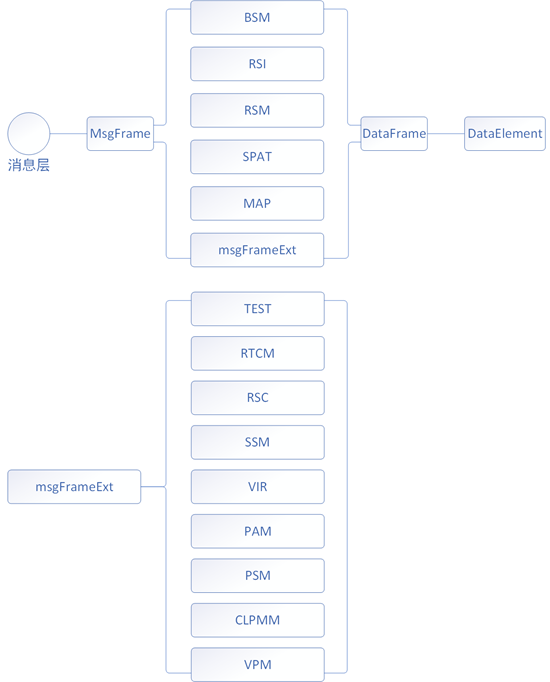
图7 DAY2中的应用层交互数据集
四、总结
DAY1标准、DAY2标准的推出对中国V2X通信标准的建立和深化有着重要意义,对车用通信系统应用场景开发、验证及商用起到了极大的推动作用。
北汇信息作为蜂窝车联(C-V2X)工作组成员,2020年也参与到了由中国智能网联汽车产业创新联盟、IMT-2020(5G)推进组C-V2X工作组、中国汽车工程学会等单位承办的“C-V2X新四跨暨大规模先导应用示范活动“中,如图8。

图8北汇信息在“C-V2X新四跨暨大规模先导应用示范活动“
北汇信息专注于汽车电子,深耕C-V2X测试,提供专业多元化的C-V2X测试系统搭建及测试咨询服务。
本次为大家简单介绍了中国V2X通讯标准应用层标准,后续将会为大家带来更多的基于C-V2X测试的相关内容。同时也欢迎垂询和沟通,共同探讨。
注:本文图片素材源于CSAE 53-2017合作式智能运输系统 车用通信系统应用层及应用数据交互标准、CSAE 53-2020合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第一阶段)、CSAE 157-2020合作式智能运输系统 车用通信系统应用层及应用数据交互标准(第二阶段)
-
智能网联汽车
+关注
关注
9文章
1082浏览量
31100
发布评论请先 登录
相关推荐
C-V2X测试探秘系列之电磁兼容试验方法

MHMF092L1C2-MINAS A6 系列 标准规格书 松下

是德科技出席2024 C-V2X“四跨”(上海)先导应用实践活动
PCM2707C是否支持Android系统?PCM2707C Android应用层怎么写?
物联网设备的标准与规范
Linux应用层控制外设的两种不同的方式
60V 容差板和标准 TPS272C45 评估模块之间的差异

C-V2X安全证书:保障车路云系统通信安全的关键
数字证书与数字签名:汽车C-V2X通信安全的基石

Qorvo半导体解码车联网:探索驾驶的未来浪潮与标准化
车联万物C-V2X与背后的连接组件
5G车联网按下加速键,三大厂商亮剑,5G车规模组新品有何亮点?

Samtec应用科普 | C-V2X技术在汽车领域的应用






 工商网监
工商网监
评论