 电子发烧友App
电子发烧友App


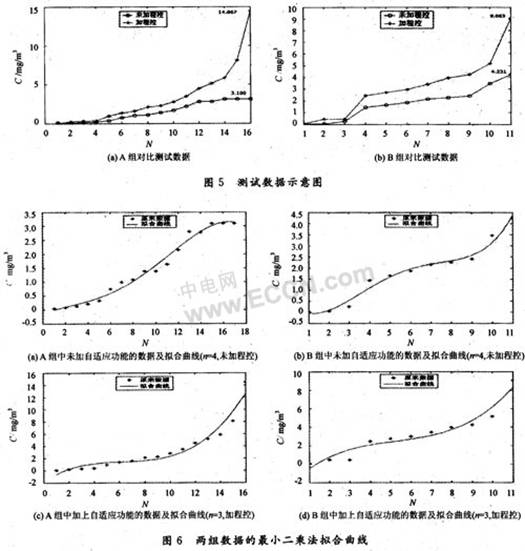
摘要:为了扩大粉尘测量仪的测量范围,采用一种自适应的测量方法,即根据被测环境粉尘的浓度自动调节传感器的接收灵敏度,并结合相应的软件算法,使高、低浓度的粉尘都能得到有效测量。在设计过程中运用PID算法对测量过程进行控制,使测量仪在运行中进行实时调节,以降低测量数据的振荡。通过对烟雾释放出粉尘的浓度测量,运用Matlab对测量数据进行拟合,得到了平滑的响应曲线。实测结果表明,该方法有效地扩大了测量范围,使测量范围达到了0.01~48 mg/m3。
关键词:自适应;粉尘测量;PID;数字滤波
随着我国现代工业的发展,空气中粉尘的污染越来越严重。目前我国一些环保部门仍采用“滤膜称重法”测量粉尘浓度,这种方法不能实现在线连续测量,且测量误差较大。国外均采用基于光散射理论的在线测量,该技术已非常成熟。目前我国也展开了基于光散射测量粉尘技术的研究,但与国外技术相比,还有很大差距。在多年对光散射法测量粉尘浓度的研究中体会到这种方法的测量范围小,仪器数据显示不稳定,本文提出一种自适应测量方法,通过实验验证,该方法能有效扩大测量范围,减小振荡。
1 仪器的总体设计
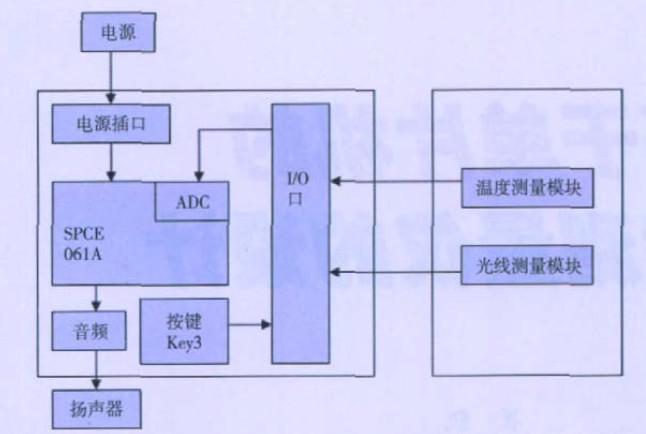
测量仪主要由光学传感器、气路系统、光/电转换、放大器、A/D转换、微机控制与管理系统、电源系统组成,其总体结构如图1所示。仪器的工作过程如下:

由半导体激光器发出的光波穿过具有粉尘的被测区域后,光学传感器将接收到的光信号转换成电信号。为确保能对信号直接进行A/D转换,提高信号的抗干扰能力和仪器的灵敏度,还必须对信号进行调理。调理后的电信号通过A/D转换后再传送到微处理器,通过微处理器对数据进行处理分析再显示。
2 自适应测量的实现
2.1 自适应调节原理
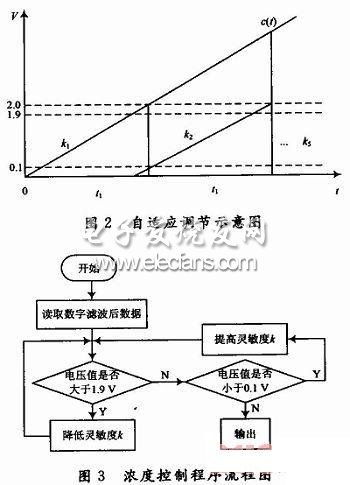
采用一般传感器测量粉尘浓度,其测量范围约为0~3 mg/m3。为保证高浓度和低浓度的测量准确性,扩大仪器的测量范围,本文提出了一种通过调节传感器接收灵敏度来实现自适应调节的算法(调节原理如图2所示),即当被测环境的粉尘浓度较低时,提高传感器的接收灵敏度;当被测环境的粉尘浓度较高时,降低传感器的接收灵敏度,并通过实验对这种方法进行了验证,图3是软件控制流程图。
2.2 实现电路
图4是光电转换原理图,Rf是程控的电阻调节网络,通过对Rf值的调节,改变传感器的接收灵敏度,使不同信号值均能得到有效测量。其功能实现如下:当仪器进入测量时,微处理器发出控制命令,使传感器处于接收灵敏度最高状态。读取数据后判断传感器是否处于最佳工作状态,若发现溢出或不在最佳工作状态,则改变传感器的接收灵敏度,使其进入最佳的工作状态。为了使测量数据统一,通过软件对测得的数据进行修正。





















 工商网监
工商网监
评论