当涉及到控制系统中的精确调节和稳定性,PID(比例-积分-微分)控制算法是一种不可或缺的工具。本文将简单介绍 PID 控制算法,从基本概念到具体实现,一起了解如何使用 PID 控制算法来优化控制系统。
2023-08-29 16:39:04 429
429 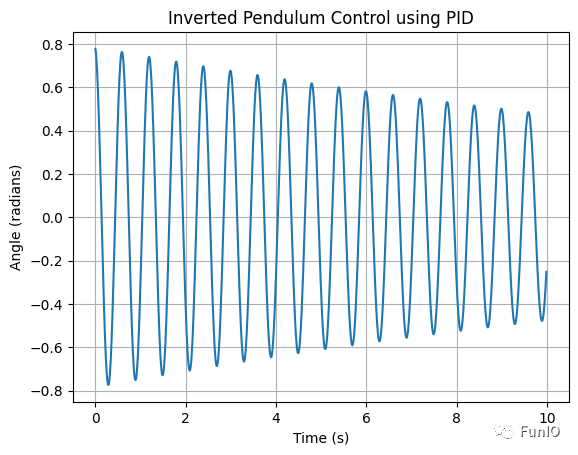
控制系统的稳定性
2013-04-10 20:59:20
倒立摆作为一种典型的控制系统实验装置,具有非线性、自然不稳定等特性,常用来作为检验某种控制理论或方法是否合理的典型方案。一阶倒立摆系统能用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、模糊控制及人工神经元网络等多种理论和方法都能在倒立摆系统控制上得到实现。
2022-02-10 11:46:56 3
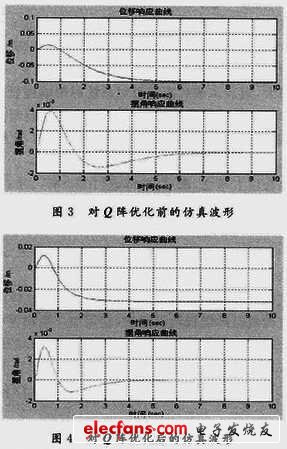
3 建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的设置窗口。
2020-05-03 18:11:005971 
系统控制上得到实现,而且当一种新的控制理论和方法提出以后,在不能用理论加以严格证明时,可以考虑通过倒立摆装置来验证其正确性和实用性。本文设计了基于单片机的得倒立摆控制系统,成本低廉,调试方便,能直观的观察控制效果,完成系统的调试任务,快捷的验证控制理论算法的正确与否。
2020-05-03 10:29:001088 
自动起摆控制器Swing-up Controller能够控制直线一级倒立摆由静止下垂的稳定平衡状态自动转化到竖直向上的不稳定平衡状态,而无需给摆杆施加力的作用,就可以实现摆杆的自动摆起。
2019-08-23 08:05:007308 
电子稳定性控制系统(Electronic Stability Program,简称ESP),它是一种先进的电脑控制系统,辅助驾驶者控制车辆的主动安全技术,可帮助驾驶员在恶劣行驶条件下提高车辆的车身稳定性。
2019-06-24 11:52:01947 本文档的主要内容详细介绍的是自动控制系统控制工程教程之稳定性分析的课程资料免费下载。
2018-11-22 08:00:009 ESP是英文 Electronic Stability Program的缩写,其中文含义为电子稳定程序我们一般称为稳定性控制系统,它是基于ABS系统基础上设计的一种综合性主动安全系统。 稳定性系统由众多部件组成,通过以下几个方面介绍系统的结构组成:传感元件、液压单元、控制模块。
2018-05-26 10:30:0011811 针对存在模型参数不确定性和外部扰动的直线型二级倒立摆系统的稳摆控制问题,对如何实现倒立摆系统鲁棒稳定的同时,还保证其达到期望的最优控制性能和H性能指标的稳定性控制问题进行了研究。基于状态反馈
2018-03-06 14:11:581 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是控制理论发展中的一个典型问题。目前,通过倒立摆系统验证过的许多控制方法在航天、机器人以及一般工业过程领域均有着广泛的应用。如航天飞机的姿态控制
2018-02-04 11:25:280 倒立摆PID算法源代码参考
2018-01-09 17:02:0720 鲁棒性和稳定性都是反应控制系统抗干扰能力的参数。那么关于鲁棒性和稳定性的区别有哪些,我们先来看看两者的定义。 定义上 所谓鲁棒性,是指控制系统在一定(结构,大小)的参数摄动下,维持其它某些性能的特性
2017-11-29 09:39:44242390 倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中
2017-11-27 16:36:0253705 倒立摆是典型的重上支下的系统,具有多个特点,包括不稳定性、快速多变性、耦合性等,其系统成本低廉、结构简单、便于进行实验室操作。而且倒立摆具有多种功能,能对控制系统进行检验、对机器人的行走和火箭发射等
2017-11-09 14:50:5623 通过对一阶旋转倒立摆系统原理的分析,选用单片机作为控制器,直流电机作为执行器,电位器式角度传感器作为反馈环节,采用PID控制算法设计实现了一阶旋转倒立摆控制系统。实验结果表明该系统在稳定的基础上具有
2017-10-19 15:21:0957 基于变量分组模糊控制算法的倒立摆系统_魏胜男
2017-03-16 08:00:000 一类T_S模糊控制系统的稳定性分析及设计_陈国洋
2017-02-07 18:22:060 模糊趋近律滑模变结构的二级倒立摆系统控制仿真_张志强
2017-01-30 23:17:311 现代控制理论-5.系统的稳定性
2016-12-13 22:20:481 一级倒立摆的PID控制设计
2016-11-08 18:51:1664 本文介绍了一种简易环形倒立摆控制系统的设计实现
2016-08-23 16:27:2420 为进行性线控制器的设计首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立
2016-06-14 15:29:5616 时变随机系统——稳定性、估计与控制,下来看看。
2016-04-12 11:55:5019 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问
2015-12-11 11:06:5214 基于MATLAB的模糊控制倒立摆系统研究,感兴趣的可以下载看看。
2015-11-03 13:49:5836 倒立摆系统是一种典型的控制系统模型,能够将实际与理论相结合,可以开发出新的控制算法来应用在系统模型之上。采用模糊控制算法研究二级倒立摆系统的控制问题,设计模糊控制
2012-08-29 15:04:08111 利用stm32控制平板倒立摆使用了红外遥控,pwm控制,串口调试角加速度传感器,里面就是代码。
2012-07-24 17:39:33209 本文建立一级倒立摆的数学模型,阐述了变速积分的PID优点,对一级倒立摆的变速积分的PID控制进行仿真,对比传统PID控制有明显的性能改进。
2012-02-03 17:14:5073 为实现二级倒立摆系统的实时稳定控制,以深圳固高直线二级倒立摆装置作为控制对象,在MATLAB环境下,利用基于二次型最优控制理论的线性二次型(Linear Quadratic Regulator,LQR)最优控制器
2012-01-18 15:07:3053 为了实现一级倒:芷摆系统自摆起和稳定控制,该文采用了最优控制与PID控制相结合的控制方法。首先,采用BangBang控制理论设计开环时间最优控制器,实现倒立摆的平稳快速摆起,同
2012-01-18 15:00:3491 基于虚拟仪器 LabVIEW 平台组建了车辆稳定性控制(VSC)硬件在环系统。采用滑模变结构控制算法设计了汽车稳定性控制策略;采用LabVIEW 图形化程序设计VSC控制程序,并以ARM7 嵌入式系统开发
2011-07-27 16:45:1567 倒立摆 系统是一个复杂的非线性系统本文建立了倒立摆的一种非线性数学模型在分析的基础上为倒立摆系统设计了一种模糊控制方案我们对一级倒立摆系统进行了控制取得了较好的效果
2011-07-06 18:19:4856 倒立摆 系统是一个复杂的!非线性的!不稳定的高阶系统 倒立摆的控制一直是控制理论及应用的典型课题分析了如何利用拉格朗日方程对直线柔性连接两级倒立摆系统建模采用法设计最优
2011-07-06 18:17:2242 在 智能控制 系统分层递阶结构的基础上,结合倒立摆的特点,根据被控对象的不同情况,分别采用了不同的看法,提出了基于分层递阶智能控制的倒立摆研究
2011-07-06 18:07:3625 在对 二级倒立摆 系统的动力学方程进行建模的基础上将其转化为线性定常系统的状态控制问题,提出了基于matlab的二级倒立摆控制系统
2011-07-06 18:05:25111 针对 倒立摆 的起摆控制建立了环形单级倒立摆基于拉格朗日方程的运动方程,在此基础上提出了能量控制的概念,并将能量补偿控制应用在环形单级倒立摆系统上,仿真和实际控制结果表
2011-07-06 18:03:4967 阐述了 倒立摆 实验系统及其在自动控制领域中的应用
2011-07-06 18:02:0353 本文详细地阐述了 倒立摆 系统及其在自动控制领域中的应用
2011-07-06 18:00:2257 对一维 倒立摆 系统的稳定和起摆进行了深入研究。通过$% 理论对系统进行坐标和输入量的变换,实现了系统的局部线性化,使得倒立摆系统的稳定控制不再需要对数学模型中的非线性
2011-07-06 17:59:0041 针对跟随控制系统和领导者智能体队形控制系统相似的特点,通过输入-状态稳定性(Input-to-StateStability ISS)分析了跟随控制系统的稳定性,验证系统控制器的性能。跟随控制系统由主动
2011-05-12 17:11:5428 固高科技的环形倒立摆系列产品采用开放的控制解决方案和模块化的实验平台,以旋转运动模块为基础平台,轻松构建环型一级倒立摆,环形串联两级倒立摆、环形并联两级倒立摆,甚至
2011-04-05 22:30:30136 研究了具有随机网络诱导时延及数据包丢失的网络控制系统随机稳定性问题.本文用一个具有两个状态的马尔可夫链来描述数据通过网络传输时随机数据包丢失过程,利用马尔可夫跳变线
2011-03-28 22:01:5124 倒立摆系统是多变量、非线性、强耦合的控制系统。采用模糊控制理论研究二级倒立摆控制问题。运用最优控制方法设计融合函数以降低模糊控制器的维数,减少模糊控制规则数,
2010-12-29 17:29:0846 针对多输入多输出的倒立摆系统平衡控制,利用牛顿-欧拉方法建立了直线型一级倒立摆系统的数学模型。在分析的基础上,采用状态反馈控制中极点配置法设计了用于直线型一级
2010-12-17 16:28:0254 概述
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中
2010-08-05 15:26:581333 倒立摆是控制领域中典型的被控对象。本文通过智能控制算法实现倒立摆的起摆控制。当摆杆的角度进入稳定区域时,通过PID控制算法使摆杆稳定。整个控制过程由基于DSP(Digital Sig
2010-08-05 15:24:5728 电子稳定性控制系统ESC解决方案
电子稳定性控制系统(ESC)帮助驾驶员保持对于汽车的控制。通过采用一个微控制器,一套用于测量汽车辆横向和纵向加速度
2010-04-12 15:22:544958 
什么是车辆稳定性控制系统(VSC)
这个系统是以ABS为基础发展而成的。系统主要在大侧向加速度,大侧偏角的极限工况下工作
2010-03-12 09:29:341561 介绍了一次调频参数的设置方法及对协调控制系统稳定性的影响,并且对如何在发挥一次调频作用的同时减少对协调控制系统稳定性的影响提出了建议,提出了将DEH一次调频因子
2010-02-02 13:51:2218 二级倒立摆的模糊控制研究
1 引言
在控制理论发展的过程中,某一理论的正确性及实际应用中的可行性都需要一个按其理论设计的控制器控制一个
2009-12-23 09:53:182097 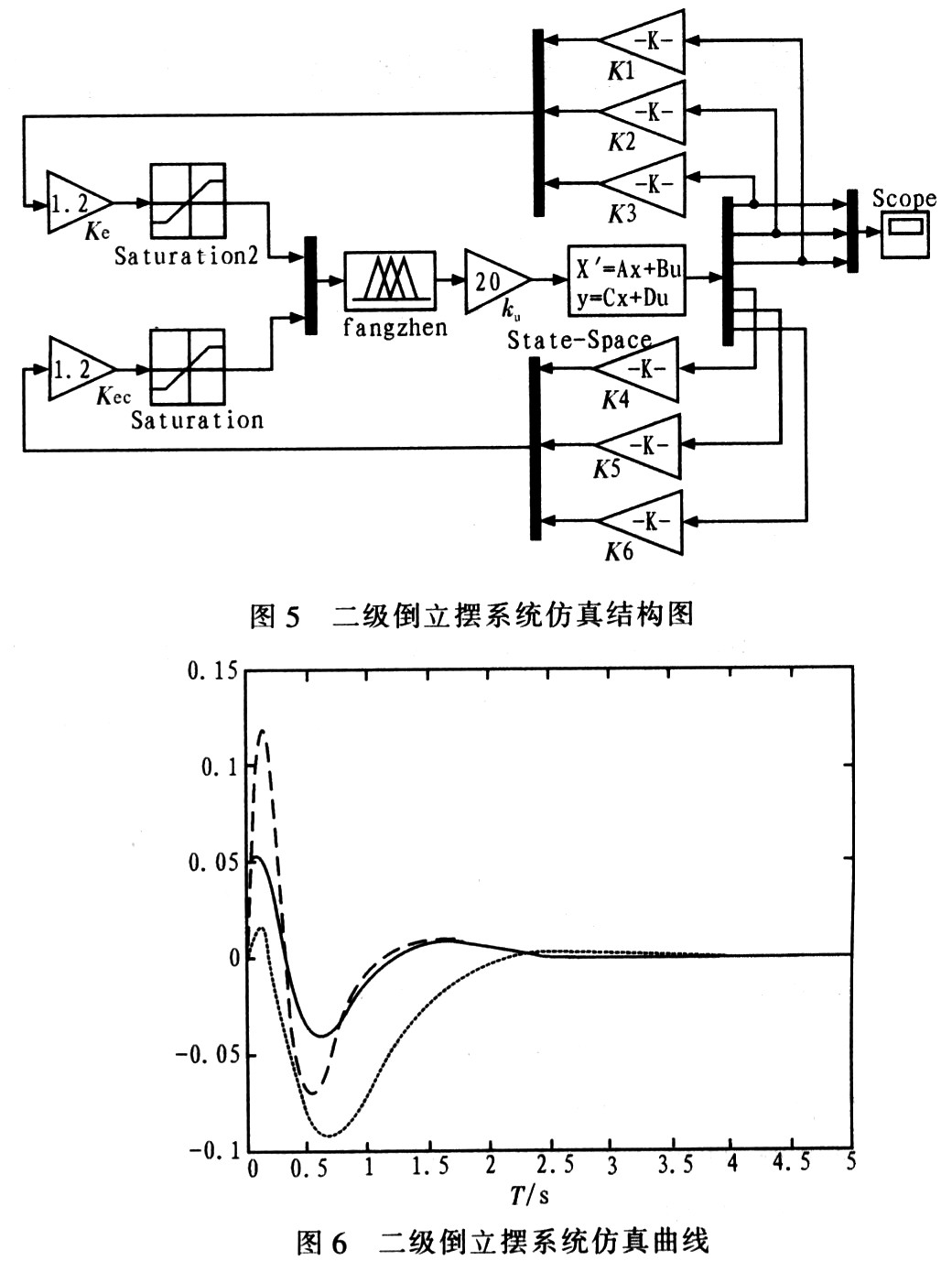
利用Lagrange 方程建立了系统的动力学方程,对n 级倒立摆系统的建模问题进行了具体研究,经过严密的数学推导,给出了n 级倒立摆系统建模的基本过程,获得了一组可普遍性地描
2009-12-14 13:55:4916 直接能量平衡法协调控制系统稳定性对策研究:为了解决直接能量平衡法协调控制系统动态和稳态下的稳定性问题,通过对某大型单元机组自动控制系统的优化工作,大幅度提
2009-10-10 15:29:3312 倒立摆控制系统是一个典型的高阶次、不稳定、多变量、非线性和强藕合控制系统。本文研究分析了单节倒立摆控制系统的数学模型,介绍了线性二次型最优调节器(LQR)的基本原
2009-09-02 16:38:2724 提出了利用TS-PID 对单级小车倒立摆进行控制的方法,并且对TS-PID 控制器进行了简要的理论分析,最后利用matlab 的simulink 工具对该控制系统进行了仿真,其结果表明该控制方法可行
2009-08-31 08:20:2720 选用 LabVIEW 作为倒立摆控制系统的界面设计开发工具。为了在LabVIEW 图形化编程环境下使用倒立摆控制器Windows 环境下的动态链接库,本文将动态链接库中的函数全部转换设计为在LabV
2009-08-26 09:40:3527 本文针对LQR 控制在单级倒立摆控制中的不足,设计了一个LQR 结合PID 的复合控制。并在Borland c 语言环境下编写控制程序,成功实现倒立摆的控制,其控制效果比单一LQR控制的抗扰
2009-08-15 10:54:1621 倒立摆控制系统是一个典型的高阶次、不稳定、多变量、非线性和强藕合控制系统。本文研究对象是基于研华公司数据采集卡PCI—1710—B 的倒立摆控制系统。通过对一级倒立摆系统
2009-08-15 08:13:4525 为保证闭环系统的全局渐进稳定性,系统的时延必须是有界的。本文中讨论了具有网络诱导时延的网络控制系统的模型,同时给出了最大允许传输间隔以及一个实际例子。实践证
2009-08-13 11:39:5417 为保证闭环系统的全局渐进稳定性,系统的时延必须是有界的。本文中讨论了具有网络诱导时延的网络控制系统的模型,同时给出了最大允许传输间隔以及一个实际例子。实践证
2009-08-13 11:38:5112 针对倒立摆的非线性采用T-S模糊控制的方法对倒立摆进行控制,建立了倒立摆的数学模型,并用Matlab 进行了仿真,仿真结果表明该控制方法对倒立摆具有好的控制效果。关键
2009-08-10 09:39:3215 本文介绍了一种基于SPCE061A 单片机的二级倒立摆控制系统。主要阐述了状态空间法在本系统中的应用以及功能设计,并简要介绍了系统的软件设计思路。关键词:单片机; 状
2009-08-04 08:42:0925 控制系统的时域分析法--线性系统的稳定性
2009-07-27 14:17:512410 
找出PLC控制系统的干扰源, 以西门子S7为例,从应用的角度提出了PLC控制稳定性的方法。PLC是80年代发展起来的新一代工业控制装置! 它是集自动控制" 计算机和通信技术于一体的产
2009-07-01 17:19:3837 本文简要说明了二级倒立摆系统及其建模,并分析了这个系统的特点。着重于建立一个单片机系统,在状态反馈的基础上实现对倒立摆的控制。关键词:倒立摆 单片机 状态反馈
2009-06-26 10:32:1349 针对单级倒立摆系统的单输入双输出、强非线性、强耦合的不稳定系统,提出了双回路PID 控制方案。通过仿真试验研究了双回路PID 多种组合控制方案的可行性,并选出最佳方案——
2009-06-17 09:34:2833 本文以倒立摆控制系统控制为例,介绍Borland C++ Builder 在数据采集、处理中的应用,并根据系统控制算法控制电机左右运动,从而保证倒立摆能稳定地站立在竖直位置。关键词: C
2009-06-15 09:26:3127 倒立摆是非线性、不稳定的系统。本文使用单神经元PID 控制算法,设计出基于小车位移和摆杆摆角两个回路的单神经元PID 控制器,并与传统的PD 控制策略相比较,验证了其有效
2009-06-11 16:39:4023 在化工装置中,加热炉的运行稳定性在控制系统从继电器系统升级到PLC 系统后,已经大大提高。对控制系统中硬件设备及软件结构作进一步改进,继续提高加热炉稳定性。以某聚
2009-06-03 08:48:0621 本文通过拉格朗日方程推导出环形一级倒立摆系统的数学模型,用能量方法对该模型进行摆起控制;在倒立摆成功摆起后,在倒立平衡点对系统模型进行线性化,并用线性二次型
2009-05-25 15:07:0220 引言
倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智
2009-01-01 21:05:33672 
控制系统时域仿真和稳定性研究
凡是能用二阶微分方程描述的控制系统,都称为二阶控制系统。典型二阶控制系统的闭环传递函数
2008-10-16 23:53:481683
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论