 电子发烧友App
电子发烧友App


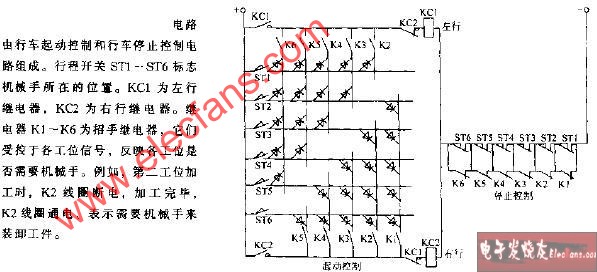
工业机械手简易程控电路图
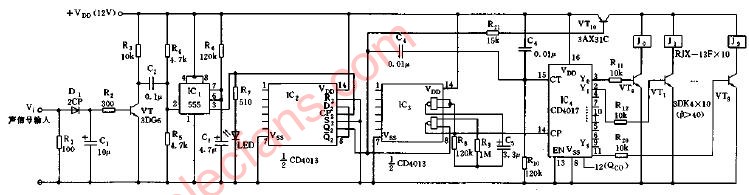
- 电路图(495405)


相关推荐
PLC经典实例:简易机械手的PLC控制线路与程序详解
,SQ3为上到位检测开关,SQ4为下到位检测开关,SQ5为工件检测开关。 图5-9 简易机械手的结构 简易机械手控制要求如下: ①机械手要将工件从工位A移到工位B处。 ②机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQI、SQ3均闭合。 ③若原点条件
2022-12-05 13:47:00 17716
17716
17716工业机械手设计基础PDF电子书免费下载
工业机械手是近十几年来出现的一种技术装备,它能模仿人体上肢某些动作,在生产过程中代替人搬运物件或操持工具进行操作。在工业生产中应用机械手,可以提高劳动生产率、保证产品质量,减轻工人劳动强度,实现
2019-12-25 08:00:00 74
74
74基于PLC的四轴联动简易机械手控制系统
一四轴联动简易机械手的结构及动作过程 机械手结构如下图1所示,有气控机械手(1)、XY轴丝杠组(2)、转盘机构(3)、旋转基座(4)等组成。
2010-08-02 18:17:315199
5199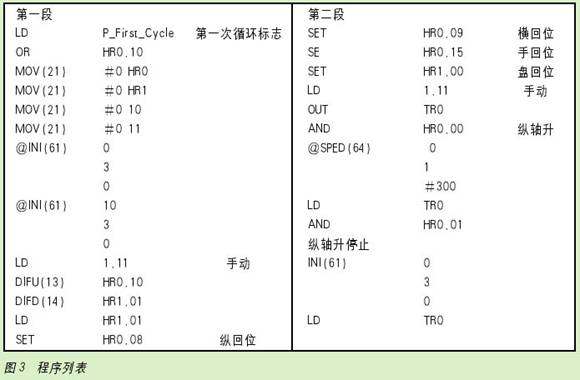
计算机-PLC在机械手远程控制系统中的应用
本文针对机械手的远程控制问题,选用三菱FX2N 系列PLC 作为控制器,以计算机为主站,实现了机械手的可视化远程控制。文中介绍了控制系统的组成,阐述了控制系统的设计方法。
2009-08-31 09:11:1640
40
计算机远程控制在可移动机械手中的应用
阐述了计算机远程控制移动取物机械手的结构与实现过程,提出了其远程控制系统的体系结构及硬件构成。给出了实现机械手远程控制的具体解决方案。关键词:并行通讯口 远程
2009-07-08 08:27:0324
24
PLC控制机械手设计
PLC机械手控制的实现二、设计要求:1. 阐述机械手的工作原理2. 如何实现PLC对机械手的控制3. 机械手控制程序设计第一节 机械手的工作原理1.1 机
2008-12-13 14:15:22365
365






 工商网监
工商网监
评论