GTS六自由度激光自动精准跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器,被广泛应用在飞机、汽车、船舶、航天、机器人、核电
2023-10-12 09:26:16
电子发烧友网站提供《多自由度仿生假手嵌入式控制系统及其抓取策略.pdf》资料免费下载
2023-10-10 11:18:38 0
0 GTS6000激光跟踪仪与空间姿态探头配合组成六自由度激光跟踪仪,能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。
2023-07-21 10:58:58 236
236 
中图仪器GTS激光跟踪测量系统已经发展出三自由度激光跟踪仪和六自由度激光跟踪仪家族系列,可以和多种形式的合作目标测头配合使用:1、GTS3000激光跟踪仪与光学回射靶球配合组成三自由度激光跟踪仪
2023-07-21 10:58:110 线性2自由度汽车模型是汽车操纵稳定性分析中最简单、最典型的模型。
2023-06-28 16:52:31541 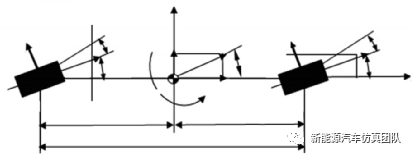
本期采用Simulink建立汽车2自由度动力学模型。为了便于掌握汽车稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2023-06-28 16:39:13443 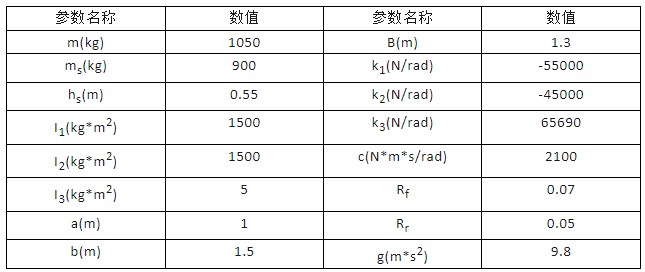
本文示例将实现4自由度并联机器狗行走的功能。
2023-06-18 10:49:20316 
本文实例将实现2自由度并联仿生腿模组运动起来,模拟实现狗腿行走的动作。
2023-06-18 10:35:20136 
1. 功能说明 本文示例将实现R328a样机4自由度并联机器狗下蹲的功能。 2. 结构说明 本样机的并联驱动结构与 【R082】4自由度并联四足 类似,两款样机可以
2023-06-09 11:10:51213 
人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。没想到知乎上居然有人把这个问题回答的这么专业有内涵,同时又那么有哲理,忍不住想要把这个答案分享一下。
2023-06-07 15:48:16529 
随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过复杂的几何运动对载荷进行精确操控。
2023-05-18 17:34:21404 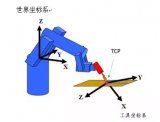
基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索技术,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求。
2023-04-20 10:07:05572 工业机器人自由度一般分为4个自由度,或者6个自由度,关节机器人主要是模仿人的手臂进行设计的。
2023-03-16 12:20:30892 1、功能描述 R308样机是一款拥有3自由度的串联机械臂。本文提供的示例所实现的功能为:在3自由度串联机械臂样机上安装电磁铁,实现电磁铁搬运物品的功能。 2、电子硬件 在这个示例中,我们
2023-03-09 08:31:06376 
多自由度精密定位技术在纳米计量、显微成像、精密机床、半导体制造等领域具有重要地位。
2023-03-06 14:08:05256 1. 运动功能说明 R204样机是一款拥有4个自由度的串联机械臂。本文示例实现4自由度串联机械臂抓取物品、放下的功能。 2. 结构说明 R204号样机由4个串联的 舵机关节模组 和1个
2023-03-03 17:35:42351 
一个微型的三自由度机械臂,您甚至可以记录运动并循环它!
2022-12-07 14:00:370 汽车驾驶模拟器二自由度运动系统
2012-08-06 13:06:11
ADIS16489七自由度惯性传感器数据表
2021-06-02 15:02:583 ADIS16488:战术级十自由度惯性传感器数据表
2021-05-27 18:24:5611 ADIS16497:战术级六自由度惯性传感器数据表
2021-05-25 20:07:047 ADIS16495:战术级六自由度惯性传感器数据表
2021-05-25 18:04:218 ADIS16385:六自由度惯性传感器报废数据表
2021-05-24 09:14:261 ADIS16365:六自由度惯性传感器数据表
2021-05-23 20:27:512 ADIS16485:战术级六自由度惯性传感器数据表
2021-05-23 17:32:479 ADIS16334:低调六自由度惯性传感器数据表
2021-05-23 13:27:265 ADIS16367:六自由度惯性传感器报废数据表
2021-05-10 15:50:024 ADIS16407:十自由度惯性传感器数据表
2021-05-09 18:03:099 ADIS16486:六自由度惯性传感器数据表
2021-03-22 13:11:534 什么是六自由度压电纳米定位台? 六自由度压电纳米定位台可产生X、Y、Z三轴直线运动以及x、y、z 三轴偏转/旋转角度运动的压电平台。六自由度压电定位台应用举例 -光纤对接调整 光纤裸纤一般分为三
2020-08-10 11:37:39845 三自由度飞机飞行姿态模拟实验台是集机械技术、控制技术和传感器检测技术、计算机技术于一体的综合性测试设备。它作为一种空间运动机构是飞机进行动态性能测试的关键设备,主要用于模拟飞机的运动姿态,为飞机提供
2020-04-12 17:17:00715 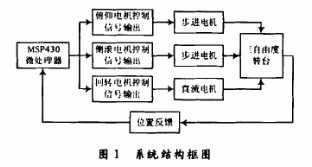
小型廉价的6自由度机械臂,希望能圆大家一个玩机械手的梦! DFLG6DOF机械手由6个微型伺服电机(舵机)组成,分别对应于臂、肘、腕(2个自由度)、张合5个关节和1个旋转底座,每个关节可在一定范围内运动,底座可以实现左右90度旋转。通过上位
2020-01-14 10:48:393941 
二自由度DF05BB舵机云台是一款5公斤大扭矩、高性价比的小型云台,可以在水平和垂直方向做二自由度运动,方便安装摄像头,可以实现图像监控、图像识别定位追踪;加装红外传感器或超声波测距传感器可以组合成一体化探测装置,使机器人能感测周围障碍物,从而实现机器人避障功能。
2019-12-04 14:21:343503 
这是一款兼容Arduino的有6自由度传感器扩展板,它使用了一个ADXL345三轴加速器和一个ITG-3200三轴螺旋仪。
2019-11-27 15:35:54831 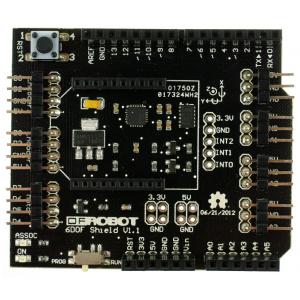
我希望这些照片对您有所帮助组装您的4自由度机械臂。
2019-10-09 11:52:039029 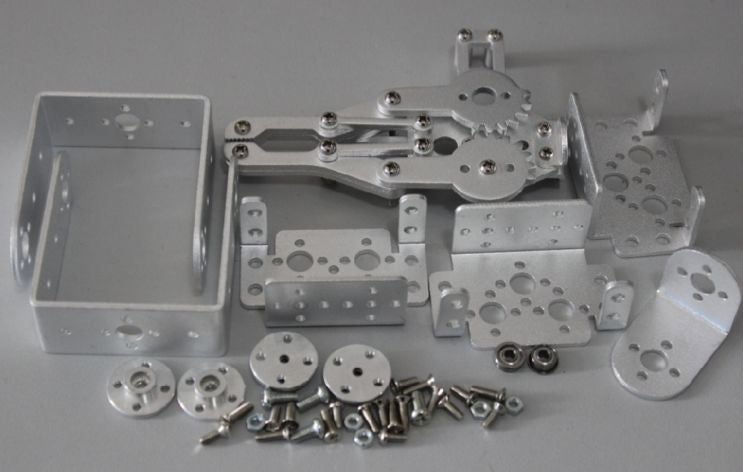
6自由度惯性传感器—ADIS1633x,1636x,1637x和1638x
2019-07-19 06:03:002366 现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-03-17 09:23:0225476 积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度
2018-10-07 10:57:005266 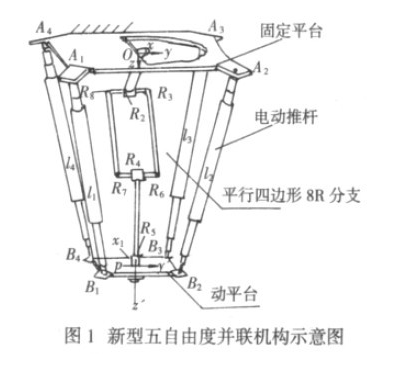
记者从中国科大获悉,该校郭光灿院士团队李传锋、周宗权等人成功研制出多自由度并行复用的固态量子存储器,在国际上首次实现跨越3个自由度的复用量子存储,并展示了时间和频率自由度的任意光子脉冲操作功能。该成果近日发表在国际期刊《自然·通讯》上。
2018-08-30 14:08:071832 基于牛顿欧拉法,针对一种采用非对称液压缸构建的新型三自由度并联机构进行了完整的动力学建模,为该机构结构优化打下基础。运用非对称阀控制非对称缸负载匹配理论,给出了一定结构参数和运动性能要求下的负载轨迹、最佳负载匹配曲线以及相关液压参数,为液压元件的选型提供设计依据。
2018-03-26 11:15:211 针对三自由度并联气动柔性执行器的工作空间计算问题,对其T作空间的计算方法和评价标准进行了研究。对该类利用柔性结构和压缩空气实现运动的新型执行器进行了运动学分析。通过对其3个气动柔性元件以及两个圆盘
2018-03-13 10:39:520 对接控制设备仿真试验失重状态模拟三自由度气浮平台是为某空间对接控制设备的全物理仿真模拟验证试验设计的。通过对平台气浮功能及运动功能的设计,确定了气控系统工作原理及元件选型;在结构方面,注重运动的平稳
2018-03-01 10:25:190 现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个
2018-02-07 15:40:2517074 
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度(Degree of Freedom),由DOF简写表示。
2018-01-17 10:03:2010842 为了解决三自由度Delta机器人工作空间的仿真问题,在总结已有的Delta机器人工作空间仿真方法的基础上,基于Matlab和Catia提出了三种具有代表性的Delta机器人工作空间仿真方法,以实验室
2018-01-05 16:13:291 对机器人进行相应的优化设计可以使机器人具有更好的结构性能与工作性能。以一种三自由度冗余驱动混联机器人为研究对象,对该机器人尺寸参数无量纲化并分析该机器人可达的工作空间,进而在混联机器人工作空间中找出
2018-01-05 14:24:191 针对传统内模控制方法不能兼顾系统跟随性、抗干扰性和鲁棒性的问题,提出了一种基于三自由度内模控制的永磁同步电机矢量控制方法。该方法基于永磁同步电机矢量控制系统,分析了系统实现稳定性和鲁棒性的条件,根据
2017-12-29 16:27:473 在惯性坐标下的6 自由度空间动力学方程,并给出水下机器人期望状态的约束条件,获取水下机器人滤波跟踪误差及水下机器人系统的误差动力学方程,以此实现控制器的抗干扰设计,实验结果表明,所提方法下水下机器人控制器的控制
2017-10-28 13:04:499 三维移动和两维转动的5 个自由度。 少自由度并联机器人机构其动平台的独立输出运动数小于6。近十多年来,该类机构成为研究的一个热点。这是由于少自由度并联机器人结构简单、造价低,具有良好的应用前最。在许多场合,非期望
2017-10-23 16:24:5015 六自由度液压运动平台的迭代学习控制_卢颖
2017-03-15 08:00:001 双向中继X信道的自由度研究_党超
2017-03-04 18:07:530 六自由度机器人焊接轨迹研究_张用
2017-03-04 18:04:530 基于ARM的多自由度机械手设计_孙捷
2017-03-01 21:14:332 MIMO两跳干扰信道自由度研究_田文献
2017-02-28 20:32:020 基于模糊PD算法的三自由度机械臂遥操作双边控制_邱恒
2017-01-21 12:16:517 基于二自由度模型驱动PID的CFB锅炉床温控制_吴丹丹
2017-01-13 21:36:190 永磁转子偏转式三自由度电机电磁系统的建模与分析_李争
2017-01-08 12:03:280 两自由度直驱感应电机优化设计及特性分析_司纪凯
2017-01-08 11:28:380 多自由度超声电机驱动电路研究_朱华
2017-01-08 11:20:203 轴向电磁轴承多自由度承载力理论与实验研究_张云鹏
2017-01-07 18:39:174 一种高功率密度的二自由度电磁执行器_常思勤
2017-01-04 22:01:463 二自由度行波型超声波电机定子的优化研究_傅平
2017-01-04 16:45:451 19自由度机器人_动作例程,感兴趣的小伙伴们可以瞧一瞧。
2016-11-17 18:35:231 超声波在六自由度测量定位系统中的应用,有兴趣的同学可以下载学习
2016-05-04 14:37:5313 大专生毕业设计任务书《基于PLC的五自由度喷漆机械手控制系统设计》。
2016-03-18 14:03:5810 关于汽车在点头与沉浮两个自由度方向的问题,利用simulink进行求解。
2016-02-16 17:18:060 台灯是我们每个人夜晚学习看书的常用灯具,常见的台灯虽然可以弯曲到一定的程度,但是有时还是不能够满足人们自由的需求。LED灯光之家这就是自由度非常高的LED台灯,灯具模块由
2012-07-19 10:10:313330 
针对典型的工业过程控制对象,提出了一种二自由度内模控制方法,此方法可以使系统同时具有良好的目标值跟踪特性、干扰抑制特性和鲁棒性,改进了常规内模控制的不足,而且控制算法简
2011-05-23 15:12:4027 六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的关键所在。在一些早期的产品中对感应天线接收信号的处理主要采用模拟电路和单
2011-01-25 00:11:021041 
1 ADISl6300简介
ADISl6300四自由度(4DoF)IMU是一个完整的惯性测量传感器,其内置单轴陀螺仪和三轴加速计,每个传感器都实现了iMEMS(Motion Sig-nal Processing Technology)技术与
2010-09-08 11:44:20849 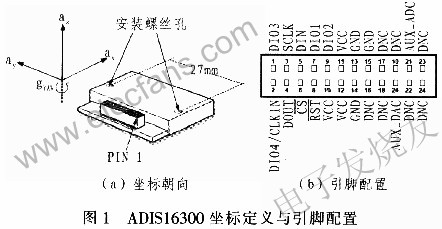
本文介绍了由计算机对步进电机控制从而实现多自由度运动的系统的设计。同时详细介绍了系统中的结构组成、软件的应用和步进电机的控制。该控制系统操作界面友好、简单,动
2010-07-21 09:54:0512 设计自由度很大的二级直耦宽带放大器
电路的功能
虽然很多单片IC也被称为宽带放大器,
2010-04-29 18:24:08996 
三自由度直升机的嵌入式控制系统
三自由度直升机可以应用于飞行器控制系统的半实物仿真试验和性能测试等场合,用以模拟横列式直升机,即倾转旋翼机的直升机状
2010-02-06 09:10:131179 
针对目前手动调整卫星姿态运动仿真设备气浮台时,调节时间过长而且平台浮起部分摆动周期过短的问题,提出了三自由度气浮台自动平衡技术。本文重点推导了三自由度气浮台
2010-01-18 13:52:1719 针对二自由度PID 控制器参数整定困难的问题,提出了一种基于单亲遗传算法的二自由度参数整定方法。运用该算法分别对单自由度PID 控制器和二自由度控制器进行了整定,并与
2009-12-26 13:56:4223 新型三自由度碟型磁浮马达特性量测与改善本计划将针对本校电机系所研制之新型三自由度碟型磁浮马达进行特性量测与改善。此碟型磁浮马达是由具有18 个E型硅钢片之三相交流
2009-11-17 18:13:3238 三自由度的机械爬虫的运动原理随着科学的发展,智能机器人在不知不觉中,逐步代替人类从事危险的工作,完成困难的任务:从深入火场救人,到探索无尽
2009-03-06 20:26:141871 
三自由度气动机械手的PLC控制
一、实验目的:通过对一个三自由度气动机械手的控制程序的设计,熟悉基于PLC的
2008-09-23 08:19:422987
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论